

智驾、座舱、泊车三合一域控制器解析
描述
用双Orin打造智驾、座舱、泊车三合一域控制器,硬件上难度不大,难度都在软件上。今天我们就来看看国内某大厂的智驾、座舱、泊车三合一域控制器。
那么将智驾、座舱、泊车三合一,能不能算中央计算Zonal的E/E架构或者说软件定义汽车?也不能算,中央计算Zonal的E/E架构不仅是要把智驾、座舱、泊车三合一,还要把动力底盘、车身、座椅等等所有需要一定规模计算资源的系统都集中在一个计算单元内,这个计算单元不一定是单芯片,可以是两个芯片或四个芯片,芯片间至少需要超过100GB/s的PCIe交换机连接。而中央计算单元与各Zonal区域的连接是至少10Gb/s的骨干车载以太网。各Zonal需要能运行小型虚拟机的MCU,也可以在边缘部署10Base-T1S车载以太网,或许可以省掉一些昂贵的MCU。
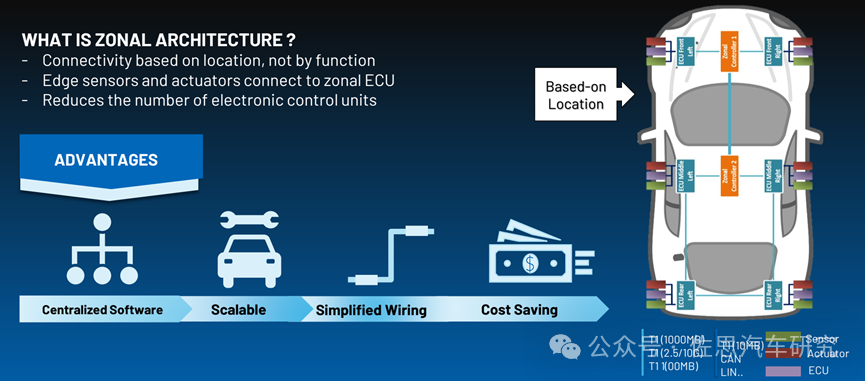
图片来源:ADI
Zonal架构差不多就是全以太网架构,当然,摄像头和显示面板恐怕还是需要MIPI CSI或DP的SerDes。以目前车厂的迭代速度,要想进行到软件定义汽车或者说Zonal E/E时代恐怕需要十年以后。目前,交叉域控制器都已经是先进的E/E架构了,以太网在E/E架构里只是点缀,CAN还是绝对主流,要想用以太网取代CAN,还需要至少五年的时间。CAN与以太混合网络,CAN是典型的信号导向,以太网是服务导向,混合网络需要多个网关,软件工作也很麻烦,最完美的E/E架构应该是全以太网,有少量SerDes。
图片来源:网络
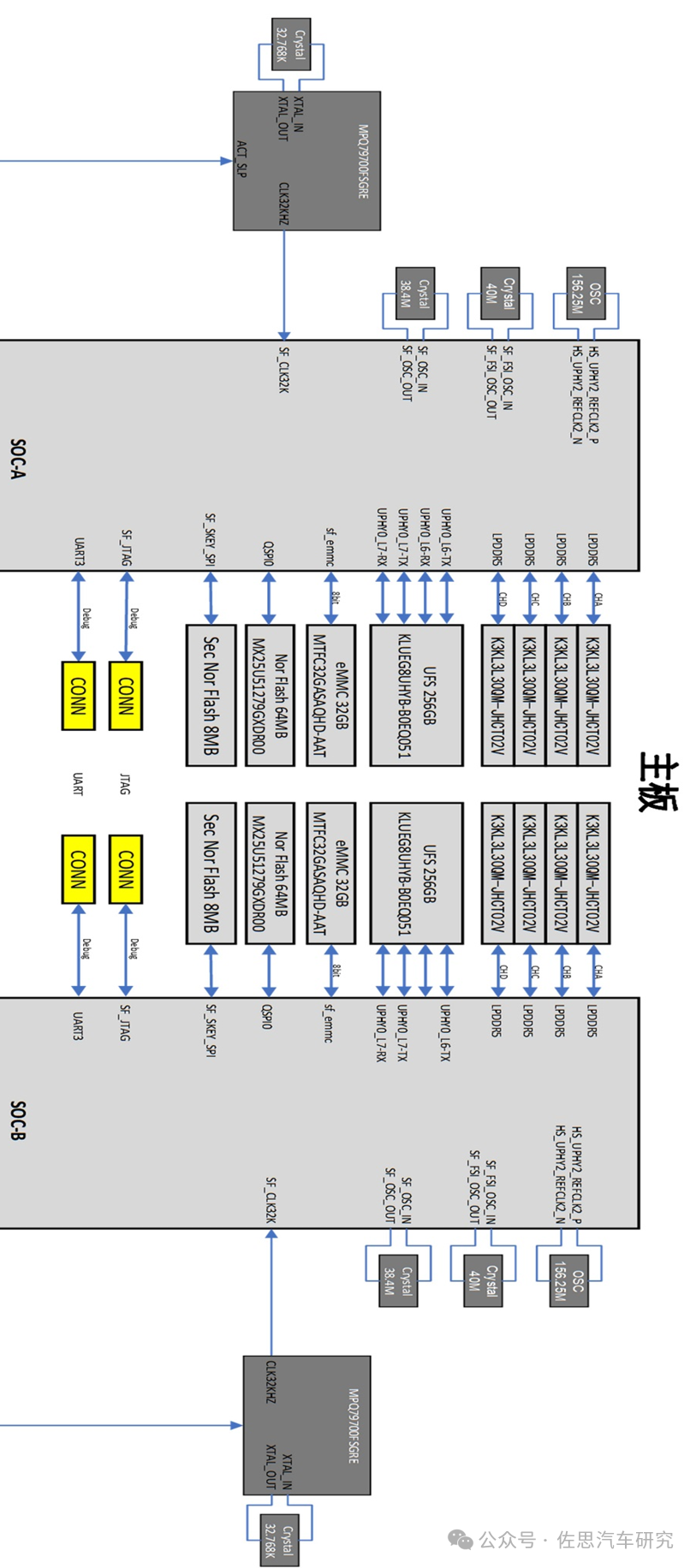
