

车载ECU功能安全工程实践
汽车电子
描述
1 引言
2018年12月,备受汽车电子行业关注的ISO26262《道路车辆功能安全标准》第二版发布,适用范围从乘用车扩展到所有车型,包括商用车和摩托车,该标准对商用车汽车电子器件提出更为详尽的功能安全要求。在功能安全相对领先的欧美国家,主流OEM和Tier1普遍对ISO26262标准有要求,已成为事实强制标准。
我从2016年接触ISO26262标准以来,对PART 6“软件部分”进行了反复研读,但始终无法找到其与车载嵌入式软件设计之间的联系,在很长一段时间内都不知道如何开发出满足功能安全的车载ECU软件;即使在2020年,我所在的电控团队顺利拿到了ISO26262 ASIL D流程认证,但我对功能安全的认知也仅仅停留在“编写一系列文档”的水平。
从2022年4月到2023年12月,我有幸全程参与了一个完整的车载电控模块功能安全项目 - 基于公司的某款纯电车辆,开发出满足功能安全ASIL C/D等级的VCU(整车控制器)产品。在这篇文章里,我将结合自己在项目中的实践,对部分开发过程进行梳理,希望能给像我一样对ISO26262标准实现有困惑的同行提供些许参考。
2 基本概念
ISO26262标准的术语在PART 1中按照音序顺序进行了详细描述,表2-1只列出了本文需要用到的基本概念。
表2-1: VCU功能安全项目术语
| 序号 | 术语/缩写 | 全称 | 备注 |
| 1 | BD | 行为设计(Behavior Design) | |
| 2 | FIT | 失效率(Failures In Time) | |
| 3 | FSC | 功能安全概念(Functional Safety Concept) | |
| 4 | FSR | 功能安全需求(Function Safety Requirement) | |
| 5 | FHTI | 故障处理时间间隔(Fault Handling Time Interval) | |
| 6 | FTA | 故障树分析(Fault Tree Analysis) | |
| 7 | FTTI | 故障容错时间间隔(Fault Tolerant Time Interval) | |
| 8 | HARA | 危害分析与风险评估(Hazard Analysis and Risk Assessment) | |
| 9 | HAZOP | 危害和可操作性分析(HAZard and OPerability analysis) | |
| 10 | HSI | 硬件软件接口(Hardware Software Interface) | |
| 11 | MF | 功能故障描述(Malfunction) | |
| 12 | SM | 安全机制(Safety Machanism) | |
| 13 | TSC | 技术安全概念(Technical Safety Concept) | |
| 14 | TSR | 技术安全需求(Technical Safety Requirement) |
3 功能安全概念开发
VCU功能安全项目只进行了概念(ISO26262 PART3)、系统(ISO26262 PART4)、硬件(ISO26262 PART5)和软件(ISO26262 PART6)阶段的开发,本章整理概念阶段的工作内容,系统和软件的工作将分别在第4章和第5章整理。
功能安全概念阶段应输出相关项定义、危害分析和风险评估、功能安全概念等工作产品。
3.1 相关项定义
相关项指实现整车层面功能或部分功能的系统或系统组合;相关项定义指在整车层面对相关项进行定义和描述,包括功能及其与驾驶员、环境和其他相关项的依赖性和交互。
概念阶段的开发是从相关项定义(Item Definition)开始的,相关项定义是对系统的描述,此系统也是标准中“安全”要求应用的对象。
项目定义的目的是定义和描述相关项,以及对其他相关项和环境的依赖和相互作用。因此,需要描述功能和非功能需求、边界、接口和其他系统相互作用的假设。
相关项定义为危害分析和风险评估(HARA)提供输入参数,在HARA中通过对E/E系统功能故障的定义和分析,识别整车级别的潜在危害。
对于相关项(Item)的边界,相关项与其他相关项或环境的相互作用,相关项内部的元素以及涉及到元素的功能分配,需要在相关项文档进行描述。
表3-1列出相关项定义的主要内容。
表3-1: 相关项定义主要内容
| 序号 | 内容 | 描述 |
| 1 | 车辆环境描述 | 用于描述车辆的配置、性能、使用环境、投放市场、相似功能,作为HARA分析和后续其他阶段的必要输入信息 |
| 2 | 法规要求 | 列出相关项需要满足相关法律法规的要求,用于指导系统设计 |
| 3 | 相关项描述 | 描述VCU的工作原理和执行器特性 |
| 4 | 运行模式 | 描述车辆运行模式及切换条件 |
| 5 | 功能行为设计描述 | 识别和描述相关项在整车级别的所有功能行为;识别整车级别功能与驾驶员和车辆的交互以及车辆的预期行为。包含蠕行控制、车辆加速控制、定速巡航控制、车辆滑行能量回收、车辆制动能量回收、坡起辅助控制、限速控制、切换驾驶模式、制动优先、响应外部请求、驾驶员离车或插枪时自动回P、挡位控制N挡进入、挡位控制D挡进入、挡位控制R挡进入、挡位显示、续航里程计算、远程锁车控制(限速)、行驶高压上电控制、行驶高压下电控制、交流充电高压上电控制、交流充电高压下电控制、直流充电高压上电控制、直流充电高压下电控制、主动放电使能控制、DC/DC使能控制、空调制冷控制、空调制热控制、驱动电机及高压附件冷却控制、动力电池冷却控制、动力电池加热控制、制动真空泵控制 |
