

Staubli史陶比尔机器人常见故障维修及问答
机器人
描述
staubli史陶比尔机器人示教器维修问题至关重要,而用于我国工业生产中的机器人大多数都是进口的,国内机器人维修技术匮乏,只能依赖国外的供应商,普遍存在售后服务不到位,返修周期长、维修成本高,动辄好几万的维修费用或者几十万的更换费用使得国内的机器人用户苦不堪言,上海柔智机器人专业承接史陶比尔机器人示教器维修,史陶比尔机器人维保服务
史陶比尔示教器常见故障及维修处理方案
1、示教器触摸不良或局部不灵(更换触摸面板)
2、示教器无显示(维修或更换内部主板或液晶屏)
3、示教器显示不良、竖线、竖带、花屏等(更换液晶屏)
4、示教器按键不良或不灵(更换按键面板)
5、示教器有显示无背光(更换高压板)
6、示教器操纵杆XYZ轴不良或不灵(更换操纵杆)
7、急停按键失效或不灵(更换急停按键)
8、数据线不能通讯或不能通电,内部有断线等(更换数据线)
史陶比尔机器人常见维护方法及建议
一、史陶比尔机器人维护,史陶比尔六轴工业机器人本体标准维护例行检查
1.根据现场工作清洁机器人本体。
2.固定主体和6轴工具端。检查机体和工具是否固定好。
3.检查每个轴的限位挡块。
4.检查电缆状态。检查机器人信号电缆、电源电缆、用户电缆和身体电缆的使用和磨损情况。
5.检查密封状态。检查机体的齿轮箱和手腕是否漏油、渗油。
史陶比尔机器人的维护,史陶比尔六轴工业机器人的功能测量
1.检查温度。通过专业的红外测温枪检查电机运行时的温度是否正常,通过数值比较各轴电机是否与标准值一致。
2.噪音检查:噪音检测仪用于检查手动操作时电机或变速箱是否异常,可作为检查部件状态的标准。
3.重复精度使用百分表检查机器人的重复精度是否正常。
4.机械零位测量检测机器人当前零位是否与标准校准位置一致。
5.检查电机制动状态,检查打开电机制动的电压值,并测试各轴电机的制动功能。
史陶比尔机器人维护更换
1.本体换油机器人的变速箱、平衡缸或连杆的换油。
2.机器人SMB板检查和电池更换检查SMB板固定连接是否正常,更换电池。
二:Staubel机器人控制柜的标准维护和日常检查
1.清洁控制柜。清洁机器人控制柜的外观,并清除控制柜内部的灰尘。
2.检查控制柜各部分的牢固度。检查控制柜内所有部件的紧固状态。
3.清洁教学设备,清洁和整理教学设备和电缆。
4.电路板指示灯状态检查控制柜中每个电路板的状态灯,以确认电路板的状态。
5.检查控制柜内的电缆。控制柜内所有电缆插头连接牢固,电缆整齐。
1. 史陶比尔机器人基本介绍
1.1 TX90 1代机器人