让我们回到现实,看看这个智驾、座舱、泊车三合一架构,上图是核心板部分,两颗Orin的外围包括DRAM、UFS、eMMC、串行Nor Flash和安全控制Nor Flash,因为功能多,外围元件要尽量强大,DRAM选择三星的LPDDR5X,即K3KL3L30QM,速率为7500Mbps,容量为8GB,最近8533Mbps的LPDDR5X也已经量产,可以升级为K3KL3L30CM-BGCU,最高8533Mbps,或者把容量加大到12GB,即K3KL4L40DM-BGCU,速率也是8533Mbps,Orin支持LPDDR5X,高通的SA8255/SA8295最高只支持LPDDR4X。目前量产的车载SoC只有英伟达的Orin和安霸的CV3支持LPDDR5X,蔚来的神玑也支持。目前三星的LPDDR5X温度范围都是-40℃-+85℃,美光的是-40℃到+95℃,略高10度,美光的型号为MT62F1G64D4EK,也能到8533Mbps。
UFS选3.1,目前主流的是UFS2.1,车规版UFS3.1在2023年初刚量产,UFS2.1最大读出速度为850MB/s,UFS3.1是1700MB/s,UFS2.1最大连续写入是260MB/s,UFS3.1是1400MB/s。UFS选择的是三星的KLUEG8UHYB-B0EQ051,支持AEC-Q100 Grade 2,最高连续读出速度是2000MB/s,连续写入是700MB/s,对车机来说读出比写入重要,这是为车机优化的UFS芯片。eMMC选择的是美光的MTFC32GAZAQHD-AAT,容量32GB。Nor Flash选择台湾省旺宏的MX25U51279GXDR00,是2023年6月的新产品,采用多I/O设计,最高速率在400Mbps以上。