| 6 | 整车级功能描述及架构设计 | 整车级功能:蠕行控制、车辆加速控制、定速巡航控制、车辆滑行能量回收、车辆制动能量回收、制动优先、坡起辅助控制、限速控制、挡位控制、切换驾驶模式、续驶里程计算、行驶高压上下电控制、充电高压上下电控制、主动放电使能控制、DC/DC使能控制、空调热管理使能控制、动力电机及高压附件热管理控制、动力电池热管理控制、制动真空泵控制;架构设计:车辆扭矩管理、挡位控制、切换驾驶模式、续驶里程计算、高压上下电控制、主动放电使能控制、DC/DC使能控制、热管理控制、制动真空泵控制 |
| 7 | 系统架构 | 根据功能架构汇总得到整车级系统架构,包含整体架构、元素接口(VCU与外部相关项进行信息交互的接口定义,即不同相关项之间进行信息交互所使用接口的描述)、功能分配(分配到架构各个元素的功能,即实现整车级功能的每个组成元素的需求) |
| 8 | 质量/性能/可用性需求 | 描述功能的质量、性能和可用性需求 |
| 9 | 操作和环境约束 | 描述相关项的应用环境和操作的约束 |
| 10 | 功能相关性 | 描述相关项对外部相关项的要求及来自外部相关项的要求 |
| 11 | 运行情景 | 列出系统常见使用情景,用于指导HARA和系统设计,如乡村公路车辆直线行驶、城市道路车辆直线行驶、高速公路直线行驶、湿滑路面行驶、停车场等 |
| 12 | 失效后果及影响 | 描述相关项已知的潜在危害,用于指导HARA和系统设计 |
3.2 HARA分析
危害分析、风险评估和ASIL等级的评定用于确定相关项的安全目标。为此,根据相关项的潜在危害事件,对相关性进行评估。通过对危害事件进行系统性的评估确定安全目标及分配给他们的ASIL等级。ASIL等级的确定需要考虑严重度、暴露概率和可控性。
HARA分析的输出物是《危害分析和风险评估报告》。
3.2.1 危害分析
表3-2为危害分析示例。
表3-2: 危害分析示例
| 危害分析 | ||||||
| 功能编号Function ID |
功能 Function |
HAZOP① | checked |
功能故障描述 Malfunction |
失效的影响 Effect of failure |
功能故障编号 |
| VF-004 | 车辆滑行能量回收功能 | No | X | 滑行能量回收功能无法提供制动(负)扭矩 | 电机滑行制动力矩非预期消失,刹车距离增加 | MF001 |
| No | X | 滑行能量回收功能无法进入 | 失效表现与MF001相同,不重复讨论 | MF002 | ||
| No | X | 滑行能量回收功能无法退出 | 失效表现与MF008相同,不重复讨论 | MF003 | ||
| Less | X | 滑行能量回收功能提供制动(负)扭矩过小 | 电机滑行制动力矩过小,刹车距离增加 | MF004 | ||
| More | X | 滑行能量回收功能提供制动(负)扭矩过大(≤0.6m/s2) | 电机滑行制动力矩过大,滑行减速度过大 | MF005 | ||
| More | X | 滑行能量回收功能提供制动(负)扭矩过大(>0.6m/s2) |
1.电机滑行制动力矩过大,滑行减速度过大 2.车辆横向运动失控 |
MF006 | ||
| Part of | X | |||||
| As Well As | X | |||||
| Reverse | X | 滑行能量回收功能提供扭矩反向(扭矩为正) | 车辆非预期加速行驶 | MF007 | ||
| Unintended | X | 滑行能量回收功能提供非预期制动(负)扭矩 |
1.车辆无法加速行驶,车辆减速 2.车辆横向运动失控 |
MF008 | ||
| Unintended | X | 滑行能量回收功能非预期进入 | 失效表现与MF008相同,不重复讨论 | MF009 | ||
| Unintended | X | 滑行能量回收功能非预期退出 | 失效表现与MF001相同,不重复讨论 | MF010 | ||
| Early | X | NA | NA | |||
| Later | X | NA | NA | |||
| Before | X | NA | NA | |||
| After | X | NA | NA | |||
| Stuck | X | NA | NA | |||
| Misuse | X | NA | NA | |||
| From Experience | X | NA | NA | |||
①如表3-3和图3-1所列
表3-3: 危害分析引导字说明
| Guideword | 含义 |
| No | 功能突然丢失 |
| Less | 功能输出少于预期 |
| More | 功能输出大于预期 |
| Part of | 预期执行A+B功能时,实际只执行了A功能 |
| As Well As | 预期执行A功能时,同时非预期的执行了B功能 |
| Reverse | 与预期功能的逻辑相反 |
| Unintended | 非预期的功能输出 |
| Early | 功能输出比预期的时间早 |
| Later | 功能输出比预期的时间晚 |
| Before | 功能输出相对于顺序或序列提前 |
| After | 功能输出相对于顺序或序列延后 |
| Stuck | 功能卡滞 |
| Misuse | 无意误用A功能 |
| From Experience | 以上guideword以外的失效 |
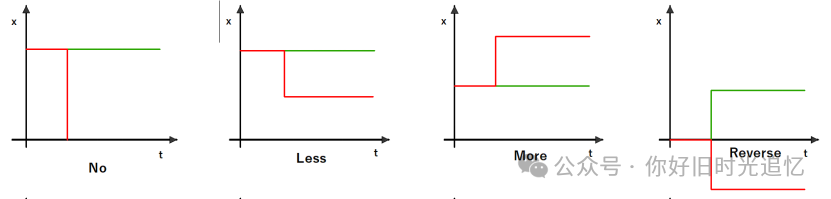
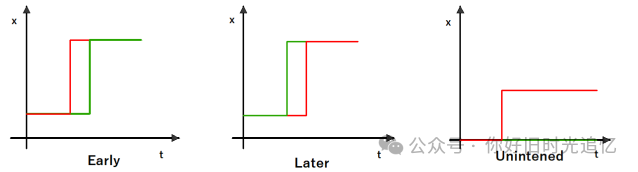
图3-1: 危害分析引导字图示
3.2.2 风险评估
对不含内部安全机制的相关项进行评估,表3-4为风险评估示例。
表3-4: 风险评估示例
| 序号 | 评估项 | 内容 |
| 1 | ID | HE013 |
| 2 | Function | [VF-004] 滑行能量回收扭矩控制 |
| 3 | Malfunctioning Behavior | [MF006] 滑行能量回收功能提供制动扭矩过大(>0.6m/s2) |
| 4 | Hazard | [H004]车辆横向运动失控 |