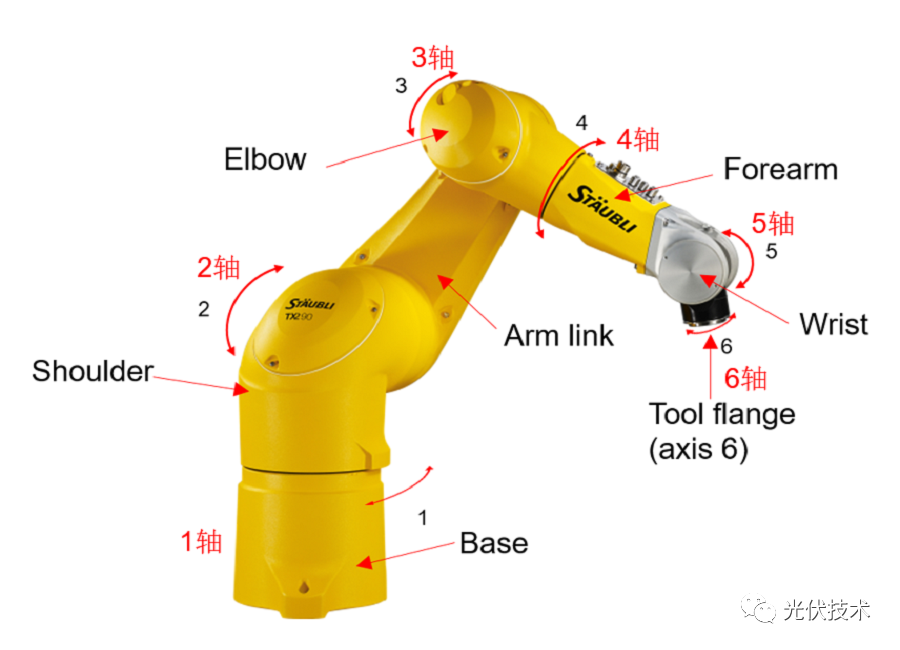
1.2 TX2-90 2代机器人

1.3 机器人型号规格
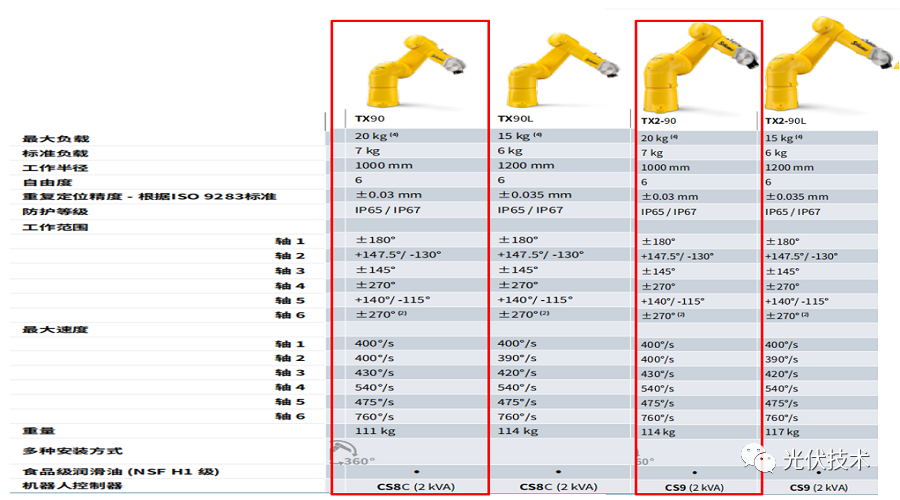
1.4 机器人运动位置
2. 史陶比尔SP1,SP2机器人示教器介绍
2.1 TX90 示教器
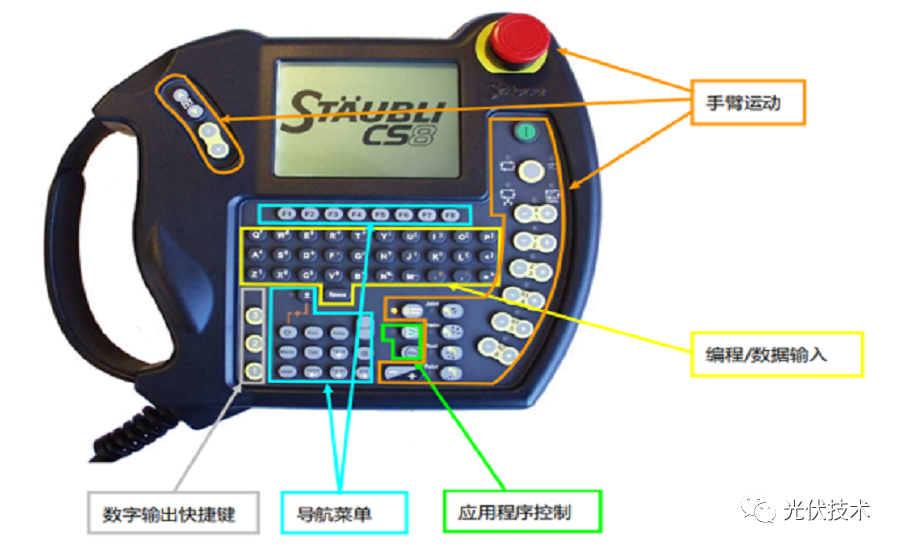

2.2 TX90 按键功能说明
1. 工作模式切换按钮(1)
a. 如果未使用 WMS,该按钮用于切换机器人工作模式。如果使用 WMS,该按钮无效。
b. 按钮周边的一个绿色 LED 灯指示当前机器人工作模式。
2. 手臂上电按钮(2)
a. 该发光按钮用来给手臂上电或断电。
b. 当绿色指示灯稳定发亮时,表明手臂已上电。在手动模式下,必须按使能按钮 DeadMan(11) 来给手臂上电。
3. 紧急制动按钮(3)
紧急制动只能用于在操作时发生无法预见的情况。 在确实需要的情况下,才能使用它进行制动。
4. 运动按键(4)
在手动模式下可用,用来产生手臂的运动(关节坐标或笛卡尔坐标运动),取决于选择的运动模式 (Joint, Frame, Tool) 。
5. 运动模式选择键(5)
当手臂上电并在手动模式时,这 4 个键中的任何一个都能用来选择所希望的运动模式 (Joint、 Frame、Tool 或 Point)。与该按键相对应的指示灯指明当前模式。

6. 速度调节按键(6)
该键可以使速度在运动模式所限制的范围内变化。速度在 MCP 的状态显示栏上给出。速度根据预先确定的值( 每按一次键,约2倍) 而改变。同时按 Shift 和速度键,当前的速度可以增加或减少 1%。

7. 功能键(7)
用它们来选择显示在它们上方的菜单。
8. 数字键(8)
这些键用来输入您所需的数据。
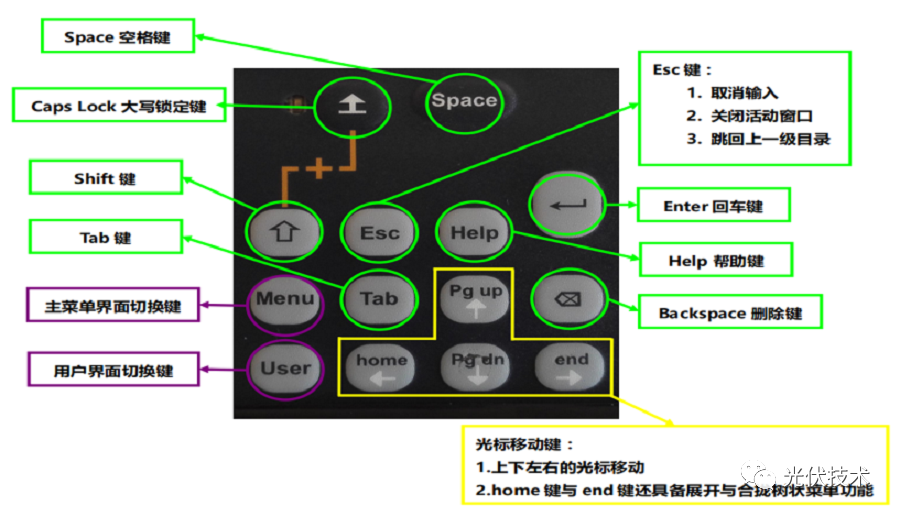
9. 界面和导航键(9)

10. 应用程控键(10)

a. STOP 键用于停止一个应用程序,RUN 键用于启动一个应用程序,Move / Hold 键用于控制机器人的运动与暂停。
b. 在手动模式中,在 Move / Hold 键按下时手臂可以运动。一旦松开这个键,手臂立即在程序设定的轨迹上停止运动。
c. 在本地或远程模式中,按 Move / Hold 键,运动被停止并使机器人转变为暂停模式。再按一下该键,运动继续。
d. 在手动和本地模式中,当手臂通电时机器人总是处于暂停模式。在远程模式中,一旦接通电源,就允许手臂运动。
11. 使能按钮(11)
该按钮有三个位置,其状态为:
a. 该按钮没按下时,打开。
b. 位于中间位置时,关闭。
c. 按钮位于完全下陷位置,对应使用者的紧张状态,打开。
只有该按钮在中间位置时,才允许使用这个按钮在手动模式下给手臂上电。其他 2 个位置禁止给 手臂上电,或者如果手臂在手动模式下上电时,禁止切断电源。在自动模式下,按钮的位置不起作用。
12. 数字输出快捷键(12)

在手动模式下,这些按键改变与它们相连的数字输出的状态。可以在控制面板的输出/输入列表中选择输出,然后同时按下“Shift”按钮和“1”,“2” 或“3”按钮进行关联。
13. Jog 键(13)

在手动模式中该键被启动,用来产生手臂的运动(关节坐标或笛卡尔坐标运动),取决于选择的运动 模式(Joint, Frame, Tool)。
2.3 TX2-90 示教器