添加一个电源排序系统,即MPQ79700FS,这是一款MPS的 12 通道功能安全电源定序器,专为汽车高级驾驶辅助系统 (ADAS) 和自动驾驶平台而设计,可为整个平台提供必要的控制和电源排序。MPQ79700FS 包含一个晶体驱动器、一个带报警功能的实时时钟 (RTC)和一个可通过 I2C 接口访问的可配置监控器(watchdog),同时提供低电平有效系统复位和中断输出。MPQ79700FS集成内置自检 (BIST) 等安全机制,以实现高诊断覆盖率,使系统达到目标 ASIL 等级。它基于 MPS 先进的 MPSafe 功能安全产品开发流程而开发。该流程已通过独立认证,符合 ISO26262标准。
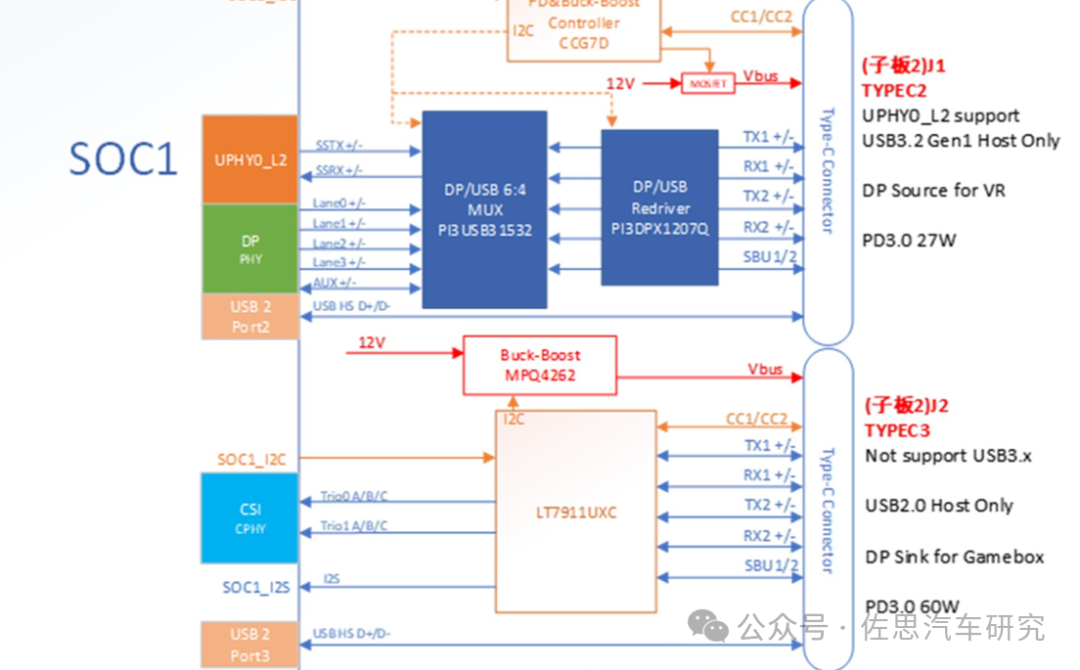
双Orin自然使用双安全MCU,一般都选择英飞凌的TC397。座舱系统需要大量TypeC接口,特别是新型座舱,需要考虑玩AR/VR游戏,玩外接游戏盒子,还有后排甚至三排都需要TypeC接口充电,以及各种笔记本电脑或平板电脑充电。
图片来源:网络
只能用Orin的DP口和CSI口做转换。
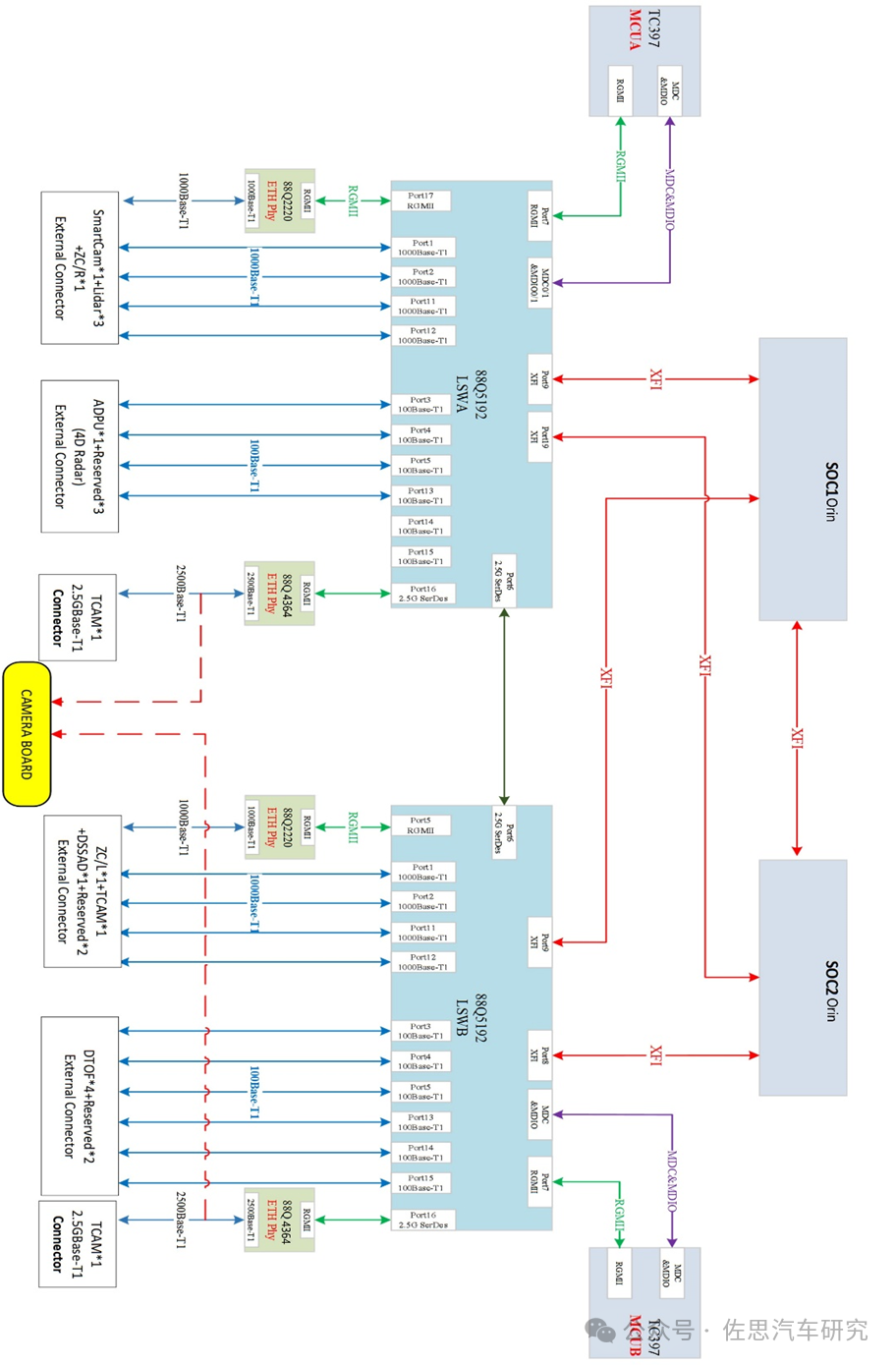
以太网部分。图片来源:网络
有三个激光雷达接口,且都是千兆级,目前99%都是百兆级的,激光雷达是有冗余接口,4D毫米波雷达接口4个,百兆级足够,TCAM即Telematics and Connectivity Antenna Module,也就是T-BOX,考虑到V2X,需要最高的2500兆级别,总共3个T-BOX,其中一个用于OTA升级,只需要千兆即可。DTOF是直接TOF摄像头,也可以是Flash激光雷达,推测是Flash角激光雷达的可能性更高,考虑到技术变换很快,预留了足够多的接口。DSSAD即 Data Storage System for Automated Driving。