

KUKA C4/C58.6以上系统的工具/基坐标管理窗口
机器人
描述
工具/基坐标管理窗口 - “概览”区域
“概览”区域中显示所有现有的 TOOL、BASE 和外部运动系统,分别在一个单独的选项卡中。
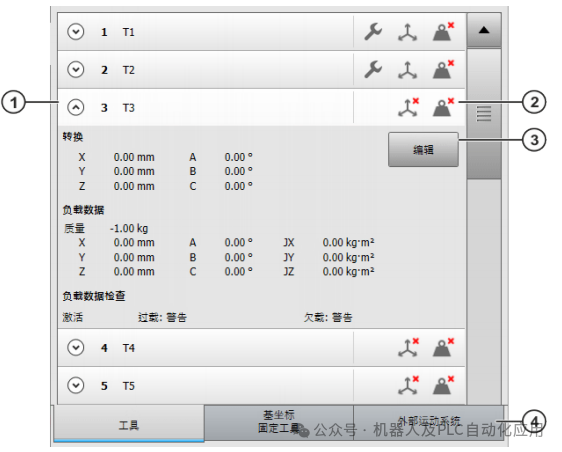
这里以工具选项卡为例对“概览”区域进行说明。其他选项卡的结构类似。
| 1 | 工具列表。通过触摸可以展开条目。 |
| 2 | 图标显示关于测量状态的信息。触摸某个图标时,也会显示文本信息。 |
| 3 | 打开该工具的“编辑”视图。可以编辑数据。 |
| 4 |
用于在 TOOL、BASE 和外部运动系统之间切换的选项卡 提示:外部运动系统只能通过 WorkVisual 创建。 |
工具/基坐标管理窗口 - “测量”区域
测量方法概览
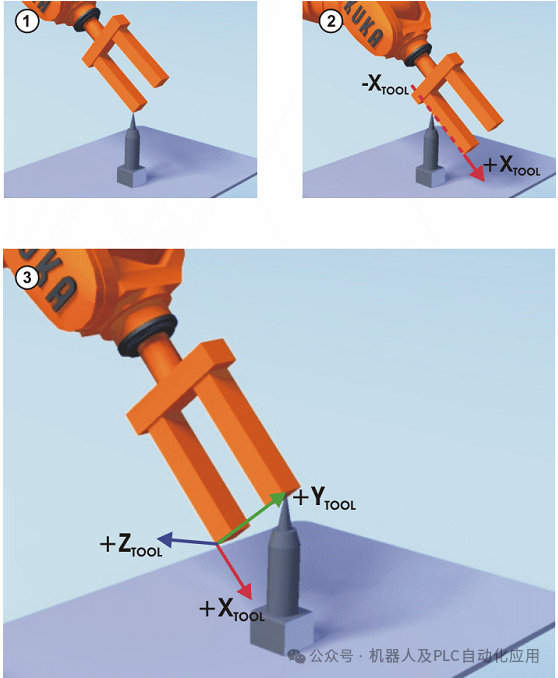
XYZ 4 点法
XYZ 3 点法
XYZ 参照法
XYZ
ABC 世界
ABC 2 点法
3 点
这里以 XYZ 4 点法法为例对“测量”区域进行说明。

| 1 | 对象信息,例如索引、名称 |
| 2 |
对要执行的操作的说明 视测量方法而定,此外还有其他信息或设置,例如用于选择参考工具的栏位 |
| 3 |
含有必要测量点的列表 如果一个点已经被保存,它的值会显示在这里。 |
| 4 |
当前测量的状态 一旦结果在公差范围内,结果也会显示在此处。 对于 XYZ 4 点法法,在此也显示可能的测量误差。该显示供参考。如果测量误差小于 5 mm 的最大允许测量误差,则可以保存测量。 |
| 测量 | 保存测量点 |
| 接近 (PTP) |
该按钮仅在列表中选中了一个已保存的点时才激活。 触摸按钮会显示以下信息:按下启动键以开始PTP 运动或选择“取消”。 在到达该点时,该信息隐藏并且显示“”。 |
表格显示不同参考系所使用的方法以及相应的测量对象。
XYZ 3 点法法
针对下列类型的运动系统测量工具:
• 四轴码垛机器人
• 激活了码垛模式的五轴码垛机器人
• 未来更多的运动系统,尤其是大多数四轴运动系统
如果使用相应的运动系统,则控制器会提供 XYZ 3 点法法。此时 XYZ 4 点法无法使用。
• 在选择方法后,必须用数字输入 TCP 与法兰平面的距离。
根据运动系统类型不同,它是 X 值或 Z 值。这一点在输入时并不重要,距离才是关键。
• 然后将待测量工具的 TCP 以 3 种不同姿态移动到一个参考点。参考点可以任意选择。默认情况下,各种姿态之间的距离必须分别至少为 15度。
控制器由此计算出 TCP 的其余值。根据运动系统类型不同,它们是 X和 Y 或 Y 和 Z。
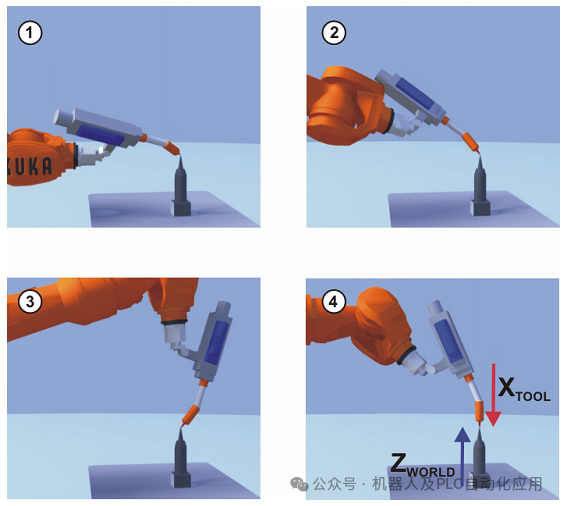
XYZ 参照法法
• 测量某个工具的 X、Y、Z
采用 XYZ 参考法时,首先使用已知的工具移向一个参考点,然后使用待测工具移向参考点。机器人控制器比较法兰位置,并计算出新工具的 TCP。
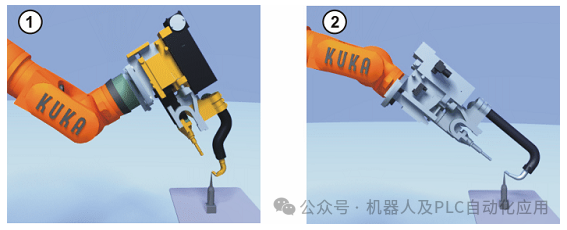
XYZ 法
• 测量固定工具的 X、Y、Z
用户将固定工具的 TCP 告知机器人控制器。为此将已测量的工具移动到TCP。