| 5 | Location | NA |
| 6 | Road Conditions |
F 冰雪路面-E2 ISO26262 |
| 7 | Environment | NA |
| 8 | Item Usage |
F 直线行驶-E4 Experience |
| 9 | Traffic and People |
F 通畅(正常车距)-E4 VDA702 |
| 10 | Potential Effect | 车辆制动力过大,车辆偏离车道并与其他车辆、行人或物体发生碰撞的可能性 |
| 11 | Assumptions and Coments | NA |
| 12 | Exposure | E2 |
| 13 | Exposure Comment | 车辆在冰雪路面准备滑行 |
| 14 | Severity | S3 |
| 15 | Severity Comment | 车辆失去道路抓地力,前轮抱死时车无法转向,后轮抱死时车会侧滑,导致车辆偏离车道并与其他车辆、行人或物体发生碰撞,对应S3 |
| 16 | Controllability | C3 |
| 17 | Controllability Comment | 车辆失去抓地力,驾驶员无法重新控制车辆,没有可控性 |
| 18 | ASIL | ASIL B |
| 19 | Safety Goal | [SG001]避免滑行能量回收功能输出的制动(负)扭矩过大(∆a减速度>0.6m/s2)导致车辆失稳(ASIL B) |
3.2.3 计算过程
确定每个危害事件的严重度等级、暴露概率等级和可控性等级,并根据这三者确定其ASIL等级。本步对所有不含内部安全机制的相关项进行风险评估。
表3-5、表3-6、表3-7和表3-8分别列出与ASIL等级确定的知识点。
表3-5: 严重度等级
| 等级 | S0 | S1 | S2 | S3 |
| 描述 | 无伤害 | 轻度和中度伤害 | 严重的和危及生命的伤害(有存活的可能) |
危及生命的伤害(存活不确定) 致命的伤害 |
表3-6: 关于运行场景的暴露概率等级
| 等级 | E0 | E1 | E2 | E3 | E4 |
| 描述 | 不可能 | 非常低的概率 | 低概率 | 中等概率 | 高概率 |
表3-7: 可控性等级
| 等级 | C0 | C1 | C2 | C3 |
| 描述 | 可控 | 简单可控 | 一般可控 | 难以控制或不可控 |
表3-8: ASIL等级确定
| 严重度等级 | 暴露概率等级 | 可控性等级 | ||
| C1 | C2 | C3 | ||
| S1 | E1 | QM | QM | QM |
| E2 | QM | QM | QM | |
| E3 | QM | QM | A | |
| E4 | QM | A | B | |
| S2 | E1 | QM | QM | QM |
| E2 | QM | QM | A | |
| E3 | QM | A | B | |
| E4 | A | B | C | |
| S3 | E1 | QM | QM | A |
| E2 | QM | A | B | |
| E3 | A | B | C | |
| E4 | B | C | D | |
3.2.4 安全目标
应为具有ASIL等级的每个危害事件确定一个安全目标,该ASIL等级从危害分析和风险评估中得出。如果所确定的安全目标是类似的,可将其合并为一个安全目标。
表3-9为安全目标示例。
表3-9: 安全目标示例
|
编号 ID |
安全目标 Safety Goal |
ASIL等级 ASIL |
安全状态 Safe State |
故障容错时间间隔 FTTI |
故障处理时间间隔 FHTI |
| SG001 | 避免滑行能量回收功能输出的制动(负)扭矩过大(∆a减速度>0.6m/s2)导致车辆失稳 | ASIL B | 关闭滑行能量回收功能,并报警提醒驾驶员 | 300ms | 300ms |
| SG002 | 避免滑行能量回收功能提供的扭矩反向(提供正扭矩)导致车辆非预期加速 | ASIL A | 关闭滑行能量回收功能,并报警提醒驾驶员 | 2130ms | 200ms |
3.3 功能安全概念
为了满足安全目标,功能安全概念包括安全措施(含安全机制),这些安全措施将在相关项的架构要素中实现,并在功能安全要求中规定。
功能安全概念包含以下内容。
3.3.1 安全分析
针对每个安全目标,对系统的初始架构进行安全分析,找出影响安全目标的子系统故障,作为后续导出功能安全需求的依据。安全分析工具可以是FTA或FMEA,图3-2为采用FTA方法的示例。
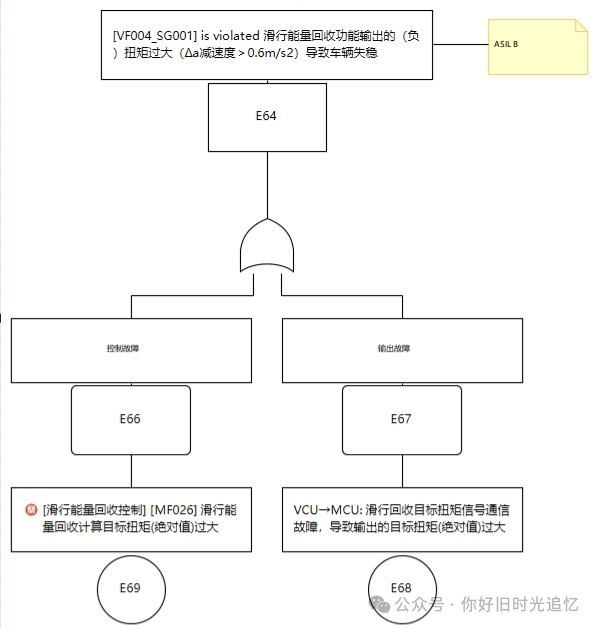
图3-2: FTA安全分析示例
3.3.2 功能安全需求
根据安全分析的结果,针对每个安全目标导出相应的功能安全需求。表3-10为功能安全需求的编写示例。
表3-10: 功能安全需求示例
| 序号 | 需求项 | 内容 |
| 1 | ID | FSR062 |
| 2 | Name | 滑行能量回收控制 |
| 3 | Description | VCU应正确计算滑行能量回收目标扭矩 |
| 4 | Kind | FUNCTIONAL |
| 5 | ASIL | B |
| 6 | Time constraint | 周期:TBDms |
| 7 | Related Goals |
VF004_SG001(ASIL B) VF004_SG002(ASIL A) |
| 8 | Event |
[E69] [滑行能量回收控制] [MF026] 滑行能量回收计算目标扭矩(绝对值)过大 [E73] [滑行能量回收控制] [MF027] 滑行能量回收计算目标扭矩反向(为正扭矩) |
| 9 | Allocations | VCU(ASIL C) |