翻译过来就是自动驾驶车辆的数据存储系统。EDR侧重于发生事故(主要是车辆速度剧烈变化引起EDR装置启动记录),DSSAD则是分清责任是自动驾驶系统,还是驾驶员本人。ADPU即自动驾驶导航单元,ZC/R是右侧Zonal控制,不过我很怀疑车侧的区域网络大部分是CAN,最高不过CAN-FD,99.9%的情况下速率都不超过5Mb/s,用千兆以太网严重浪费,从下面的MCU接口看,应该只是预留,没有使用。
选用目前最先进最强大的以太网交换机,Marvell的88Q5192,这是Marvell第三代安全汽车以太网交换机。88Q5192是一款16端口以太网交换机,是目前端口数量最多的以太网交换机,且集成了1000BASE-T1、100BASE-T1和10BASE-T1S PHY,完全符合适用的IEEE 802.3标准。这款16端口以太网交换机提供12个集成PHY,4个支持双速1000/100BASE-T1,6个支持双速100/10BASE-T1(S),2个支持100BASE-T1/TX。支持的其他接口包括2个多速10Gb SerDes(10G/5G/2.5G/1Gbps),2个多速2.5Gb SerDes(2.5G/1Gbps),2个RGMII/MII/RMII,和2个PCIe Gen3 x1接口。端口接口选项为连接外部设备提供了灵活的配置,如2.5/5/10GBASE-T1 PHY,或上行链路到主机SoC。这使该器件成为车内网络(IVN)应用的理想选择,如驾驶辅助系统(ADAS)、区域控制模块和中央网关。这款交换机包括一个高性能的双核ARM R52 CPU,该CPU以锁定方式运行,有专用的片上存储器来支持时间敏感网络(TSN)协议,如准确时间协议(PTP)和安全防火墙,以防止外部恶意攻击。