

突破!清华大学在电子鼻传感器仿生嗅闻方向取得新进展
电子说
描述
近日,清华大学机械系在电子鼻仿生嗅闻研究中取得新进展,相关研究成果以“Sniffing Like a Wine Taster: Multiple Overlapping Sniffs (MOSS) Strategy Enhances Electronic Nose Odor Recognition Capability”为题发表于《先进科学》期刊(Advanced Science)2024年第7期,被选为期刊内封面文章。 该文作为亮点文章,被Wiley杂志社旗下的国际科研新闻传播平台Advanced Science News以“An artificial nose that sniffs like a wine taster”为题进行了专门新闻采访报道,并被Wiley中国官方公众号Advanced Science News作同步报道。 视觉、听觉、嗅觉三大感官是人类感知世界的重要手段。近年来,机器视觉(视频)、机器听觉(音频)已展现出媲美人类视觉与听觉的感知能力。与此同时,学者们长期致力于设计制造性能超越人类嗅觉的电子鼻设备。受限于当前气体传感器技术的限制,电子鼻在复杂气味辨识、多气味分类等问题上仍难以匹敌人类嗅觉,电子鼻研究仍需进一步借鉴仿生人类嗅觉。
该研究提出一种用于电子鼻气体采样的仿生嗅闻策略,实现了对不同烈酒气味的准确辨识。传统的电子鼻气体采样往往采取单次进样策略,得到的电子鼻传感信号缺乏有效的动态特征。该研究所提的仿生嗅闻策略通过模仿专业品酒师的嗅闻方法,创新性地引入多重重叠的嗅闻(Multiple Overlapping Sniffs, MOSS)以使电子鼻的传感器阵列产生动态特征丰富的时序信号,从而提升对不同气体的感知辨识能力。 