| 10 | Status | PROPOSED |
| 11 | 接收准则 | Test |
3.3.3 外部系统功能安全需求
外部系统功能安全需求分为“相关项对外部系统的功能安全需求”和“外部系统对相关项的功能安全需求”,表3-11和表3-12分别为这两者的示例。
表3-11: 相关项对外部系统的功能安全需求示例
|
编号 ID |
名称 Name |
描述 Description |
时间约束 TimeConstraint |
| 1 | BMS | BMS的热管理系统应能提供过温保护的安全机制,防止热失控带来的危害,安全等级达到ASIL C等级 | 5000ms |
| 2 | 维修操作手册 | 维修手册应详细说明交流充电关联系统的维修流程,必须完全断开充电高压回路后方可进行维修作业 | NA |
| 3 | MCU | MCU应正确接收VCU发送的蠕行目标扭矩,安全等级达到ASIL B等级 | 周期:TBDms |
表3-12: 外部系统对相关项的功能安全需求示例
|
编号 ID |
名称 Name |
描述 Description |
时间约束 TimeConstraint |
| 1 | TBD(继承ID文档) | VCU上高压的状态信号、车速信号的功能安全等级为ASIL A | NA |
| 2 | ADU | VCU应对ADU发送的扭矩请求信号进行E2E诊断,安全等级达到ASIL B(D)等级 | NA |
| 3 | ADU | VCU应响应ADU发送的扭矩请求信号,安全等级达到ASIL B(D)等级。 | TBD |
3.3.4 报警和降级
当系统诊断到相应的故障后,应该立刻进入到安全状态,如不能直接进入安全状态,则需要进入紧急操作模式,或降级模式,再进入安全状态,同时也要规定紧急操作模式的时间长度。另外,当故障出现后,驾驶员需要作何反应,有何行为要求也需要描述。
表3-13为报警和降级的编写示例。
表3-13: 报警和降级示例
| 整车级功能 | 编号 | 安全目标 | 失效模式 | 过渡到安全状态 | 紧急措施/降级 | 紧急措施时间间隔 | 恢复到正常状态 | 驾驶员动作 | 报警 |
| VF001 | SG001 | 避免蠕行控制输出的驱动扭矩过大,导致追尾前车 | [MF033]蠕行扭矩计算过大 | 禁止蠕行控制 | / | / | 下一点火周期故障消除 | / | / |
| 蠕行扭矩信号通信故障,导致输出蠕行扭矩过大 | 故障消除 |
3.3.5 功能安全需求汇总和分配
对所有安全目标导出的功能安全需求进行汇总和ASIL等级的合并,确定相关项的功能安全需求,同时将功能安全需求分配到系统架构中去。
表3-14为功能安全需求汇总和分配示例。
表3-14: 功能安全需求汇总和分配示例
| 序号 | 需求项 | 内容 |
| 1 | ID | FSR062 |
| 2 | Name | 滑行能量回收控制 |
| 3 | Description | VCU应正确计算滑行能量回收目标扭矩 |
| 4 | Kind | FUNCTIONAL |
| 5 | ASIL | B |
| 6 | Time constraint | 周期:TBDms |
| 7 | Related Goals |
VF004_SG001(ASIL B) VF004_SG002(ASIL A) |
| 8 | Event |
[E69] [滑行能量回收控制] [MF026] 滑行能量回收计算目标扭矩(绝对值)过大 [E73] [滑行能量回收控制] [MF027] 滑行能量回收计算目标扭矩反向(为正扭矩) |
| 9 | Allocations | VCU |
| 10 | Status | PROPOSED |
| 11 | 接收准则 | Test |
3.3.6 功能安全架构
根据所提出的FSR,更新系统架构,并将功能安全需求分配到架构的模块上去,从而使得系统的架构满足功能安全需求。
4 功能安全系统开发
功能安全系统阶段的工作包括技术安全需求、技术安全概念、系统架构设计规范和软硬件接口规范等。
4.1 技术安全需求
技术安全需求应定义系统对影响安全需求实现的激励的响应。这包括在各种相关运行模式和所定义的系统状态下,激励与失效的组合。
表4-1为技术安全需求示例。
表4-1: 技术安全需求示例
| 序号 | 需求项 | 内容 |
| 1 | ID | TSR30 |
| 2 | Name | 制动踏板比较监控,故障确认 |
| 3 | Description | 当制动踏板1与制动踏板2采集到的有效结果不一致,并持续60ms时,故障确认 |
| 4 | ASIL | C |
| 5 | Contributes To | FSR038-042,FSR084:制动开关非预期未踩下;FSR044-047巡航无法退出 |
| 6 | Allocations | MicroController-L2 |
| 7 | Type | ASW |
| 8 | Operation Mode | 行驶模式 |
| 9 | Time Constraint | 60ms |
4.2 软硬件接口规范
软硬件接口规范包含以下内容。
4.2.1 操作模式
操作模式包括操作模式转换图(Operating Modes Transfer Diagram)、操作模式描述(Operating Modes Description)和操作模式转换条件(Operating Modes Transfer Condition)等。图4-1、表4-2和表4-3分别为三者的示例。
图4-1: 操作模式转换图示例
表4-2: 操作模式示例
| Mode | Description | Use in the project |
| Run Mode | 至少有一个主CPU没有请求睡眠模式或待机模式,并且处于运行模式。所有外围模块都处于活跃状态 | Y |