该交换机包括许多先进的安全功能,包括802.1AE MACsec,提供链路安全以防止中间人攻击,拒绝服务(DoS)引擎,用于深度数据包检查(DPI)的TCAM,以及信任启动功能以确保车辆网络的安全。它还包括一个嵌入式硬件安全模块,通过支持安全和加密启动以及管理MACsec等安全功能来增强设备安全。
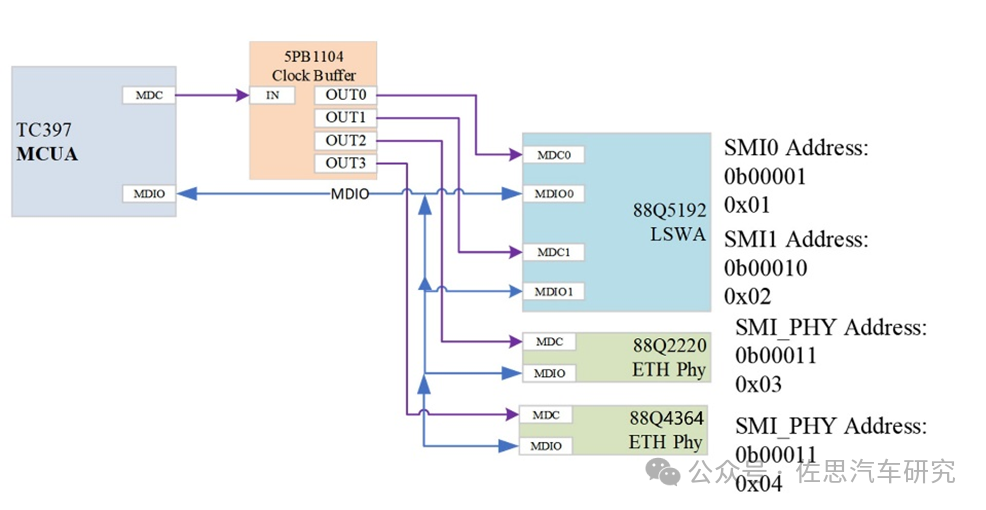
图片来源:网络
上图是一个MCU的以太网结构,以太网物理层选用的也是目前最强的以太网物理层即Marvell的88Q4364,88Q4364设备是一个单对以太网物理层收发器(PHY),支持屏蔽双绞线(STP)上的操作。收发器实现了IEEE 802.3ch标准定义的2.5G/5G/10GBASE-T1的以太网物理层部分。88Q4364集成了MACsec,可防止第2层车内网络安全威胁。MACsec在逐跳的基础上保护数据交换,并防止入侵、中间人攻击和重放攻击等攻击。最高达万兆级别,10G/5G/2.5G USXGMII、10 Gbps XFI、5 Gbps XFI/2、2.5 Gbps 2500BASE-X或2.5 Gbps ,OCSGMII接口直接连接到汽车级图形处理单元(GPU)、CPU、以太网交换机和电子控制单元(ECU),以支持车载网络(IVN)所需的操作和网络速率。
图片来源:网络
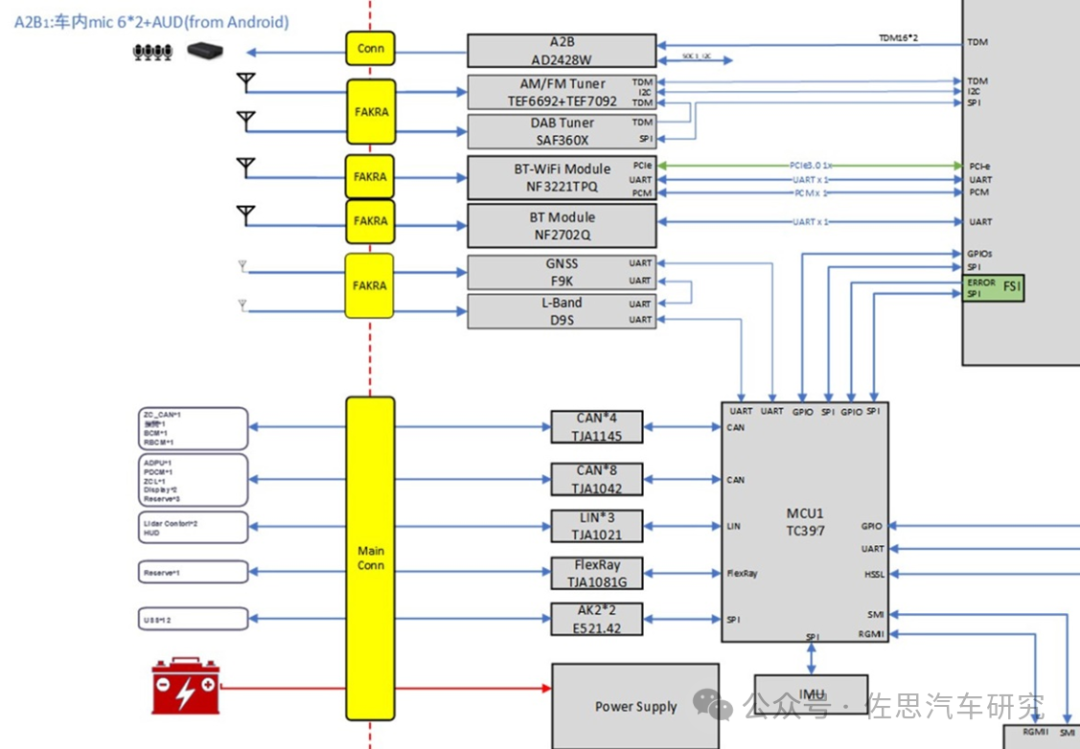