2.4 TX2-90 按键功能说明
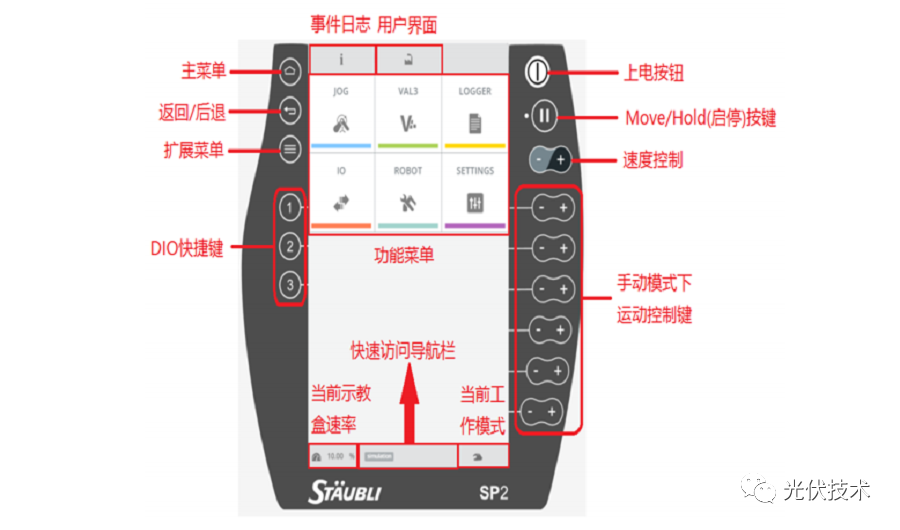
a. JOG:手动控制,示教、移动至点位;
b. VAL3:VAL3 应用程序,打开、运行、修改和保存等功能;
c. LOGGER:事件日志;
d. IO:输入/输出,机器人与外围设备之间的通信 (包括 "安全" 参数);
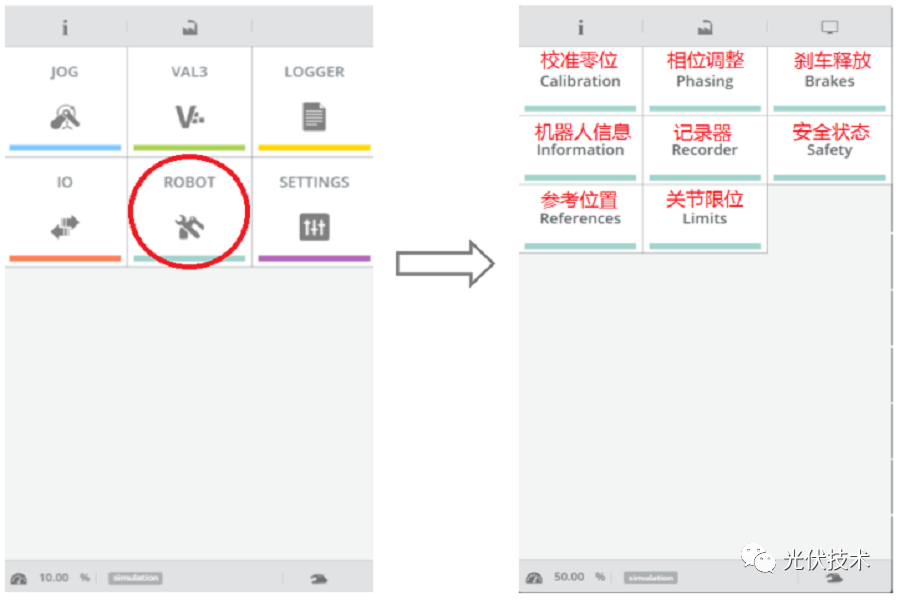
e. ROBOT:校准,恢复,定相(Phasing),刹车释放,信息:硬件和软件版本,记录器,安全功能;
f. SETTINGS:设置,网络,语言,时间与日期,访问权限。
1. JOG 手动控制功能