| Sleep Mode | CPU代码执行暂停,进入CPU空闲状态。如果在相应的CLCx.EDIS位中进行了配置,则外围设备将进入睡眠状态。端口保持各自先前的状态 | N |
| Standby Mode | 构成备用RAM和唤醒单元的备用域保持活动供电。芯片其余部分的电源完全关闭 | N |
表4-3: 操作模式转换条件示例
| 当前模式 | 下一时刻模式 | 转换条件(OR) |
| CPU Run Mode | CPU Idle Mode | 当CPU没有活动任务要执行时,通过设置寄存器位PMCSRx.REQSLP = 01B发出SW空闲请求 |
| 在另一个CPU发出的软件空闲请求(PMCSRy.REQSLP = 01B) | ||
| 在SMU空闲请求下,如果检测到CPU故障,则会触发安全警报,该警报在SMU中配置为将CPU设定为空闲状态 | ||
| CPU Idle Mode | CPU Run Mode | 当CPU发生中断时 |
| 当发生Trap(如NMI Trap事件)时 | ||
| 当CPU看门狗或安全看门狗定时器溢出事件触发SMU警报进而导致CPU中断时 | ||
| CPU看门狗计数器发生MSB位换行时 | ||
| 当应用程序复位、系统复位或任何更高级别的复位发生时 |
4.2.2 配置参数
列出IC相关配置参数(如:MCU、通信、存储器、I/O)。例如:AURIX TC275的描述内容包括MCAL、SafeTlib、MCU-SM。
4.2.3 独立性要求
软件进行相关失效分析(Dependent Failure Analysis)后识别到支持软件独立性要求的硬件特性。
表4-4为AURIX-TC275的描述内容(部分)。
表4-4: AURIX-TC275独立性要求描述
| Dependent Failure Initiator | Hardware features | Safety mechanisms |
| Clock |
For safety reasons clock monitors are available.Each of these clocks is monitored by its own counter. As reference clock the back-up clock is used as diverse clock source. |
SM1[HW].VADC:CLKMON SM1[HW].GTM:CLKMON SM1[HW].STM:CLKMON SM1[HW].SPB:CLKMON SM1[HW].SRI:CLKMON SM1[HW].SystemPLL:CLKMON |
| SRAM | The SRAM monitoring is based on error detection and correction codes. |
SM1[HW].SRAM:ECC SM1[HW].SRAM:EDC SM1[HW].SRAM:ADDRMON SM1[HW].SRAM.ECC:LOCKSTEP |
4.2.4 相互免干扰
软件进行相关失效分析(Dependent Failure Analysis)后识别到支持软件相互免干扰要求的硬件特性。
表4-5为AURIX-TC275的描述内容(部分)。
表4-5: AURIX-TC275相互免干扰描述
| Dependent Failure Initiator | Hardware features | Safety mechanisms |
| Timing and execution |
Enable the application to verify that the static timing properties of the safety related tasks are met during run-time. Provides internal watchdogs. There is one internal watchdog per CPU, plus one Safety watchdog. |
SM1[HW].WDT |
| SM1[HW].SWDT | ||
| SM1[HW].CPU:TPS | ||
| Memory |
Supported by the Memory Protection Unit (MPU) of the TriCore CPU. Each shared memory implements a region accessprotection mechanism. |
SM1[HW].CPU.DATA:MPU |
| SM1[HW].CPU.CODE:MPU | ||
| SM1[HW].CPU.BUS:MPU | ||
| Resource |
The modules connected on the SPB implements a register access protection. With this safety mechanism all the configuration registers can only be written by selected masters. Write accesses from forbidden masters are blocked and cause a bus error. |
SM1[HW]. |
| SM1[HW].CPU:SV | ||
| SM1[HW].CPU:USER1 | ||
| SM1[HW].CPU:USER0 |
4.2.5 输入输出
描述ECU级别的硬件信号与MCU的端口/引脚和软件输入/输出变量之间的关系,表4-6为其示例。
表4-6: AURIX-TC275软硬件接口输入输出示例
| 序号 | 层 | 描述项 | 内容 |
| 1 | 追溯信息 | Relevant TSRs | TSR267 |
| 2 | Relevant HSRs | FT_FUN_022 | |
