

基于 GPU 渲染的高性能空间包围计算
描述
空间包围检测在计算机图形学、虚拟仿真、工业生产等有着广泛的应用。
现代煤矿开采过程中,安全一直是最大的挑战之一。地质空间中存在诸多如瓦斯积聚、地质构造异常、水文条件不利等隐蔽致灾因素,一旦被触发,可能引发灾难性的后果。因此在安全生产过程中有效的管理和规避各隐蔽致灾因素,有着重要的意义。
通过对煤矿地质空间中各地质因素建模,建立空间数据库,还原地下真实场景,使用计算机图形学进行空间计算,可以实时监测各隐蔽致灾因素的位置和距离,指导安全生产,并进行可视化展示。
空间包围检测有多种方法,比如基于包围盒的检测,三角面碰撞检测等。本文提出了一种基于 GPU 渲染的高效计算方法。
假定待检测球体范围的半径为r。两种检测方法如下:
方法 1:遍历模型所有的点,计算点和球心的距离。如果有距离小于 r,模型在球体范围内。
方法 2:以检测区域的包围盒为正交投影空间,渲染所有需要检测的模型。渲染过程中计算每个渲染点到球心的距离,如果有距离小于r的渲染点,模型在球体范围内。
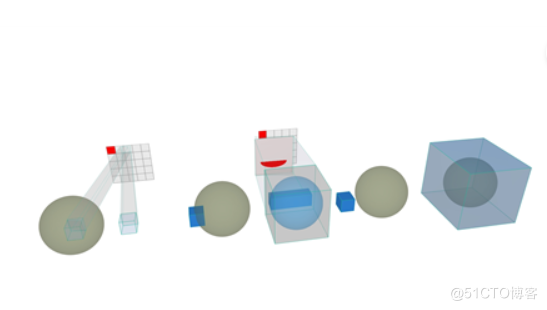
模型和检测区域有以下几种位置关系:

图 1:模型完全在球体范围内:方法 1 可检测
图 2:模型部分点在球体范围内:方法 1 可检测
图 3:模型点不在球体范围内,部分三角面在球形范围内:方法 2 可检测
图 4:模型不在球体范围内:方法 1 + 2 可检测
图 5:模型完全包含球体范围:模型如果是空心的,方法 1 + 2 可检测模型不在球体范围内。如果需要计算结果是模型在球体范围内,也就是模型是实心的,建模时需要在模型内部加上额外的辅助计算的三角面,用于表达内部信息。此时用方法 1 + 2 可检测模型在球体范围内。
以上方法使用 WebGL 渲染到纹理(Render To Texture) 和 readPixels 功能。图扑 HT for Web SDK 组件库对 WebGL 底层复杂操作做了封装, 为用户省掉了繁琐的底层 WebGL 操作,可以方便快捷的实现正交透视、渲染到纹理和异步 readPixels 等高级 WebGL 功能。
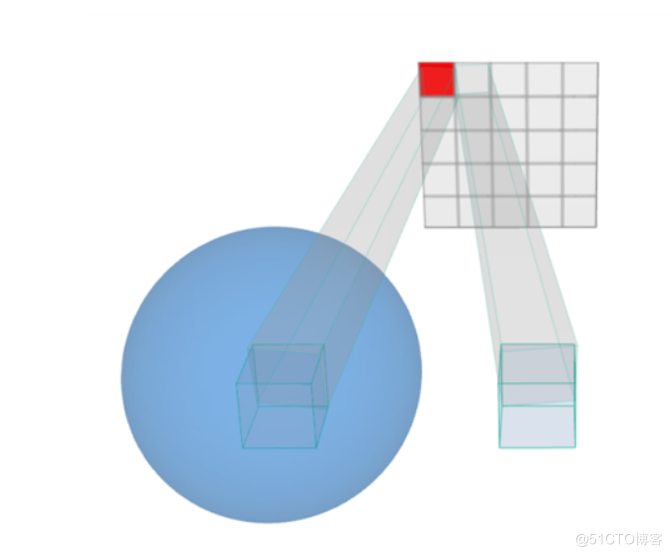
方法 1:点检测法
准备一张 N X N 纹理图 texture1(HT RenderTarget),保证要检测的模型的数量不大于 N X N。每一个模型在纹理上分配一个像素,像素的位置为 (x,y)。
创建点渲染模式着色器程序,实现以下功能:
顶点着色器:检测每个点到球心的距离,将距离是否小于r的信息传给片段着色器。指定的位置 (x,y) 赋给 gl_Position。
片段着色器:如果距离小于 r, 渲染红色,否则不渲染颜色。
JavaScript 程序遍历每一个待检测模型,将模型的顶点和模型在纹理上的位置 (x,y) 通过 attribute 和 uniform 传给顶点着色器。所有模型渲染结束后,使用异步 readPixels 将渲染结果读出来。通过判断读取结果里每个像素点颜色值,获得模型是否在球体内部信息。
主要代码:
// 创建渲染材质1
const texture1 = new ht.graph3d.RenderTarget(g3d, g3d.getGL(), 100, 100);
// 循环渲染所有的模型,结果保存到texture1。
for (let i = 0; i < nodeCount; i++) {