注意:当没有加载任何应用程序时,只能选择默认工具 flange 和默认坐标系 world 进行运动控制。
2. Joint 关节运动模式

Joint 模式是将机器人的各轴分开独立控制的运动模式。进入 Joint 模式后,示教盒上的运动控制键将分别对应机器人的各个关节。
3. Frame 坐标系模式—空间坐标系/笛卡尔坐标系
a. 进入 Frame 模式后,示教盒上的运动控制键将分别对应机器人按照当前所选空间坐标系的各方向上的平移(X, Y, Z)或旋转(RX, RY, RZ)。
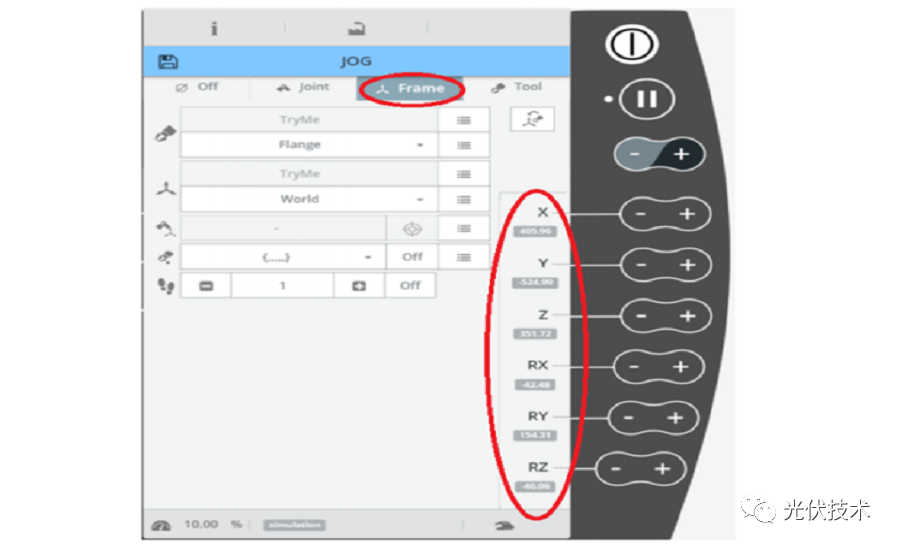
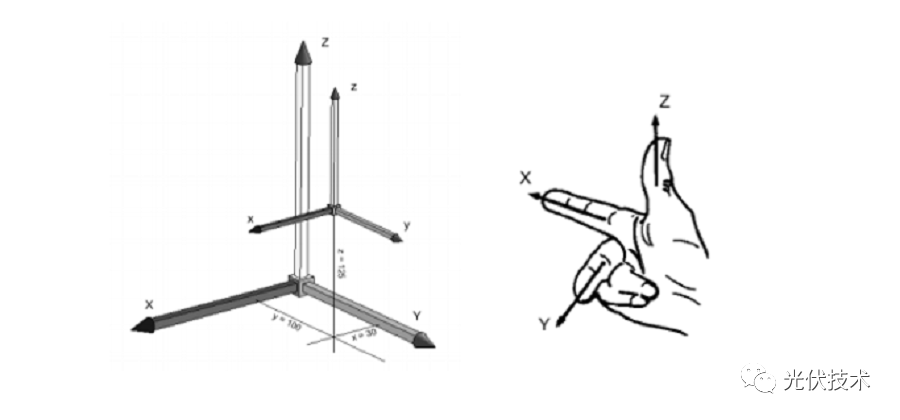
b. 在判断机器人运动方向时,通常使用右手定制来判断三个方向。
c. Frame 坐标系模式—空间坐标系位置方向
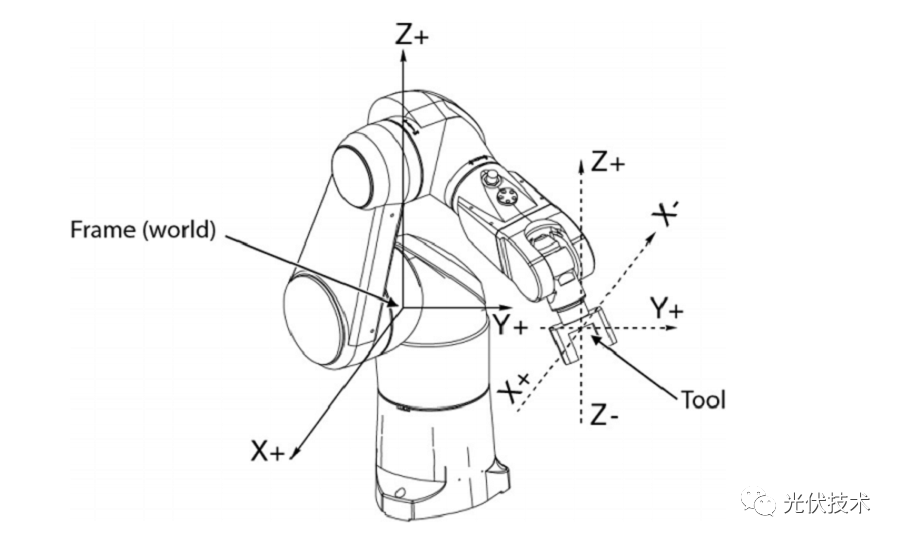
World 坐标系是机器人自带的默认坐标系,其方向只与手臂零位与安装方式有关。World 坐标系的 Z+ 方向为垂直于安装底面向外方向,X+方向为机器人正面面对方向,Y+方向为机器人左边方向。
4. Tool 工具模式

a. 运动控制键将分别对应机器人按照当前所选工具坐标系的各方向上的平移(X, Y, Z)或旋转(RX, RY, RZ)。
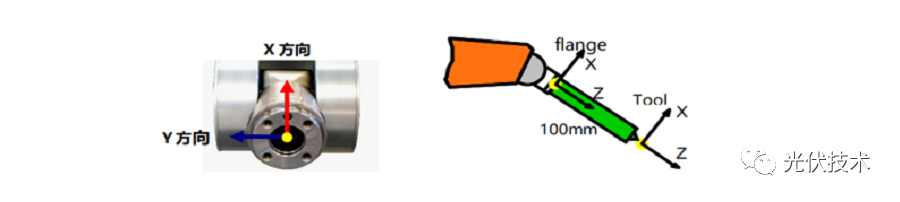
b. 默认状态下,工具坐标系的原点在法兰表面中心点,Z+ 方向为垂直于法兰平面向外方向,X+方向为沿着法兰表面定位孔向外方向,而 Y+方向可以通过右手定则确定。
c. 当选定其他工具时,工具坐标系的原点也会随之转移到工具末端 TCP 点。
5. VAL3 任务管理器
VAL3 应用程序管理器具有两个功能
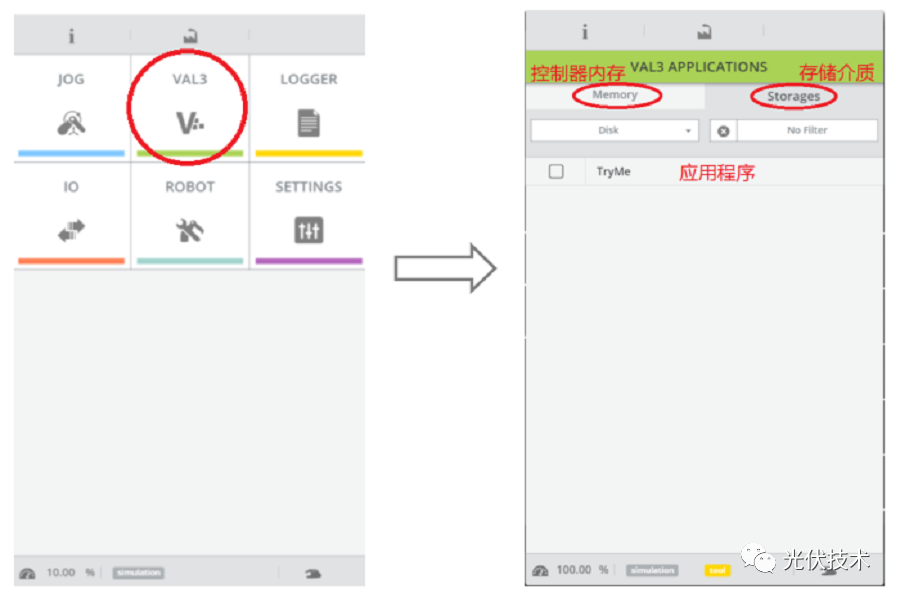
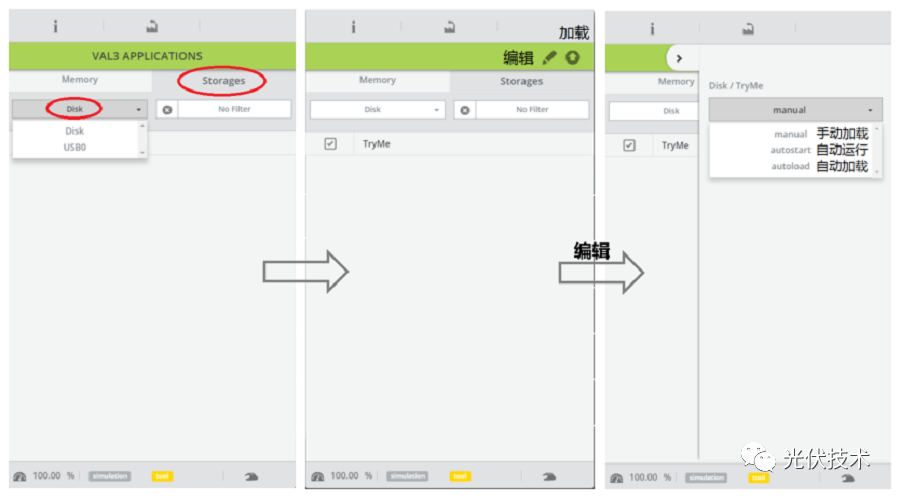
a. 管理外部设备(U 盘、PC 等)向机器人控制器内传输程序;
打开相应储存介质 → 选中目标应用程序 → 加载到控制器磁盘或编辑;
b. 管理控制器内已存在的程序的调试和运行。
进入控制器内存 → 选中目标应用程序 → 新建变量