| 3 | Relevant SSRs | SSR_xxx | |
| 4 | 概念层 | Signal Name | DIL_8(HW);HVILFlg |
| 5 | Signal ASIL | QM | |
| 6 | Signal Description | 高压互锁信号 | |
| 7 | Signal Direction | in | |
| 8 | Remark | 低有效开关 | |
| 9 | 物理层 | Physical Signal property | Boolean[Open, Close] |
| 10 | Input Signal Property of ECU |
Close:Input voltage = INT_PULLUP Open:Input voltage = GND 输入电压范围:0~36V 滤波时间常数:1ms 1:Vin>3.4 0:Vin<2.3 |
|
| 11 | ECU pin | pin47 | |
| 12 | Processing Module | 高压互锁信号采样处理 | |
| 13 | Processing Module Description | 内部上拉,滤波时间常数80ms | |
| 14 | Property of Processing Module | 内部上拉,滤波时间常数80ms | |
| 15 | MCU pin | pin77 | |
| 16 |
MCU Peripheral/module number/ Channel number |
P33.7 | |
| 17 | Input Signal Property of MCU | NA | |
| 18 | Config of MCU Peripheral Module | Port、Dio | |
| 19 | Remark | NA | |
| 20 | 数据层 | Data Register Name and Address | MCAL P33.7 |
| 21 | Data Type | NA | |
| 22 | Data Range | NA | |
| 23 | Trigger Event and time constraint | NA | |
| 24 | Remark | NA | |
| 25 | 表达层 | Variable name | NA |
| 26 | Variable type | NA | |
| 27 | Default value | NA | |
| 28 | Variable range | NA | |
| 29 | Update period | 10ms | |
| 30 | Remark | NA |
4.2.6 中断
描述系统所有中断分配情况,包括中断源、中断频率、中断服务程序的职责,以及其他相关的信息等,表4-7为其示例。
表4-7: AURIX-TC275软硬件接口中断示例
| 序号 | 描述项 | 内容 |
| 1 | Module | GPT_Atom0_Ch0 |
| 2 | No | 10 |
| 3 | ISR | GTMATOM0SR0_ISR |
| 4 | Description | GPT中断,用于生成OS时钟 |
| 5 | ASIL | ASIL D |
| 6 | CAT Configuration | 二类中断 |
| 7 | Priority Number | 10 |
| 8 | ISR frequency (nominal) | 100Hz |
| 9 | ISR frequency (worst-case) | 100Hz |
4.2.7 内存分配
描述系统所有用到的RAM空间、FLASH空间、EEPROM空间的分配方案,表4-8为其示例。
表4-8: AURIX-TC275软硬件接口内存分配示例
| 序号 | 描述项 | 内容 |
| 1 | Start Address / 起始地址 | 0xA0028000 |
| 2 | Size / 存储空间 | 64K |
| 3 | Type / 存储类型 | PFlash |
| 4 | Access / 访问方式 | Read Only / Programming |
| 5 | ASIL | ASIL D |
| 6 | MPU | Y |
| 7 | ECC/EDC | N |
| 8 | Usage in Project / 项目中的用途 | 标定区 |
| 9 | SW Independent Requirement / 软件对独立性的要求 | Y |
4.2.8 访问机制
描述硬件设备间的访问机制(Serial,parallel,slave,master/slave),表4-9为其示例。
表4-9: 软硬件接口访问机制示例
| MCU | Other hardware devices | Access mechanism |
| MCU | SBC(FS8510) |
通讯类型:SPI 通信属性:MCU为master,SBC为slave |
| MCU | Low-Side(TLE8110) |
通信类型:SPI 通信属性:MCU为master,TLE8110为slave |
4.2.9 硬件诊断
描述硬件的诊断特性和响应的安全机制及软件的实现,表4-10为其示例。
表4-10: 软硬件接口硬件诊断示例
| Diagnostic features | Safety mechanisms | Configuration OF SW |
| L9945过温故障 | ssr_xxx | 通过软件启用:寄存器读取 |
| FS8510过温故障 | ssr_xxx | 通过软件启用:寄存器读取 |
4.2.10 时间约束
描述系统安全机制中硬件与软件所用时间,表4-11为其示例。
表4-11: 软硬件接口硬件诊断示例