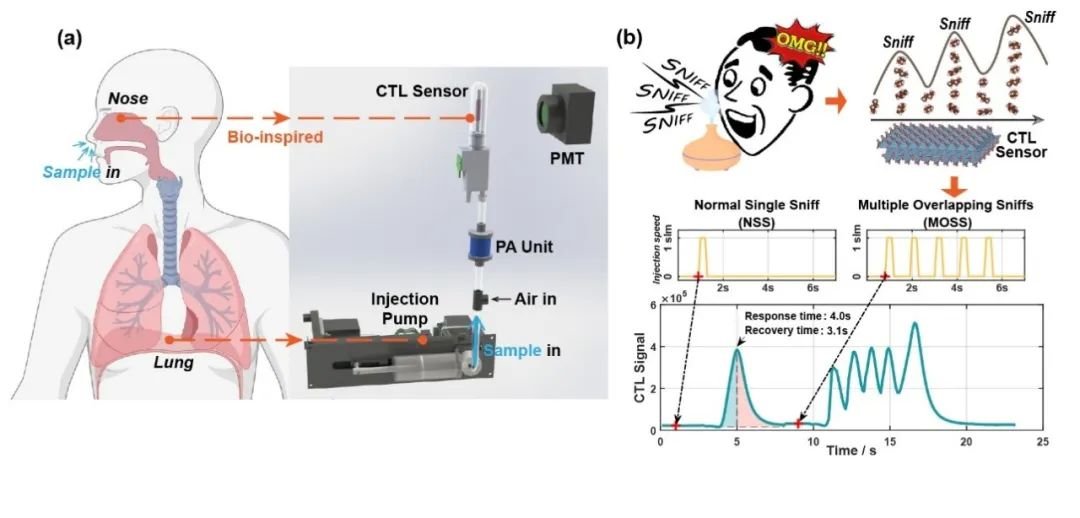 图 2 (a) 具有仿生肺的电子鼻设备示意图 (b) 多重重叠嗅闻(MOSS)策略示意图 该研究设计制造了具有仿生肺的电子鼻设备,采用了可编程注射泵模拟仿生肺结构,并基于催化化学发光原理设计制造了气体传感阵列。该仿生肺能以1Hz频率连续吸入测试气体并注射到催化化学发光(CTL)传感器表面,从而实现多重重叠嗅闻策略的气体进样。该电子鼻设备的气体传感阵列将4种纳米金属氧化物作为催化剂,可对复杂成分气体中的挥发性有机物(VOC)产生交叉响应,从而实现对不同气体的差异化感知。其中CTL传感器的响应时间约为4秒,可及时响应嗅闻引发的动态气流变化并输出响应信号。
图 2 (a) 具有仿生肺的电子鼻设备示意图 (b) 多重重叠嗅闻(MOSS)策略示意图 该研究设计制造了具有仿生肺的电子鼻设备,采用了可编程注射泵模拟仿生肺结构,并基于催化化学发光原理设计制造了气体传感阵列。该仿生肺能以1Hz频率连续吸入测试气体并注射到催化化学发光(CTL)传感器表面,从而实现多重重叠嗅闻策略的气体进样。该电子鼻设备的气体传感阵列将4种纳米金属氧化物作为催化剂,可对复杂成分气体中的挥发性有机物(VOC)产生交叉响应,从而实现对不同气体的差异化感知。其中CTL传感器的响应时间约为4秒,可及时响应嗅闻引发的动态气流变化并输出响应信号。 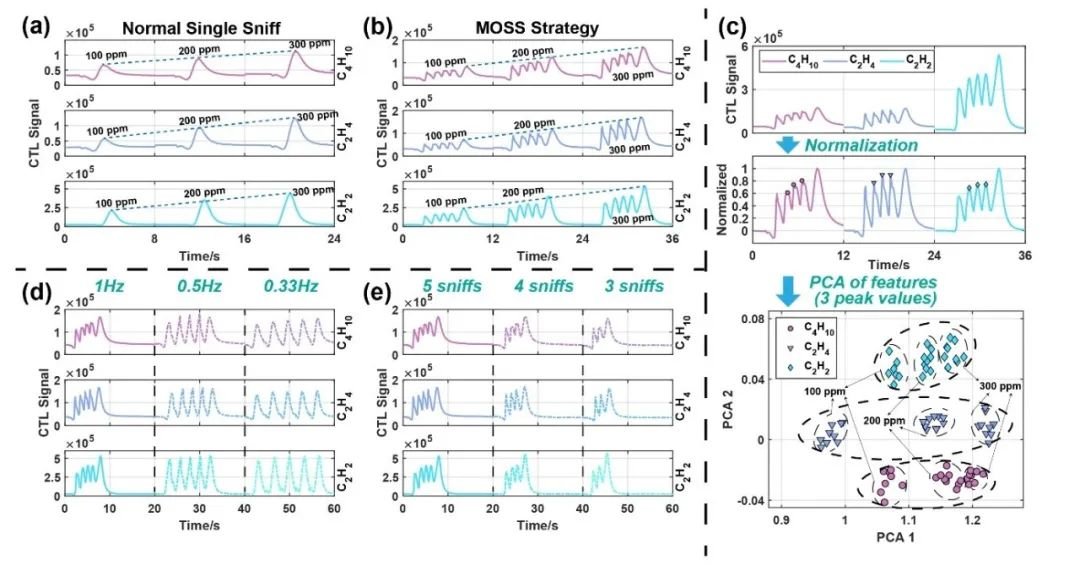 图 3 针对挥发性有机物气体的辨识实验 该研究首先针对挥发性有机物气体(VOC)辨识进行探究。研究者在单个CTL传感器上对三种不同浓度的VOC气体(乙烯、乙炔、丁烷)展开检测,分别使用传统单次进样方法与MOSS策略进行采样。实验表明,在传统气体进样方法下,该CTL传感器响应幅值与气体浓度成正比,而无法提取有效的VOC种类信息。在所提供的MOSS策略下,该CTL传感器的时序信号波形具有明显的区分度。实验证明,将时序信号的相对峰值作为特征向量,可直接通过主成分分析同时辨识VOC气体种类与浓度,而无需额外的机器学习算法。