进入控制器内存 → 选中目标应用程序 → 查看/编辑变量

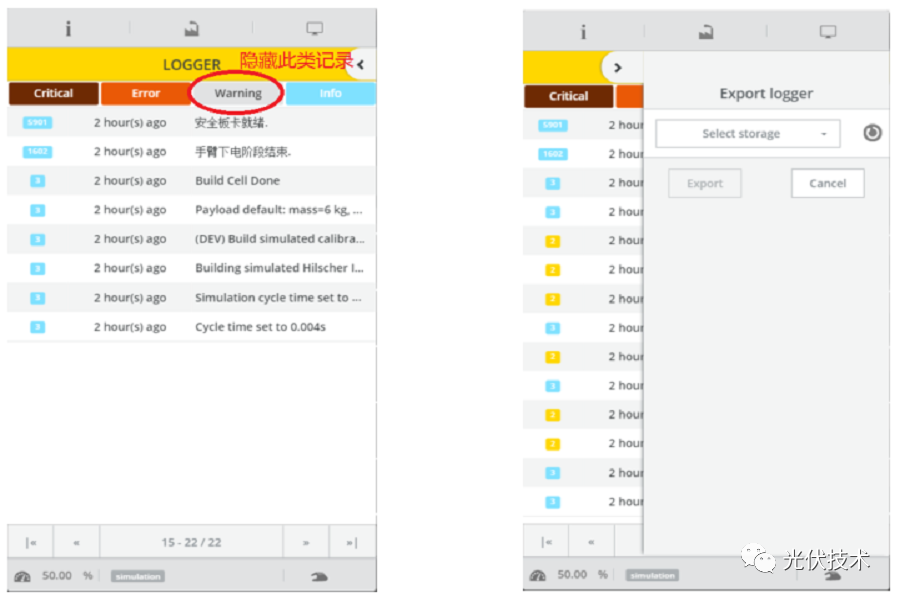
6. Logger 日志记录器
事件日志由色标区分,不同等级的记录消息由对应的颜色显示
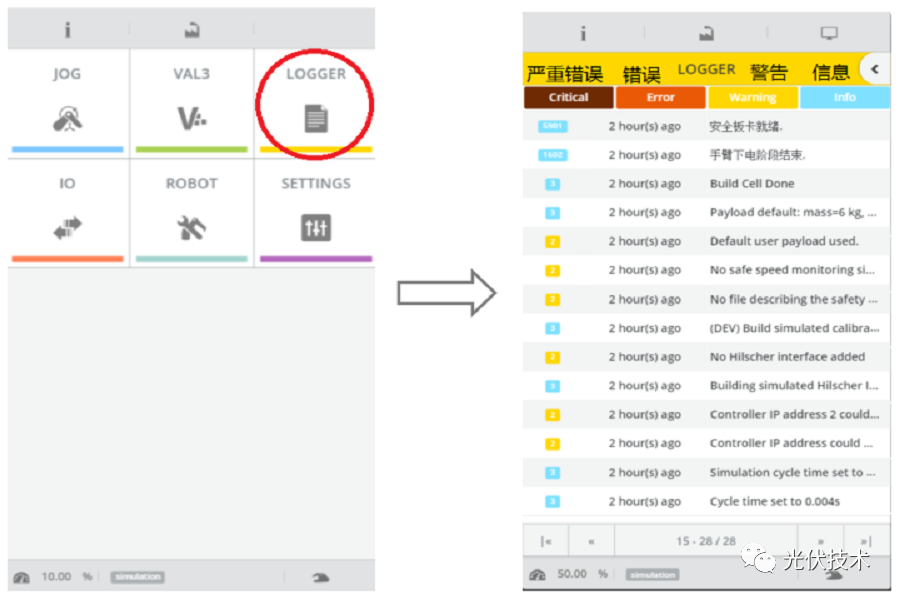
可通过点击分类标签进行记录筛选,通过展开右侧菜单,可导出事件日志至外接设备。
7. IO 输入输出管理
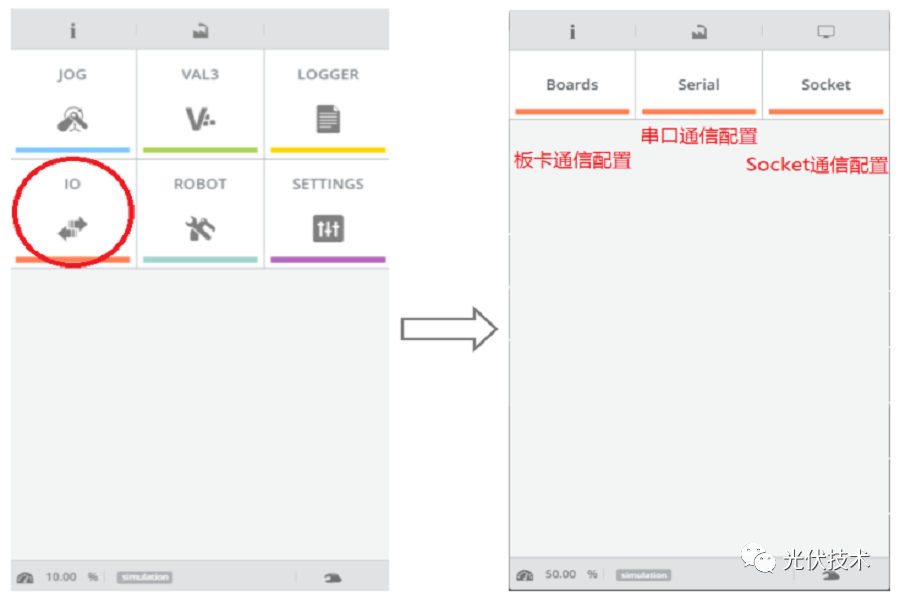
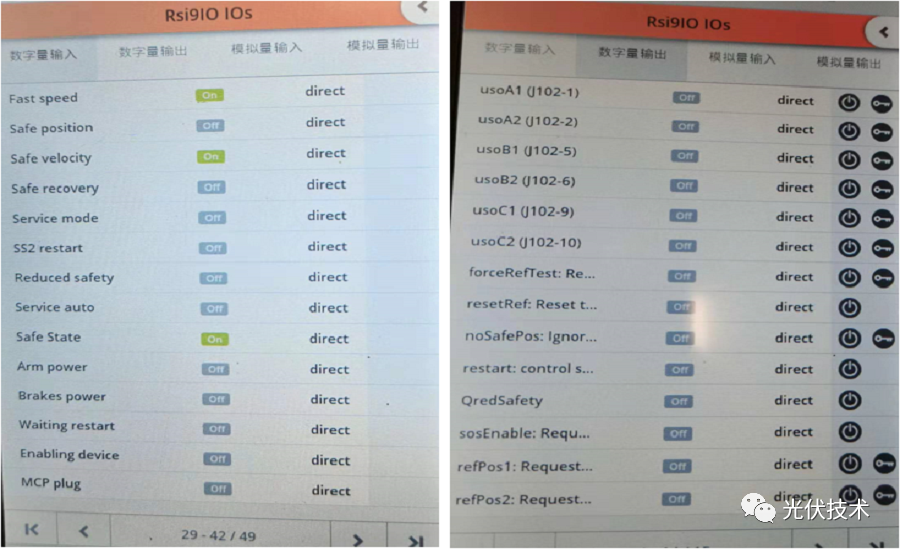
输入输出管理器管理整个机器人通过手臂或控制器与外界通信的信号,其中也包括内部自带的系统信号(默认隐藏,可手动显示)。通常在没有添加任何配置或通信板卡的情况下,所有可获得的物理 I/O如下:
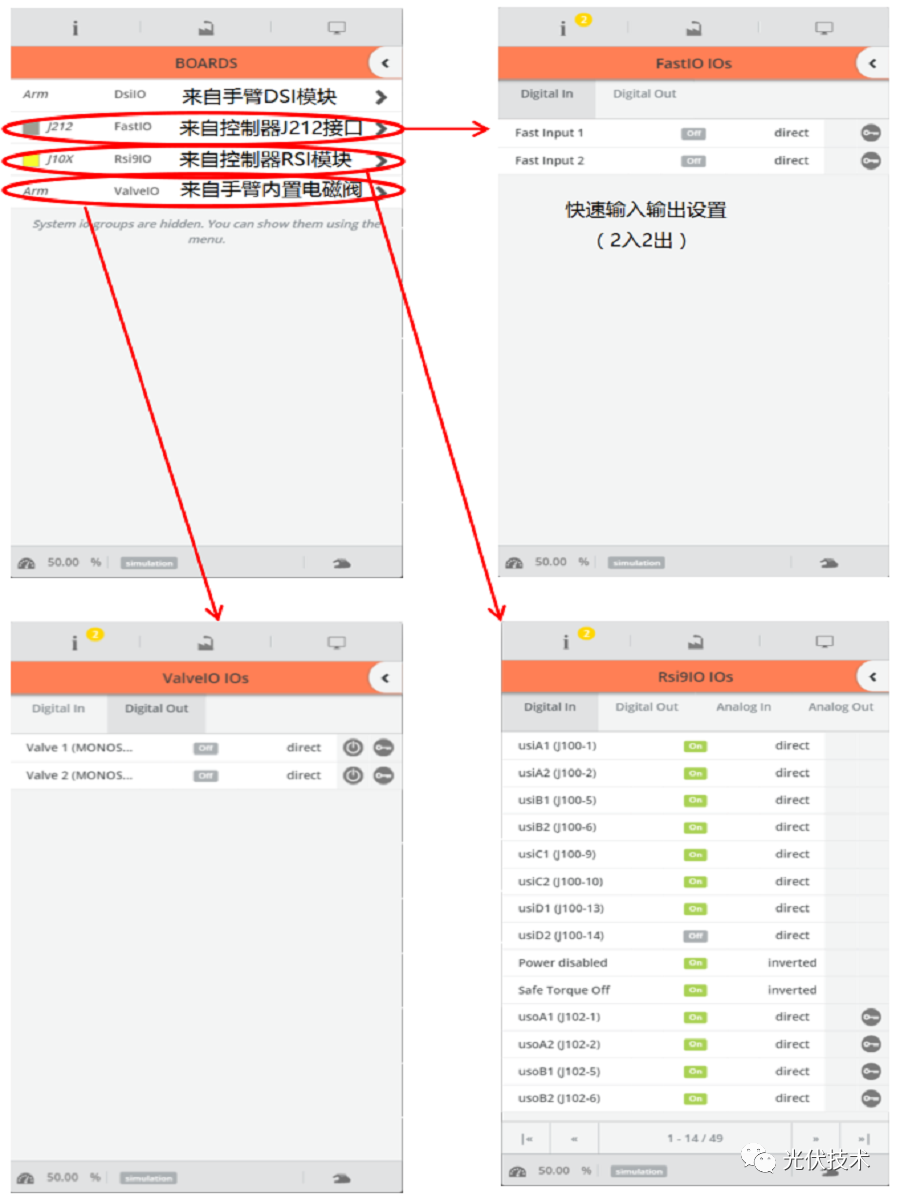
每一个分区里都将信号分为数字量输出、数字量输入、模拟量输入、模拟量输出四个分隔页单独显示,方便查找与管理。在通过配置或添加通信板卡的情况下,控制器可以获得更多的 I/O。