| Sequence No / 顺序号 | HW Side / 硬件 | SW Side / 软件 | Time Consume(ms) / 所用时间 | Total Reaction time(ms) / 总共反应时间 |
| 1 | Sample Switch signal and converter it to digital value | SW calucate the switch state and Signal Valid check | 80 | 80 |
4.3 技术安全概念
技术安全概念的目的是从功能安全概念中导出技术安全需求,设计技术安全概念,并且将技术安全需求分配到相关项的初始架构中。
4.3.1 系统功能描述
系统功能如表4-12所列,文档中需要对每项功能进行详细描述。
表4-12: 系统功能描述示例
| 功能ID | 功能名称 | 功能描述 | 和其他Item/Element的依赖关系(信号接收对象) |
| F001 | 蠕行控制 | 根据当前挡位状态、车速计算蠕行需求扭矩,使车辆在水平路面能维持稳定车速在5km/h附近。 | MCU |
| F002 | 车辆加速控制 | 结合挡位信息、驾驶模式、车速与油门踏板深度信息,计算当前驾驶员需求扭矩。 | MCU |
| F011 | 挡位控制 | 根据从挡位操纵器采集到的R/N/D挡信号有效性及制动开关、充电枪插枪信号、主驾车门开关信号、车速等信息判断是否进行挡位切换以及是否发送驻车请求信号 | MCU、EPB |
| F044 | 充电高压上下电控制 | 当插入充电枪给车辆进行充电,车辆满足充电要求时,VCU控制整车高压上下电,将高压连接指令发给BMS,由BMS闭合高压继电器 | BMS、OBC |
4.3.2 系统初始架构设计
设计VCU整体初始系统架构并按照表4-13、表4-14和表4-15分别进行功能、外部接口和内部接口描述。
表4-13: VCU初始架构功能描述示例
|
模块名称 Element Name |
功能ID Function ID |
功能描述 Function Description |
| EMC处理电路 | F195 | 低压电源输入EMC处理 |
| 电源管理 | F136 | 休眠、唤醒功能 |
| F100 | 内部功能模块供电 | |
| F135 | 外部传感器、功能模块供电 | |
| 直流充电口唤醒信号处理 | F178 | 直流充电口唤醒信号处理 |
表4-14: VCU外部接口描述示例
| 逻辑接口 | 接口类型 | 方向 | Connector Name |
| 低压电池电压输入 | Power(6-28V) | Input(LV Battery→VCU) | 接插件1 |
| KL15 ON信号 | 高有效输入 | Input(启动开关→VCU) | 接插件1 |
| Start信号 | 高有效输入 | Input(启动开关→VCU) | 接插件1 |
| N档请求信号 | 数字信号(低有效) | Input(挡位控制器→VCU) | 接插件1 |
表4-15: VCU内部接口描述示例
| 逻辑接口 | 接口类型 | 方向 |
| Torque request信号输入 | CAN(0-5V) | CAN Transceiver→MCU |
| Operating Mode信号输入 | CAN(0-5V) | CAN Transceiver→MCU |
| Crash Signal信号输入(VCU) | CAN(0-5V) | CAN Transceiver→MCU |
| KL15唤醒信号 | 数字信号 | KL15唤醒信号处理→275 |
4.3.3 基于系统初始架构的安全分析
安全分析首先需要设计功能失效列表;再依次进行外部非电气接口失效矩阵分析、约束性需求失效矩阵分析、配置功能失效矩阵分析和共享资源安全完整性分析;最后分别对系统失效顶事件进行安全分析。
(1)功能安全目标
表4-16为功能安全目标的设计示例。
表4-16: 功能安全目标设计示例
| 序号 | 描述项 | 内容 |
| 1 | 整车级功能 | VF002车辆加速控制 |
| 2 | 编号 | SG001 |
| 3 | 安全目标 | 避免驱动控制提供驱动扭矩过大,导致车辆碰撞或车轮打滑 |
| 4 | ASIL | ASIL B |
| 5 | 安全状态 | 切断扭矩输出 |
| 6 | 单点故障 | ≥ 90 % |
| 7 | 潜在故障 | ≥ 60 % |
| 8 | 失效率 | < 100Fit |
| 9 | FTTI | 300ms |
| 10 | FHTI | 300ms |
(2)功能失效列表
根据功能安全目标提炼出功能失效列表,这是进行安全分析的基础,如表4-17所列。
表4-17: 功能失效列表示例
| 序号 | VCU系统失效顶事件 | SG追溯 |
| 1 | 驱动扭矩正过大/非预期输出正扭矩 | VF001-SG001、VF002-SG001、VF002-SG003、VF003-SG002 |
| 2 | 制动优先功能无法激活 | VF006-SG001 |
(3)顶事件安全分析
使用与图4-2类似的FTA进行安全分析,输出表4-18所示的单点故障和潜伏故障列表。
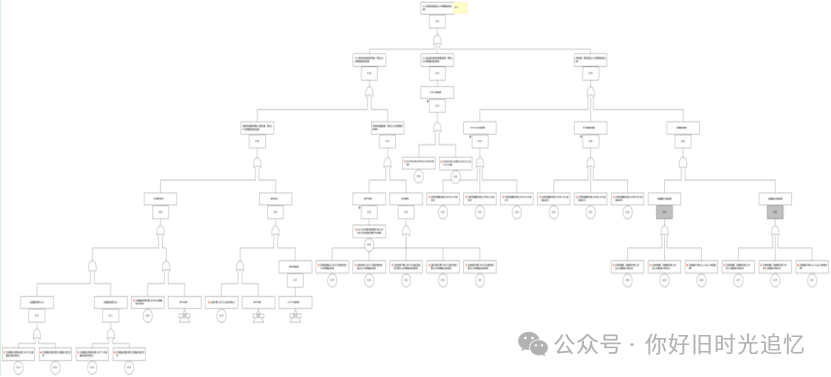
图4-2: FTA安全分析示例
表4-18: 单点故障和潜伏故障列表示例
| IDs of Events | Events of Cut Set | SM Design | 2nd level SM Design |
| E205 | • [E205] [为VCU软件算法提供硬件平台] [MF068] 为软件提供的硬件平台故障 |
SM_SPF_003 SM_SPF_004 SM_SPF_006 |
SM_LF_001 SM_LF_003 |
| E230 | • [E230] [内部功能模块供电] [MF081] MCU控制器供电过压 | SM_SPF_001 | SM_LF_002 |