收音、蓝牙和MCU部分,收音方面考虑到出口,DAB是少不了的,SAF360X是DAB数字收音调谐头,车内麦克风众多,三排都要有,自然离不开ADI的A2B总线收发器AD2428。GPS选择u-blox的F9K,它可以支持 L1/L2/E5B 和 L1/L5 频段,充分提高了灵活性、卫星信号可用性和安全性。ZED-F9K-01A 将多频段、多星座全球导航卫星系统 (GNSS) 技术与惯性导航高精度 RTK(实时动态)相结合,实现分米级精准定位。u-blox ZED-F9K-01A 原生支持 u-blox PointPerfect GNSS 增强服务,可以并行提供多路 GNSS 和 IMU 输出,为各种可能的架构提供支持,包括具有超低延迟、50 Hz惯导位置输出。为高精度定位还需要D9S,这是L波段卫星接收,D9S使用SSR SPARTN数据格式通过卫星 L-band 频道接收校正数据。该模块使用加密技术安全地提供PPP-RTK GNSS 校正数据,包括由u-blox PointPerfect 服务提供的数据。还有一款D9C,利用免订阅厘米级增强服务(CLAS) 通播,该通播由日本QZSS(准天顶卫星系统)星座通过L6频段频道在日本本土提供服务,能提供厘米级定位服务,在我国广东东部,QZSS还是可以用的,信号差点,目前免费,将来肯定会收费。
Flexray没有必要,未来的潮流趋势应该是以太网,Flexray只有奔驰、宝马、奥迪和沃尔沃用于底盘部分,价格偏高,协议复杂。主连接器也连接了12个超声波传感器,通过SPI接口。TJA1042接车身控制器即ZC/R和ZC/L,还连接了ADPU、车身、和动力域。
图片来源:网络
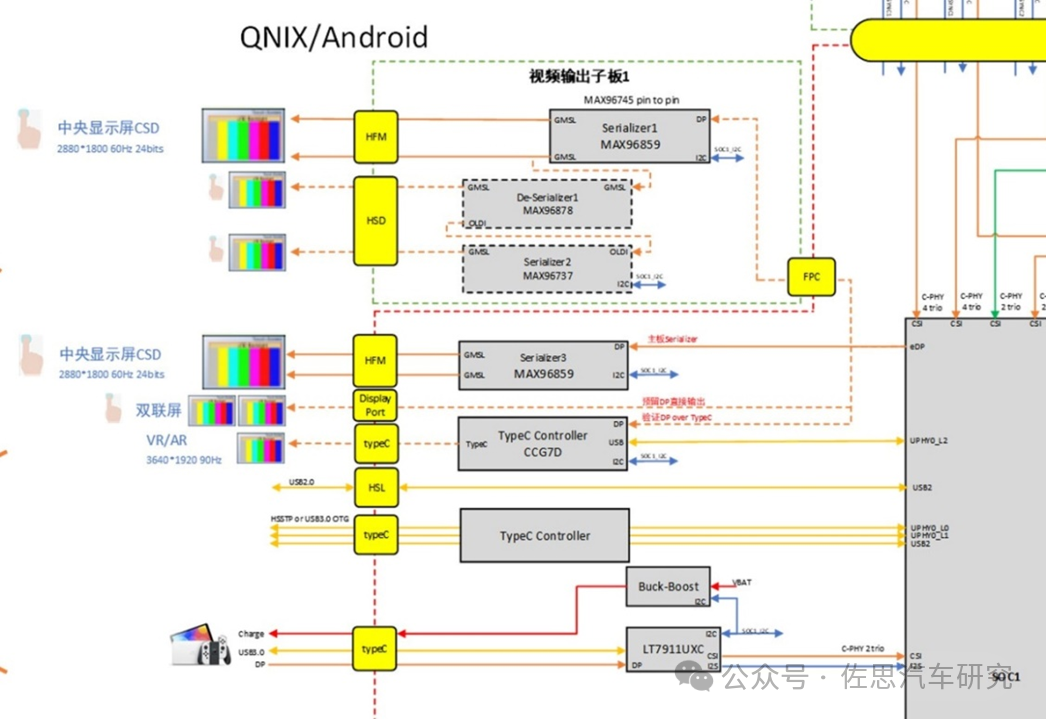
视频输出、USB和TypeC部分,可以用Orin的DP直接输出一路,做车机与仪表双联屏,做4K显示完全没问题,再附加一路附加屏,用Orin的eDP输出,经过ADI的MAX96589串行器,MAX96589支持两路MST,也就是可以输出两个显示屏,一个副驾屏,再加一个中央显示屏,或者两个后排屏。