8. ROBOT 机器人调试
Robot 功能主要管理机器人的调试与安全功能,如手臂的零位校准、刹车释放、限位设置和安全状态监测。
a. 参考零位校准&相位校准
① 校准目的:
为了使驱动器与电机正常运行,当编码器位置为空时,电机相位必须与电机磁体对齐,相位偏移调整的目地是初始化编码器参考位置。
② 产生问题:
当电机相位偏移不理想时,电机无法以最佳状态被控制,并导致电机扭矩的损失。如果电机相位偏移存在错误,甚至可能会导致不安全的情况,此时电机无法由驱动器控制(一旦通电就不稳定)。
③ 注意事项:
调整电机相位需要使用相关权限,并且在开始执行之前,必须确保目标轴不受重力影响(通过外部支撑)。
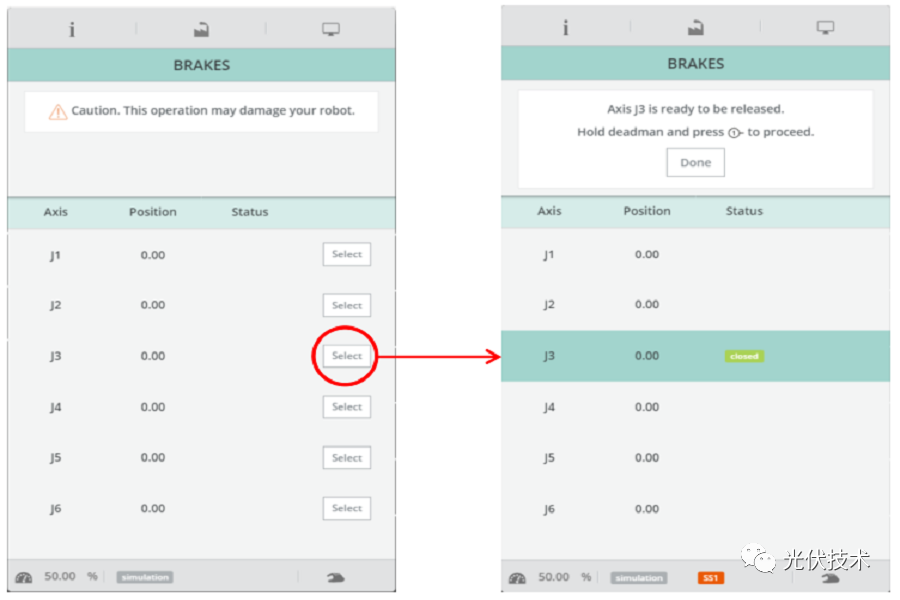
b. 刹车释放
刹车释放功能需要手臂在下电的情况下经行,并且为保证操作人员安全,只能逐一进行单轴释放。
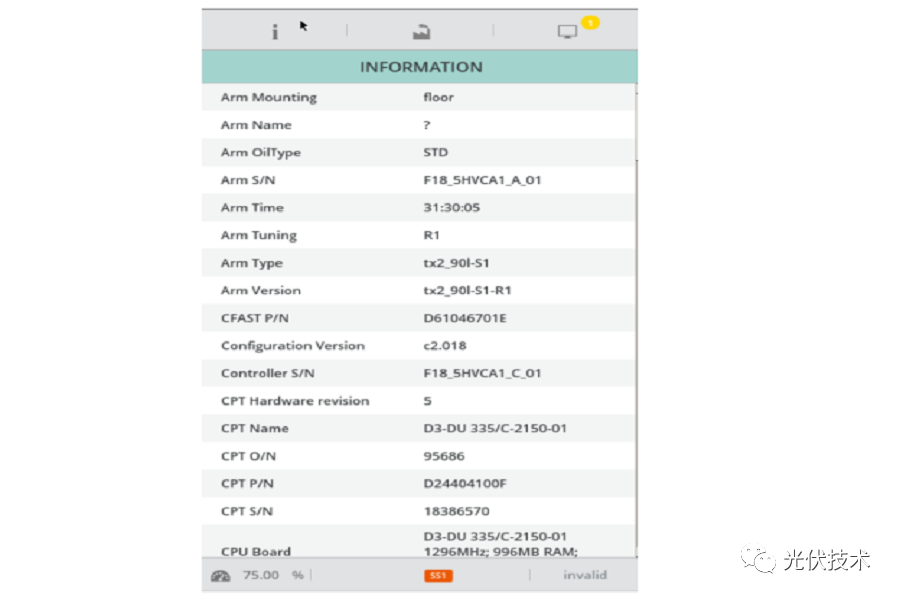
c. 机器人信息
