

步进电机的结构特点
描述
步进电机(Stepper Motor)是一种电动执行机构,它能够将电信号转化为机械角位移。它的工作原理是基于电磁学原理,通过控制电流在电机线圈中的流动来产生旋转运动。步进电机广泛应用于各种自动化控制系统中,如数控机床、打印机、绘图仪等,因其具有良好的起停和反转响应、定位精度高、无累积误差等特点而受到青睐。
在提供的外观示例中,展示了HB(混合)型和PM(永磁)型步进电机的外形。这两种类型的步进电机在结构上具有区别,但它们共享一个关键特征:线圈固定而永磁体进行旋转。
具体来说,在HB型步进电机中,线圈通常围绕在电机外壳上,而永磁体则被置于转子内部。相比之下,PM型步进电机的线圈也位于外侧,但其永磁体安装在内侧的转子上。
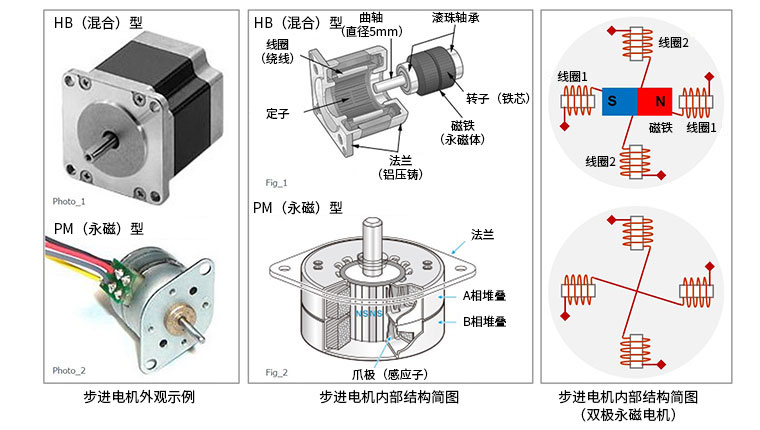
在展示的内部结构概念图中,我们可以看到一个采用两相线圈的PM型步进电机的例子。这种电机的设计使得当电流通过其线圈时,会产生足够的力矩推动永磁体转子转动。除了两相配置外,步进电机还可以设计为三相、五相等多相线圈的配置,这样做能够提高运动的平滑性和精确度。
步进电机的工作原理是通过改变定子绕组中电流的顺序来产生连续的磁场变化,从而推动转子步进旋转。这种操作通常通过电子控制器来实现,控制器按照特定的顺序给电机的各相绕组通电。
步进电机的控制方式主要有以下几种:
全步进:每次给两个相邻的绕组通电,使电机转动一个完整的步距。
半步进:每次只给一个绕组通电,或者同时给两个相对的绕组通电,使电机转动半个步距。
微步进:通过精细控制电流的大小,实现比半步进更小的步距,从而获得更平滑的运动和更高的分辨率。
步进电机的结构设计使其成为精确控制角度和速度的理想选择。通过改变绕组中电流的序列和大小,步进电机可以实现精确的位置控制和运动控制。
-
刹车步进电机的特点2025-04-25 1867
-
双极步进电机的结构和特点2024-06-20 2188
-
步进电机的原理及特点2024-01-18 5038
-
步进电机的结构及基本工作原理2023-08-29 4642
-
步进电机的特点与分类2022-10-30 2492
-
什么是步进电机驱动器?2021-07-07 1804
-
步进电机都有哪些分类?反应式步进电、永磁式步进电机、混合式步进电机各有什么特点?2020-12-26 6004
-
设计和实现机电式单相步进电机的原理详细分析2019-11-04 1464
-
什么是步进电机?步进电机的特点,分类与原理!2018-07-17 40467
-
基于PSoC3芯片的步进电机微步控制方案介绍2017-12-07 1125
-
基于PSoC3芯片的步进电机微步控制方案2011-01-13 805
-
步进电机的结构2009-05-06 10483
全部0条评论

快来发表一下你的评论吧 !