图 3 针对挥发性有机物气体的辨识实验 该研究首先针对挥发性有机物气体(VOC)辨识进行探究。研究者在单个CTL传感器上对三种不同浓度的VOC气体(乙烯、乙炔、丁烷)展开检测,分别使用传统单次进样方法与MOSS策略进行采样。实验表明,在传统气体进样方法下,该CTL传感器响应幅值与气体浓度成正比,而无法提取有效的VOC种类信息。在所提供的MOSS策略下,该CTL传感器的时序信号波形具有明显的区分度。实验证明,将时序信号的相对峰值作为特征向量,可直接通过主成分分析同时辨识VOC气体种类与浓度,而无需额外的机器学习算法。 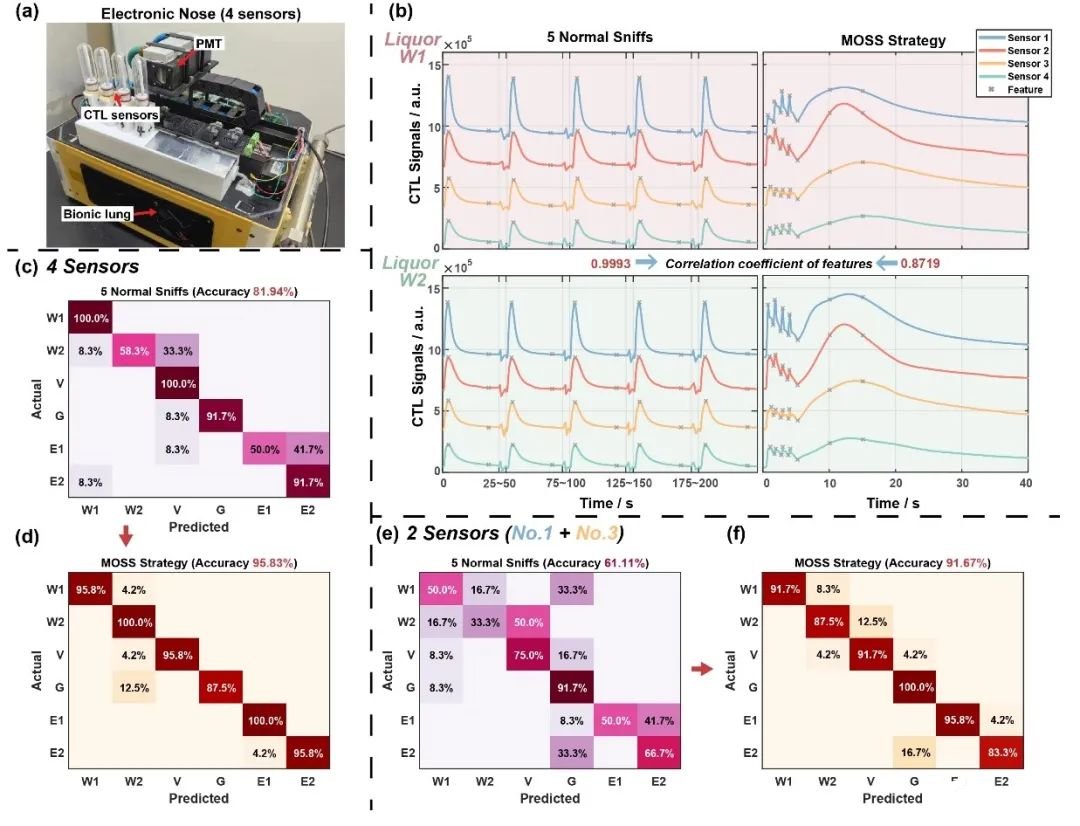 图 4 针对烈酒种类的辨识实验 该研究中,研究者也针对不同烈酒种类辨识展开探究。研究者在4个CTL传感器组成的电子鼻上对6种烈酒展开检测,分别使用传统单次进样方法与MOSS策略进行采样。实验证明,相较于传统单次进样方法,MOSS策略可将该电子鼻设备对6种烈酒的辨识准确度从81.94%提升到95.83%,能够实现对不同烈酒种类的高准确度辨识。进一步实验表明,在仅有2个CTL传感器检测6种烈酒的限制条件下,传统单次进样方法的电子鼻仅能实现61.11%的辨识准确度,而MOSS策略可使该电子鼻实现91.67%的辨识准确度。以上实验说明了MOSS策略对电子鼻气味辨识能力的显著提升效果。
