

光学图像稳定原则
光电显示
描述
光学图像稳定或 OIS 是完美复制数字复制品的重要元素。如果没有这个,捕获静态图像和录制移动视频将导致像素模糊和出现不需要的伪影。虽然数码相机、数码摄像机、手机和平板电脑等数字捕捉设备变得越来越小,但它们对分辨率质量和像素计数密度的需求在过去十年中呈指数级增长。
市场向具有高百万像素捕获能力的紧凑型移动设备的转变产生了对先进稳定技术的需求。常见的实现方法有两种:电子图像稳定 (EIS) 和光学图像稳定 (OIS)。
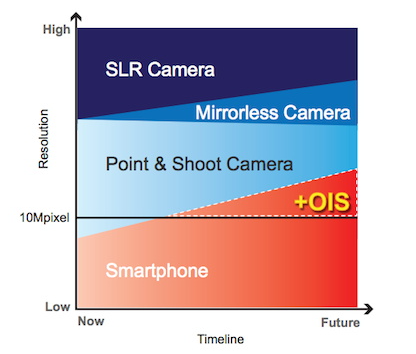
图1 光学图像稳定目标市场
稳定原则
图像稳定用于减少在图像传感器暴露于捕捉环境期间与相机的运动和/或晃动相关的模糊。然而,它并不能防止由目标拍摄对象的移动或相机本身的极端移动引起的运动模糊,只能防止用户对相机镜头的相对较小的晃动(在几个光学角度内)。这种相机用户运动的特征在于其平移和倾斜分量,其中角度运动分别称为偏航和俯仰。相机滚动无法补偿,因为“滚动”镜头实际上不会改变/补偿滚动运动,因此相对于图像传感器不会对图像本身产生任何影响。
EIS 是一种数字图像补偿技术,它使用复杂的算法来比较每个变化帧的帧对比度和像素位置。图像边界上的像素提供运动补偿所需的缓冲区。EIS算法计算每帧之间的细微差异,然后使用结果插入新帧以减少运动感。虽然这种方法的优点是能够创建廉价且紧凑的解决方案,但由于图像缩放和图像信号后处理伪影,终的图像质量总是会降低,并且需要更多的功率来进行额外的图像捕获和终的图像处理。图像处理。EIS 系统在全电子变焦(长视场)和弱光条件下也能发挥作用。
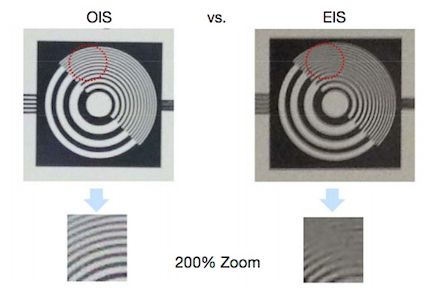
图2 OIS和EIS图像质量比较
OIS 行为
OIS 是成像设备中使用的一种机械技术,通过控制图像传感器的光路来稳定记录图像。紧凑型相机模块中 OIS 的两种主要方法是通过移动镜头位置(镜头移位)或模块本身(模块倾斜)来实现。
用户移动相机可能会导致聚焦镜头和图像传感器中心之间的光路未对准。在使用镜头移位方法的 OIS 系统中,仅控制相机模块内的镜头并用于将光路重新对准到图像传感器的中心。相比之下,模块倾斜方法控制整个模块的移动,包括固定镜头和图像传感器。模块倾斜允许 OIS 系统进行更大范围的运动补偿,的权衡是增加模块高度。由于镜头和图像传感器之间的焦距固定,因此通过模块倾斜也可以实现的图像失真。总体而言,与 EIS 相比,OIS 系统可以在不显着牺牲图像质量的情况下减少图像模糊,特别是对于弱光和远距离图像捕获。
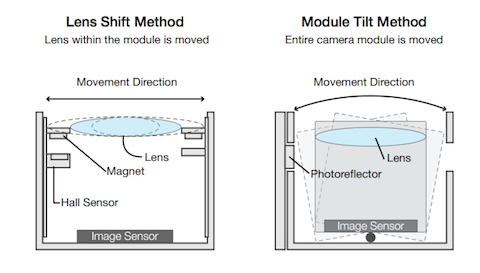
图3 OIS补偿的主要方法
ROHM的OIS架构
