

纸盒子+KT板+垃圾袋?这可能是你见过的最廉价ESP32开源航模
描述
放飞自制的小飞机,飞过高楼,飞过旷野……微风斜阳,海阔天空,何其惬意!
小小的合宙ESP32-C3开发板,在工程师朋友的手里魔法变身。就连发货的快递盒子,都物尽其物,摇身变成遥控器外壳。今天特别分享@攀哥define大佬的开源佳作。
想飞的心情到了极点,遥控塑料袋也能飞上天?阅读到底,开启惊喜之旅!

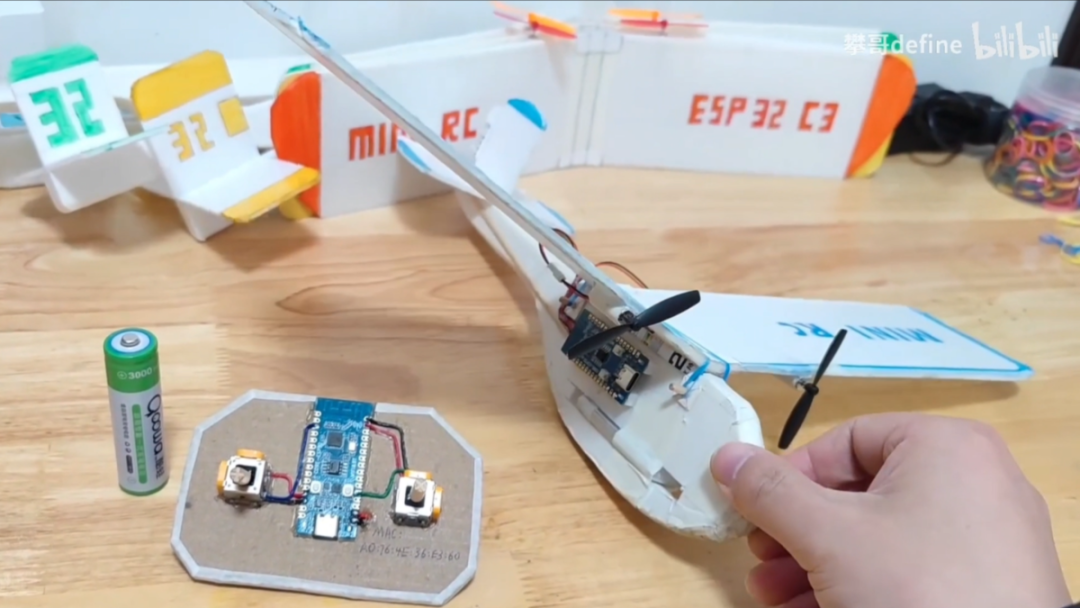
自制ESP32微型航模
这是一款以合宙ESP32-C3开发板为主控的自制遥控飞机,采用Arduino C++编程开发。成本低,简单易操作。
不同于市面上直接购买的遥控飞机,这款微型航模主要是自己动手制作的一个过程。从飞机的结构,到遥控器、接收端的编程开发等等,从头到尾都是我们自己做。
动手又动脑,很适合编程爱好者。
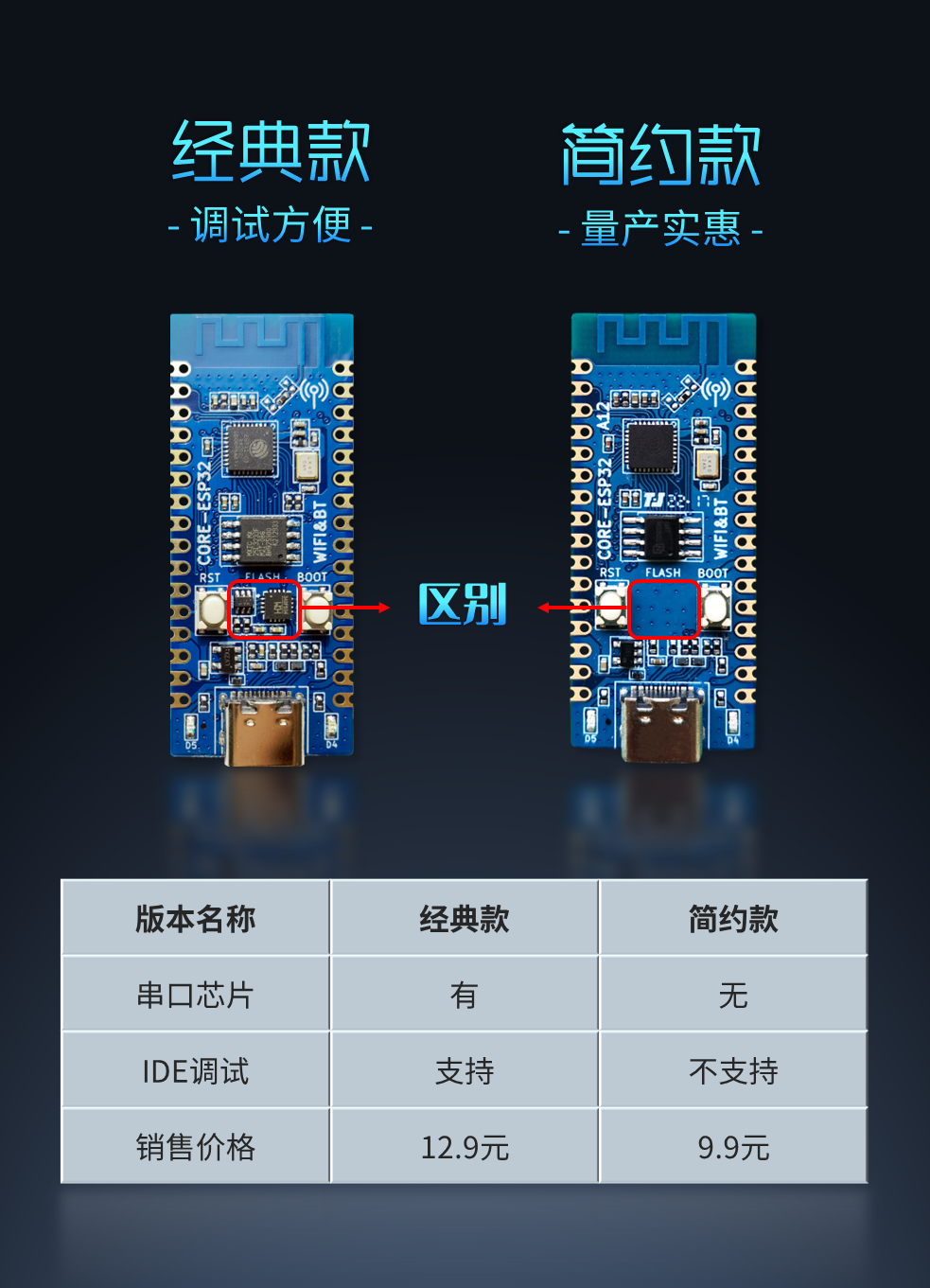
目前在售的合宙ESP32-C3开发板有经典款与简约款,两种款式均可在本项目中使用。准备新入手的同学,购买9.9的简约款即可。在自制航模的开发应用中,开发板的通信方式、数据格式等,我们都可以自己通过程序来进行定义。
1
飞机制作要点
使用10mm厚的KT板做机身,3mm厚的KT板做机翼,机身一侧固定合宙ESP32-C3开发板。根据实际需要,选用75mm或55mm螺旋桨。通过两个720空心杯电机进行差速转向,来控制飞机的转向。