data = datas[i];
tModel = getDataMesh(data); // 获取模型网格信息
// 准备着色器数据
tModel.mat = model4.mat;
tModel.matDef[DEFAULT_MAT_NAME] = model4.mat;
tModel.mat.modelMat = data.getMatrix4().toArray();
x = i % 100;
y = Math.floor(i / 100);
model4.mat.uPos = [x / 100 * 2 - 1 + 1 / 200, 2 * y / 100 - 1 + 1 / 200];
// 渲染到texture1
g3d.setViewport(gl, 0, 0, 100, 100);
g3d.renderModel(texture1, model4, {
clear: false
});
}
// 读取检测结果
texture1.readPixelsAsync(0, 0, 100, 100, null, (result) = > {
for (let y = 0; y < 100; y++) {
for (let x = 0; x < 100; x++) {
// 遍历像素点,检测是否是红色
// ......
}
}
});
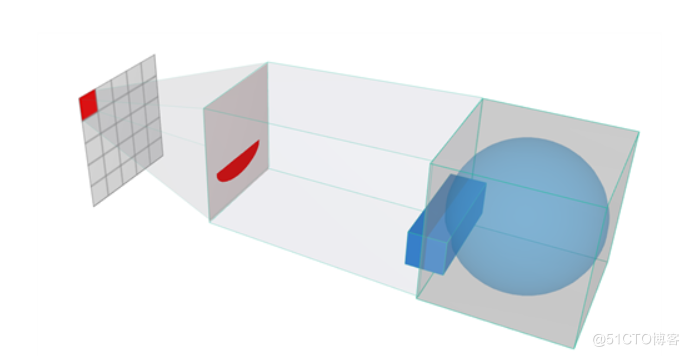
方法 2:面检测法
准备两张纹理贴图 texture1 和 texture2。Texture1 的要求同方法 1。Texture2 默认使用 1000 X 1000 的分辨率。
创建两套着色器。第一套着色器使用三角面渲染:
顶点着色器:正常计算顶点投影信息
片段着色器:检测每一个点到球心的距离,如果小于 r,渲染红色
第二套着色器使用点渲染:
顶点着色器:根据输入的 texture2 坐标(attribute),使用 texture2D 获取对应位置的颜色值,如果是红色,表示模型在球体内部,将此信息传给片段着色器。模型在 texture1 上的位置信息 (x,y) 赋给 gl_Position。
片段着色器:如果距离小于 r, 渲染红色,否则不渲染颜色。
JavaScript 程序遍历每一个模型,使用着色器 1 将结果渲染到 texture2。渲染过程使用正交透视矩阵,视锥是球体的包围盒。JavaScript 将 texture2 (uniform sampler2D)、texture2 每个像素的 x, y位置信息 (attribute)、模型在 texture1 上的位置信息 (uniform) 传给顶点着色器 2。片段着色器 2 将模型是否在球体内的信息渲染到 texture1。所有模型渲染结束后,使用异步 readPixels 将渲染结果读出来。通过判断读取结果里每个像素点颜色值,获得模型是否在球体内部信息。
主要代码:
// 创建渲染材质1,2
const texture1 = new ht.graph3d.RenderTarget(g3d, g3d.getGL(), 100, 100);
const texture2 = new ht.graph3d.RenderTarget(g3d, g3d.getGL(), 1000, 1000);
// 循环渲染所有的模型到texture2。texture2信息渲染到texture1