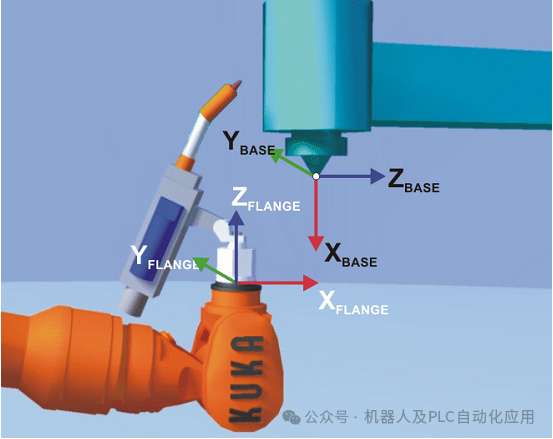
ABC 世界法
• 测量工具的作业方向
• 测量固定工具的作业方向
通常,在只需要确定作业方向,而其他轴方向不相关时,使用 ABC 世界法。
此方法有两种方式:
• 5D:只确定作业方向。作业方向默认为 X 轴。其他轴的姿态由系统确定,不受用户影响。
系统总是以相同方式确定其他轴的姿态。因此,如果以后必须再次测量工具,比如在发生碰撞后,重新确定作业方向就够了。无需考虑作业方向的旋转。
• 6D:原则上,用 6D 方式可以确定所有轴方向,而不仅仅是作业方向。但是,这不能达到与 ABC 2 点法法相同的精度。因此,在要确定所有轴方向时通常使用 ABC 2 点法。
工具:
用户将 TOOL 坐标系的轴与 WORLD 坐标系的轴平行对齐。机器人控制器由此得知 TOOL 坐标系的姿态。
固定工具:
用户将已测量工具的 FLANGE 坐标系与新坐标系平行对齐。机器人控制器由此得知固定工具的坐标系姿态。
ABC 2 点法法
• 测量一个工具的 A、B、C
• 测量一个固定工具的 A、B、C
在要确定所有轴方向而非仅作业方向时,使用该方法。
通过移动到以下点,机器人控制器得知 TOOL 坐标系的轴:
1. 原点
2. 负作业方向上的点(默认:X 轴)
3. XY 平面上 Y 值为正的点
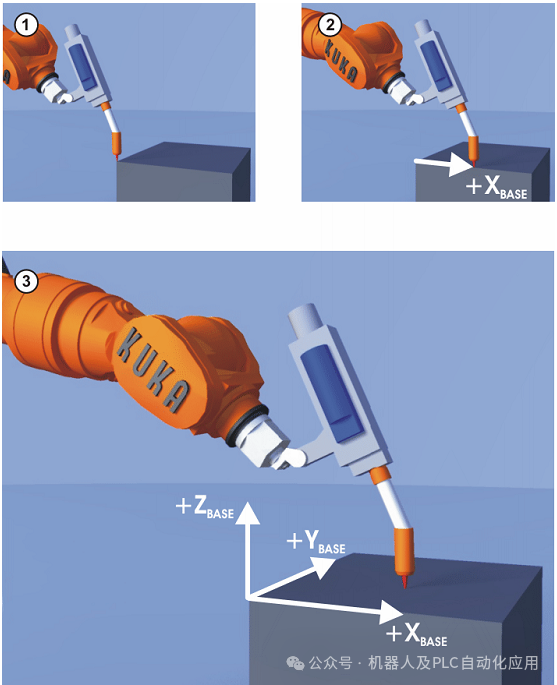
3 点法
测量一个基座的 X、Y、Z、A、B、C
审核编辑:黄飞
-
C4变身!小摩七彩虹C4!2018-10-29 9563
-
KUKA机器人问题解答2019-07-15 2628
-
用C#读取GPS数据的基类工具2010-02-08 887
-
【底盘大PK】雪铁龙C4 L/世嘉2018-07-12 5096
-
东风雪铁龙C4 L/世嘉底盘对比2018-06-27 18129
-
iDTronic的安卓RFID移动读取器C4 Red支持移动设备管理2019-01-11 1143
-
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载2019-04-22 5567
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2758
-
KUKA C4机器人轨迹BASE与TOOL坐标2020-05-10 8393
-
KUKA C4 安装工业以太网软件详细操作步骤2020-10-27 8721
-
KUKA C4机器人的轨迹BASE与TOOL坐标2020-12-23 7047
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9776
-
C4机器人与PLC的通信IO域更改扩展2023-01-03 1397
-
BPI-M5与Odroid C4和树莓派规格比较表2023-09-04 461
-
更改KUKA C 4 Windows系统的密码2023-12-12 3077
全部0条评论

快来发表一下你的评论吧 !