锂电池的话要用航模电池,最好用大黄狗450mAh/100C的3.7V锂电池,以保证电流充足。还有驱动、电容、电阻等配件器材,详见交流群或百度网盘材料清单。
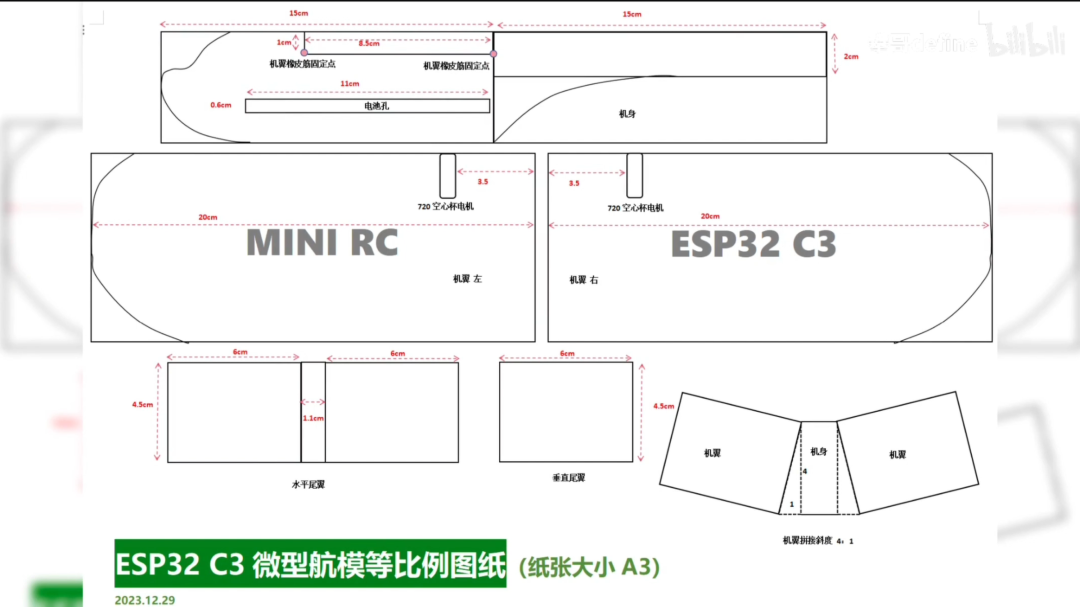
飞机图纸和接线,可参考下方图片:
飞机等比例图纸
飞机接线示意图
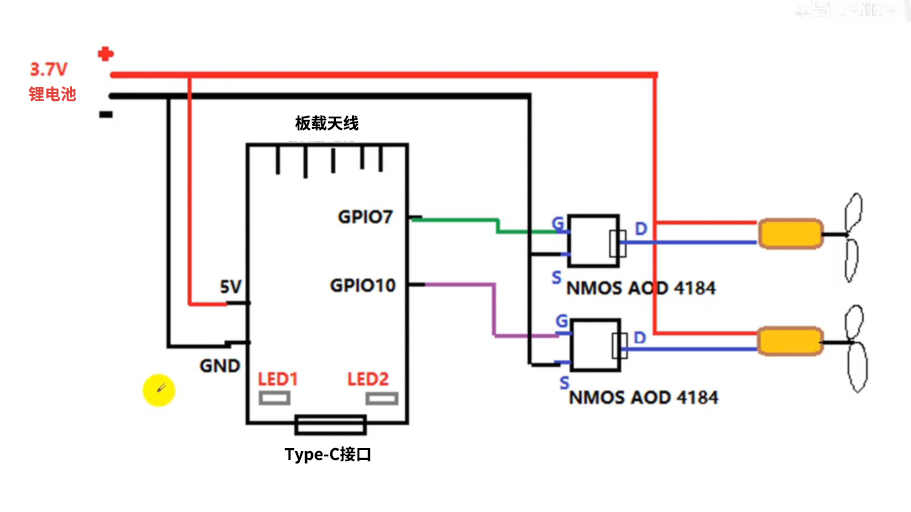
注意:开发板的供电是直接把3.7伏锂电池,接到它的一个5V供电口。不能接它的3.3V,因为它的5V进去之后,有一个降压的过程,以保证ESP32开发板能够正常运行。
合宙ESP32-C3的开发板有板载天线,我们用了它的GPIO7和GPIO10这两个接口。用了两个NMOS管,型号是AOD4184。由GPIO口来进行PWM控制,空心杯电机加上螺旋桨进行动力输出。
整个电路相对不算太复杂,主要是我们接线的时候需要留一些端子接口,这样方便拆卸。
2
遥控器制作要点
不知不觉这一年左右,买了不少合宙的开发板。“低功耗,合宙造”!买的太多,广告词都记住啦~

合宙这种发货纸盒子,不知不觉也积累了很多。平时的很多制作,陆续用掉不少:飞机遥控器面板壳子基本上都是用这个纸盒子做的,还有自制小车、笔筒之类。