图片来源:网络
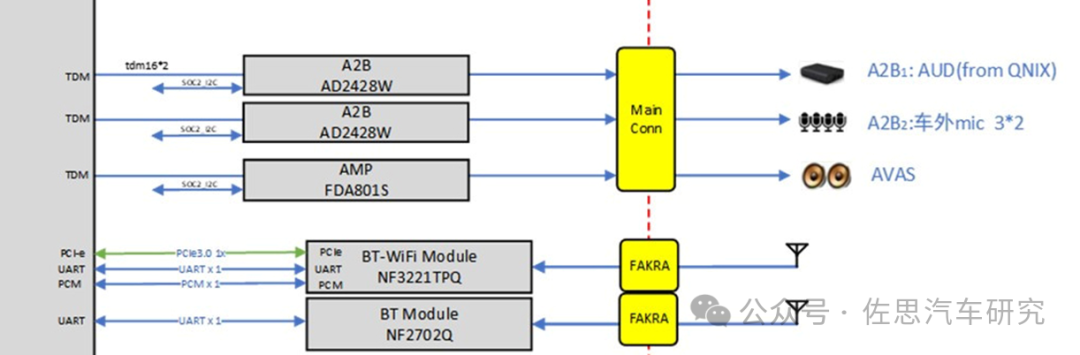
音频、蓝牙和WiFi,这里的音频放大低档了点,可能是考虑到有外置音频功率放大,蓝牙需要两个,后排也有蓝牙通话的需要。

图片来源:网络
这是摄像头板,以800万像素摄像头高速无损无延时传输要求为例,一般为3264*2448=7990272个像素点。按照RGB三色24bit,摄像头30帧计算,该摄像头每秒产生的数据量约为7.68Gbps带宽。摄像头的数据格式,通常由RAW RGB、YUV两种。YUV常见的有三种级YUV444,YUV422和YUV420。其中,YUV444是像素X帧率X比特X3,即5.76Gbps;YUV422是像素X帧率X8比特X2,即3.84Gbps;YUV420是像素X帧率X8比特X1.5,即2.88Gbps。ADAS通常对色彩考虑不多,YUV420足够,当然还可以再压缩一下,不过笔者认为还是不压缩的好,并且有可能将来色彩也需要考虑,因此4个800万像素是11.52Gbps,用MAX96712也可以,不过像AR0820这样是830万像素,有点勉强了,目前最顶级的车载摄像头图像传感器是索尼的IMX735,有效像素高达1742万像素,一个就需要6.27Gbps的带宽,而MAX96712的总带宽才6Gbps。再有就是考虑高速场景,帧率最好高一点,40Hz或45Hz,带宽又会增加不少,所以这里用ADI目前最顶级产品MAX96792,可以支持12Gbps带宽,但MAX96792是两摄像头输入的,因此需要两个。这里的4个360环视也用了800万像素,完全没必要,可以降级为400万像素或200万像素,这样用MAX96712就轻松多了,当然如果用800万像素,MAX96712也勉强可以。