ROHM 提供两种 OIS 控制器架构,包括完全可编程的 ARM Cortex-M0 处理器,具有用于“陀螺仪信号处理”和“伺服控制”的定制可编程数字信号处理功能,以及 ROHM 的定制、完全可编程 RMCU 处理器,具有集成的可编程“陀螺仪信号”处理”和“伺服控制”。所有 OIS 工作存储器和控制计算均在 OIS 控制器本身上执行,无需外部主机处理器的计算能力或用于存储计算变量的外部存储器。这两种产品均实现了市场上的芯片尺寸、少的外部元件数量和的总体安装面积。
凭借在 OIS 架构方面业界的经验,ROHM 的 OIS 控制器系列可全面控制 X 轴和 Y 轴音圈电机 (VCM) 驱动器、霍尔放大器和电流驱动器、光反射器驱动器、I 2C 接口、PLL 振荡器、12 位 ADC、数字陀螺仪的 SPI 主接口(以及对模拟陀螺仪的支持)以及许多其他功能。该产品系列还包括支持自动对焦、中性密度滤镜或快门功能集成驱动器的选项。支持可选择的 PWM/BTL 线性操作,以选择改进的 VCM 驱动功率效率或改进的图像质量。此外,由于晶圆加工和优化的芯片架构,ROHM 的控制器具有同类的功耗。ROHM 专有的“伺服控制”和“陀螺仪信号处理”电路均采用独特的数字滤波器设计,可动态补偿陀螺仪和执行器温度漂移,同时不会消除相机用户有意的平移和倾斜运动。这些控制器可以应用于镜头移位、模块倾斜或其他不太常用的控制系统(例如镜头倾斜)。还包括可定制的 OIS 控制软件,用于自动镜头控制、自动云台检测以及访问不同的可编程拍摄模式和校准设置。
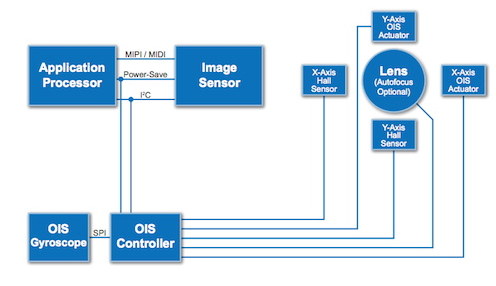
图 4 通用 OIS 框图
-
光学图像加密技术的优势分析2024-03-27 2182
-
光学图像信息传递系统概述2023-06-08 1489
-
用MATLAB进行当代光学图像处理(英文版)2021-03-22 831
-
意法半导体推出了光学图像稳定系统的2轴MEMS陀螺仪2019-10-04 1966
-
用于手机相机的光学图像稳定解决方案2019-07-22 2986
-
图像传感器类型2019-06-04 7779
-
ST推出全新陀螺仪,瞄准手机和相机图像稳定应用2018-10-17 774
-
ST推出全新的光学图像稳定陀螺仪,瞄准微型智能手机和数码相机市场2018-10-08 801
-
ZKM10080C立式快速光学图像测量仪的介绍和使用手册免费下载2018-09-21 1386
-
光学图像的多粒度感知算法2018-01-09 1139
-
光学图像的退化和恢复模型及其消模糊处理介绍2017-11-13 1730
-
图像传感器的分类及原理2016-08-05 31495
-
图像处理2012-07-20 10216
-
基于小波阈值理论的光学图像去云处理新算法2010-05-12 982
全部0条评论

快来发表一下你的评论吧 !