图 4 针对烈酒种类的辨识实验 该研究中,研究者也针对不同烈酒种类辨识展开探究。研究者在4个CTL传感器组成的电子鼻上对6种烈酒展开检测,分别使用传统单次进样方法与MOSS策略进行采样。实验证明,相较于传统单次进样方法,MOSS策略可将该电子鼻设备对6种烈酒的辨识准确度从81.94%提升到95.83%,能够实现对不同烈酒种类的高准确度辨识。进一步实验表明,在仅有2个CTL传感器检测6种烈酒的限制条件下,传统单次进样方法的电子鼻仅能实现61.11%的辨识准确度,而MOSS策略可使该电子鼻实现91.67%的辨识准确度。以上实验说明了MOSS策略对电子鼻气味辨识能力的显著提升效果。
针对MOSS策略的动力学原理,该研究进行了计算流体动力学仿真验证。验证结果说明,由于同一CTL传感器对不同气体成分的响应方程及参数并不相同,这一差异在MOSS策略引发的动态气流下会直接导致时序传感信号的波形差异,从而有助于模式识别算法从传感信号中提取特征数据并辨识不同气体成分,这为该研究所提的MOSS策略提供了明确的理论依据。 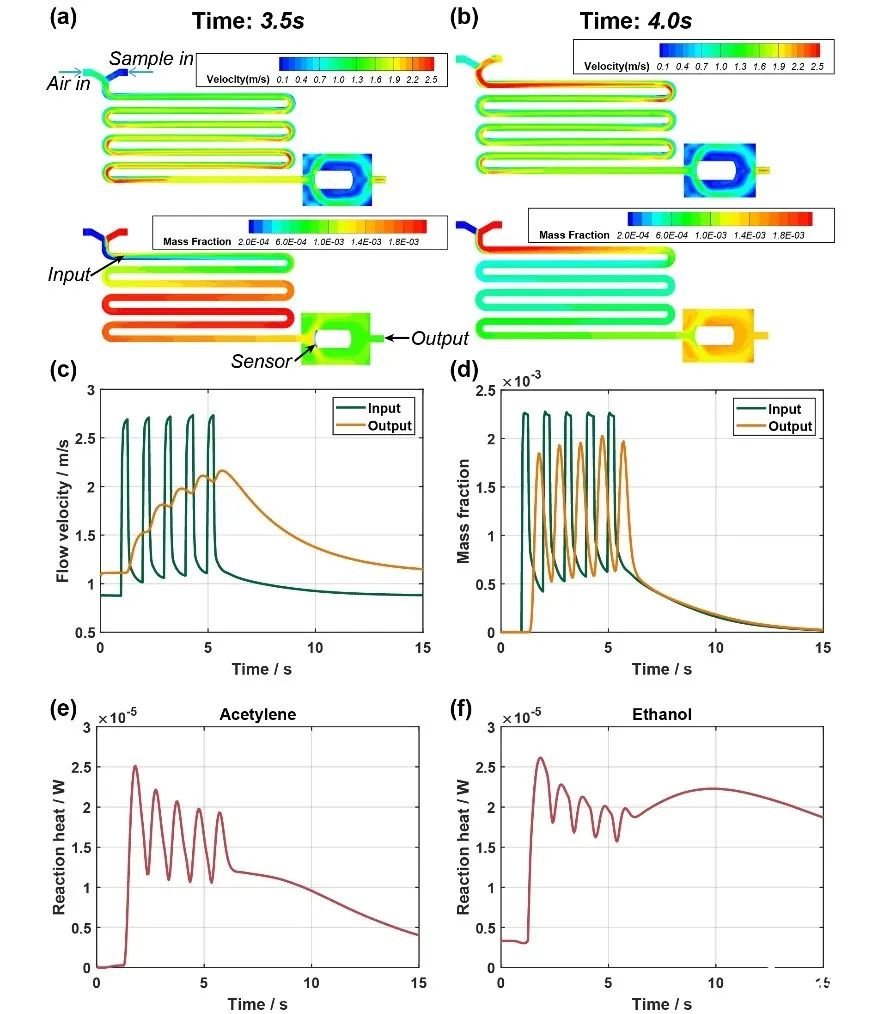 图 5 MOSS策略的计算流体力学验证 未来研究中,MOSS策略将有望应用于多样化的复杂气味检测分析场景中,例如基于人体呼出气检测的癌症、流感、糖尿病等疾病无损诊断,基于有害气体检测的爆炸物搜寻与火灾隐患预警,基于香气检测的白酒、茶叶品质评估与真伪鉴别。 清华大学机械系长聘副教授胡楚雄为该文通讯作者,清华大学机械系2019级博士生刘路正为第一作者,北京师范大学化学学院那娜教授作为第二作者为研究工作做出了贡献。研究工作得到了国家自然科学基金、摩擦学国家重点实验室的支持。
图 5 MOSS策略的计算流体力学验证 未来研究中,MOSS策略将有望应用于多样化的复杂气味检测分析场景中,例如基于人体呼出气检测的癌症、流感、糖尿病等疾病无损诊断,基于有害气体检测的爆炸物搜寻与火灾隐患预警,基于香气检测的白酒、茶叶品质评估与真伪鉴别。 清华大学机械系长聘副教授胡楚雄为该文通讯作者,清华大学机械系2019级博士生刘路正为第一作者,北京师范大学化学学院那娜教授作为第二作者为研究工作做出了贡献。研究工作得到了国家自然科学基金、摩擦学国家重点实验室的支持。