包含了当前手臂及控制器的版本信息,以及软硬件配置信息。
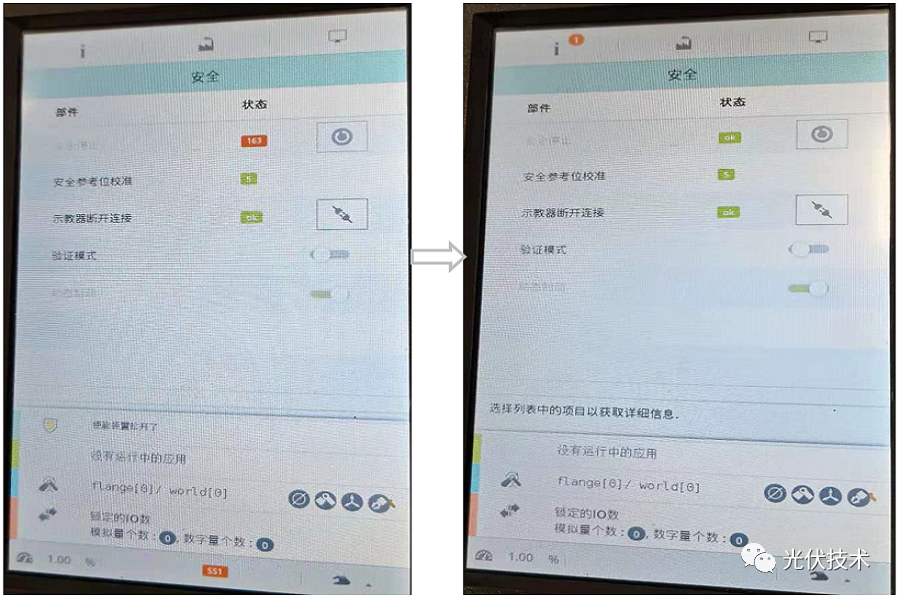
d. 安全状态
安全功能可对安全状态进行恢复,监测安全参考位的设置情况,以及控制示教盒的通断情况。
9. Setting 设置
Setting 管理控制器的基础设置功能。
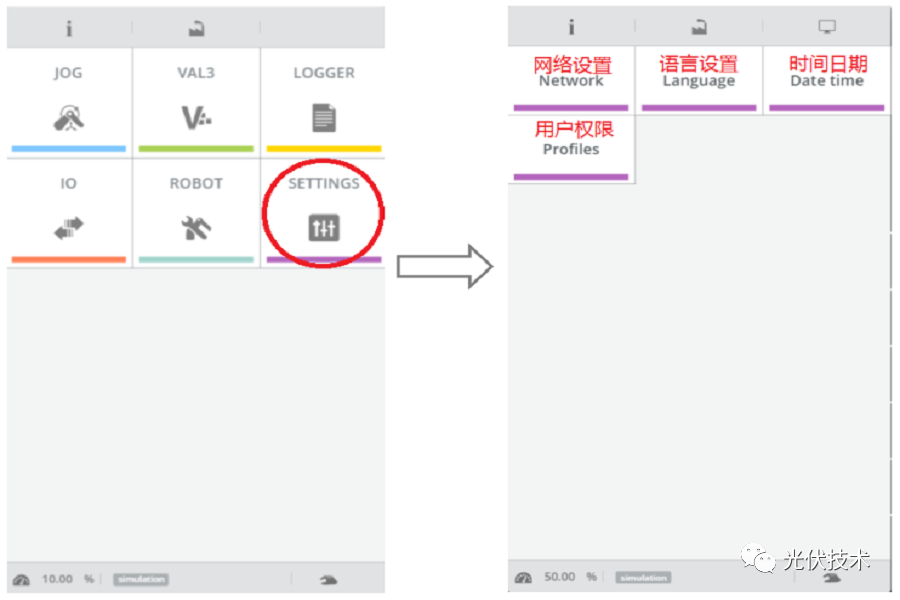
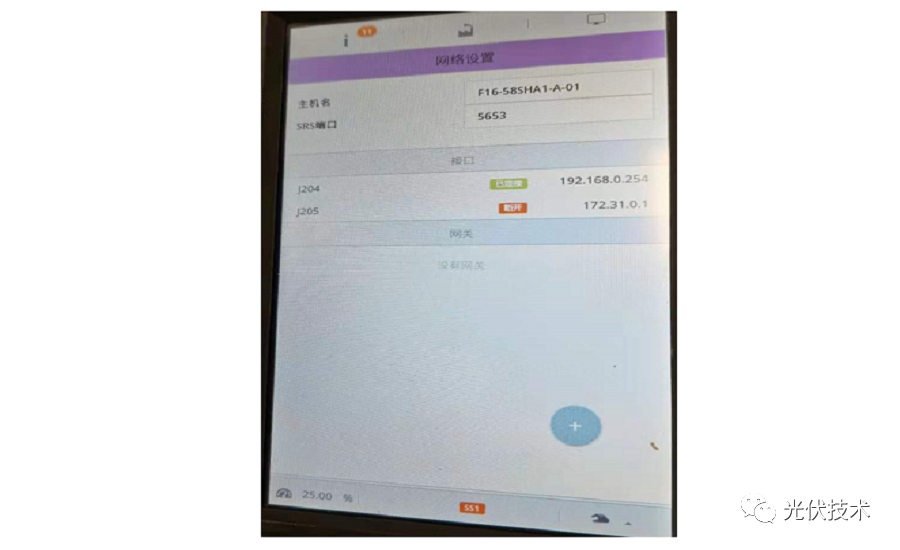
a. 网络设置
J204 与 J205 是两个独立的以太网端口,IP 地址可由用户自定义或动态获取,并支持用户创建网关。
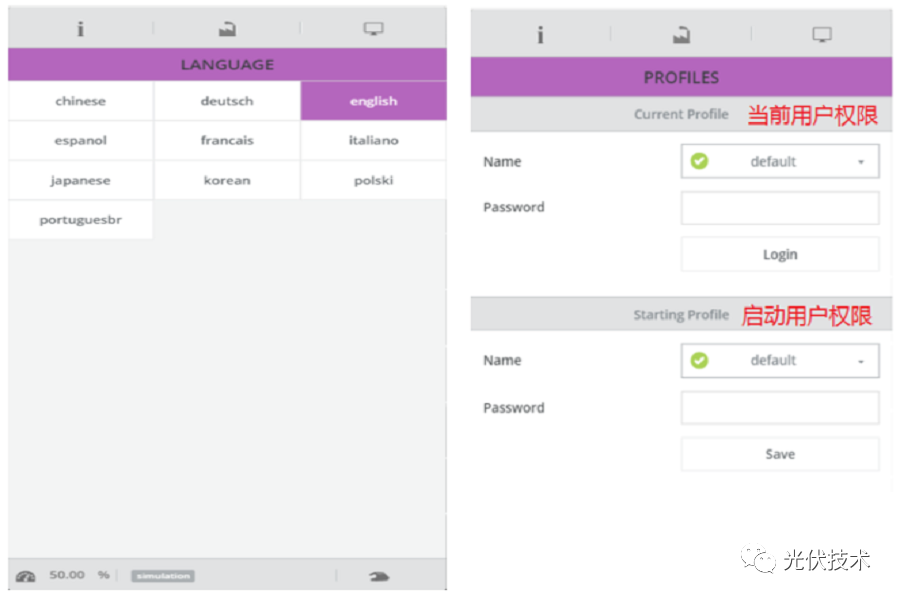
b. 语言设置及登录权限
审核编辑:黄飞
-
ABB工业机器人应用常见故障九问九答2017-08-07 4388
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8006
-
ABB机器人示教器控制器常见故障维修2020-10-12 2247
-
KUKA机器人伺服驱动模块维修2021-09-17 1870
-
ABB机器人伺服电机维修常见故障是什么?2021-09-29 2997
-
ABB焊接机器人伺服电机维修常见故障有哪些?2021-09-30 2338
-
库卡机器人伺服电机维修常见故障现象有什么?怎么维修?2021-11-12 4760
-
示波器常见故障及维修2016-05-05 1893
-
史陶比尔公司推出适用于汽车行业的激光切割机器人2018-01-23 5776
-
为什么说史陶比尔机器人是全球领域的工业机器人领先者之一?2018-08-24 7234
-
史陶比尔面向机器人推出两款连接器新产品2018-10-06 549
-
除工业机器人和纺织机械产业外 史陶比尔还提供先进的连接器解决方案2019-03-27 1397
-
ABB机器人常见故障处理方法2019-04-28 46125
-
史陶比尔推出新一代AGV-CC6充电连接器2023-10-25 1736
-
码垛机器人常见故障及维修方案2023-11-08 2896
全部0条评论

快来发表一下你的评论吧 !