除了合宙ESP32-C3开发板,2通道差速转向版本航模的遥控器主要使用到摇杆电位器、电池(普通18650电池即可,容量3000mAh为好)、电池盒、蜂鸣器(蜂鸣器可有可无,主要是方便提示飞机回传来的电量)。
-
中学男生发明的智能垃圾桶你中意吗2019-07-24 1815
-
Gerber_PCB_ESP32开源分享2022-07-04 882
-
ESP32迷你开发板设计开源分享2022-07-11 2708
-
ESP32低成本板开源项目2022-07-18 1404
-
TTGO ESP32基板开源分享2022-07-22 993
-
ESP32电源开源分享2022-08-02 1056
-
ESP32开源项目分享2022-08-04 2067
-
8个带ESP32的继电器IOT板开源2022-08-05 1675
-
纳米框架Esp32开源分享2022-11-08 1699
-
ESP32 Feather RTC与SD开源分享2022-12-09 963
-
ESP32 Pico开发板开源2023-01-04 1008
-
基于ESP32的开源项目2023-07-03 1523
-
ESP32开源项目2023-07-13 1991
-
固定式扫码器,用于流水线扫纸盒子上的条码进行分拣2025-09-03 1179
-
ESP32Cx-TINY系列立创开源啦!2026-03-30 1034
全部0条评论

快来发表一下你的评论吧 !