论文原文链接:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202305639
审核编辑 黄宇
-
风光互补技术及应用新进展2009-10-22 3048
-
CMOS图像传感器最新进展及发展趋势是什么?2021-06-08 4810
-
我国酶传感器研究新进展2009-07-10 1084
-
电子变压器新进展2009-11-19 870
-
清华大学仿生石墨烯压力传感器研究取得重要进展2018-03-16 10538
-
清华大学在量子信息领域取得重要进展2021-03-08 2907
-
中山大学:在超结构泡沫传感器取得新进展,用于设计和构建基于多样的构建单元的超结构材料2022-12-14 1840
-
安徽大学:在柔性离子型压敏传感器及电子皮肤研究方面取得新进展2023-01-09 1769
-
山西大学:在电化学传感器的设计和肿瘤标记物检测方面取得新进展2023-03-01 1499
-
清华大学:智能气体传感器研究中取得新进展,基于单气体传感器实现了混合物多组分智能检测2023-04-03 2295
-
清华大学在超快激光微纳制造领域获得新进展2023-05-31 1746
-
清华大学团队在超高性能计算芯片领域取得新突破2023-10-29 2636
-
清华大学在电子鼻传感器仿生嗅闻方向取得新进展2024-02-20 2296
-
清华大学在石墨负极储能领域取得系列突破性进展2025-09-22 5278
-
清华大学在分焦面超像素阵列光刻制造领域取得新进展2026-01-21 348
全部0条评论

快来发表一下你的评论吧 !