智驾、座舱、泊车三合一,两个Orin是有些吃力的,大部分时候恐怕是一个Orin负责座舱,一个负责智驾,虽然用了最顶级的以太网交换机,但带宽最高不过1.25GB/s,应该加上一个PCIe 交换机,如Microchip的PM43036B1,支持36lanes,Orin的PCIe是4代,最高是每Lane是2GB/s的带宽,可用的Lane是16通道,最高也就是32GB/s,这个带宽不足以让Orin能有级联翻倍的效果,毕竟NVLink最新的有900GB/s,但总比以太网要好得多。当然这个架构设计已经是全球范围内最先进的了。
审核编辑:汤梓红
-
三合一老化试验台,三合一老化测试案例2024-04-07 1539
-
三合一筋膜枪功能说明2024-01-12 1173
-
高性价比三合一移动电源设计技术2023-11-08 526
-
三合一智能音箱演示2023-03-15 609
-
连拓精密科技为客户定制三合一控制器水道气密充气工装2023-01-05 1474
-
移动电源三合一方案解析_移动电源三合一方案的优点介绍2017-12-29 15669
-
新人提问:移动电源方案软件三合一好还是硬件三合一好?2015-10-23 4305
-
移动电源硬件三合一方案和软件三合一方案对比2013-10-21 5558
-
同步整流 移动电源三合一问题2013-09-18 9755
-
移动电源方案究竟硬件三合一还是软件三合一?2013-09-15 14616
-
LabVIEW边干边学系列三合一2012-08-12 3099
-
三合一(温湿光)传感器设计2011-07-16 5213
全部0条评论

快来发表一下你的评论吧 !