for (let i = 0; i < nodeCount; i++) {
data = datas[i];
tModel = getDataMesh(data); // 获取模型网格信息
// 准备着色器1数据
tModel.mat = model2.mat;
tModel.matDef[DEFAULT_MAT_NAME] = model2.mat;
tModel.mat.modelMat = data.getMatrix4().toArray();
// 渲染到texture2
g3d.setViewport(gl, 0, 0, 1000, 1000);
g3d.renderModel(texture2, tModel, { clear: true });
// 准备着色器2数据
model3.mat.uImage = texture2.texture;
x = i % 100;
y = Math.floor(i / 100);
model3.mat.uPos = [x / 100 * 2 - 1 + 1 / 200, 2 * y / 100 - 1 + 1 / 200];
// 渲染到texture1
g3d.setViewport(gl, 0, 0, 100, 100);
g3d.renderModel(texture1, model3, { clear: false });
}
方法 1 简单快速。但检测结果不准确。方法 2 检测结果准确,但计算过程复杂。实际使用中两种方法结合使用。首先使用方法 1 检测。对于不在球体范围内的模型,再使用方法 2 检测。
如果需要检测椭球体范围或者长方体的范围,可以获取椭球体或长方的变换矩阵,计算获得逆矩阵。将逆矩阵应用于每一个待检测模型的节点。此时只需要检测变换后的模型是否在单位圆或单位立方体内即可。HT SDK 3D 引擎库提供了丰富的数学计算 API,可以非常直观简洁的实现以上功能。
审核编辑 黄宇
-
【「算力芯片 | 高性能 CPU/GPU/NPU 微架构分析」阅读体验】--了解算力芯片GPU2024-11-03 1147
-
NVIDIA火热招聘GPU高性能计算架构师2017-09-01 5180
-
什么是强制gpu渲染_强制渲染gpu有什么用2018-01-05 9074
-
GPU原理 GPU渲染流程2018-04-27 10244
-
GPU领跑运算性能,实现高性能计算新突破2018-10-24 6691
-
GPU加速高性能计算经典应用2022-05-24 3933
-
如何将高性能计算和科学计算应用软件更好的部署到GPU计算平台2022-05-27 2659
-
一文详解CPU渲染和GPU渲染之间的优劣2023-03-08 4137
-
智慧渲染,通用为“先”——象帝先推动 “通用、好用、高性能、自主可控” GPU解决方案2023-06-25 6394
-
主流国产gpu产品有哪些品牌(相关规格介绍)2023-08-10 5584
-
CPU渲染和GPU渲染优劣分析2024-05-23 2314
-
GPU高性能服务器配置2024-10-21 1693
-
GPU渲染才是大势所趋?CPU渲染与GPU渲染的现状与未来2025-02-06 2105
-
从CPU到GPU:渲染技术的演进和趋势2025-02-21 2005
-
华为鸿蒙正式开源SimpleGPULayer高性能GPU加速框架2026-06-01 1118
全部0条评论

快来发表一下你的评论吧 !