4.3.4 安全机制设计
分别设计单点故障和潜伏故障的安全机制,参见表4-19和表4-20。
表4-19: 单点故障安全机制设计示例
| SM ID | SM_SPF_001 |
| SM Name | Microcontroller 供电电压监控 |
| Fault detection / tolerance method | SBC监测到Microcontroller 供电电压(3.3V)低于2.97V(10%)并持续40us,确认其欠压故障;检测到Microcontroller 供电电压高于3.63V(10%)并持续45us,确认其过压故障 |
| FDTI | 40us |
| Fault handling |
(1)供电电压出现欠压故障,向L1层发送故障信息,寄存器VMON3报告欠压故障(须手动清除);FS0B引脚拉低通知Microcontroller芯片,同时停止CAN通讯(此时MCU可以正常工作) (2)供电电压出现过压故障,向L1层发送故障信息,寄存器VMON3报告过压故障(须手动清除);为了保护芯片,Microcontroller供电电压监控模块需要关断电压输出,同时停止CAN通讯(此时MCU可以正常工作) |
|
Fault warning (related to LF) |
ICU检测到VCU CAN通信停止,在200ms内点亮红灯闪烁+蜂鸣 |
| FRTI | TBD |
| Fault Recover | 下个点火循环 |
| Degraded Mode | Degraded 4 |
| SPF Diagnostic Coverage | 99% |
| LF Diagnostic Coverage | 99% |
| Remark |
表4-20: 潜伏故障安全机制设计示例
| SM ID | SM_LF_001 |
| SM Name | Microcontroller潜伏故障监控 |
| Fault detection / tolerance method | Microcontroller应采用针对单点故障或双点故障的二级安全机制 |
| FDTI | 上电初始化完成 |
| Fault handling | Microcontroller进入不可恢复的故障模式 |
| Fault warning | Microcontroller在200ms内将故障指示红灯常亮警告信息发送给IC。IC红灯常亮并用文字或故障码提示驾驶员。 |
| FRTI | 上电初始化完成 |
| Fault Recover | Microcontroller重启且自检无故障后恢复 |
| SPF Diagnostic Coverage | N.A |
| LF Diagnostic Coverage | 90% |
| Remark |
4.3.5 其他
技术安全概念还应包含下列内容:系统降级策略;非功能相关的技术安全需求(试验需求、机械结构安装需求、硬件指标需求、共存需求、独立性需求等);生产、运行、服务和报废需求规范;最终输出系统安全整体架构。
5 功能安全软件开发
VCU功能安全软件阶段设计按照V流程的步骤进行,包括软件需求分析、软件架构设计、软件单元设计、软件单元测试、软件集成等步骤,软件集成测试和嵌入式软件测试分别由HIL和实车测试工程师负责。
5.1 软件安全需求
本阶段定义或细化由技术安全概念和系统架构设计规范导出的软件安全需求,并描述软件实现所需的安全相关功能和特性。
5.1.1 需求列表
表5-1为软件需求列表的示例。
表5-1: 软件需求列表示例
| 编号 | 功能项 | ASIL等级 | 备注 |
| 1 | 加速踏板传感器信号范围诊断 | ASIL B | X.X节 |
| 2 | 加速踏板传感器信号比较监控 | ASIL D | X.X节 |
| 3 | 加速踏板传感器信号合理性校验 | ASIL D | X.X节 |
| 4 | 制动踏板传感器信号诊断 | ASIL D | X.X节 |
| 5 | E2E保护 | ASIL D | X.X节 |
5.1.2 模式转换
主要用于描述当前系统不同行为模式(例如上电模式、下电模式、运行模式、故障模式等)及各个行为模式的功能,模式之间的切换条件等。
5.1.3 功能描述
对软件功能进行详细描述,表5-2为功能描述示例。
表5-2: 软件安全需求功能描述示例
| SSR_ID | VCU_SSR104 |
| Corresponding TSR ID | TSR166 |
| ASIL Class | ASIL B |
| Function Description |
[VCU_ECU_SW]应该根据上一时刻挡位信号、当前挡位信号、车速信号、扭矩信号和制动踏板信号等判断挡位是否跳转,判断逻辑如下: 车辆静止时(车速小于0.5km/h)需同时满足以下条件: 1) 上一时刻挡位信号为N挡,当前挡位信号为D挡; 2) 挡位故障标志位=0; 3) KL15信号=ON; 4) 制动踏板信号=1; 5) 充电线未连接(A+信号以及OBC_CC信号); 车辆非静止时(车速大于0.5km/h)需同时满足以下条件: 1) 上一时刻挡位信号为N挡,当前挡位信号为D挡; 2) 挡位信号故障标志位=0; 3) KL15信号=ON; 4) 扭矩绝对值<6 Nm; 5) 充电线未连接; 当以上条件满足时,输出N挡转D挡允许标志位=1 |
| Operation Mode | |
| Status | PROPOSED |
| Verification Method | Software test & Review |
| Comments | 0:OFF,2:ON,3:START |
5.1.4 设计约束
设计约束包括功能启动时间、负载率、内存空间使用率、空间分配、共存需求和独立性需求等,表5-3为其设计示例。
表5-3: 软件安全需求设计约束示例
| SSR_ID | VCU_SSR183 |
| ASIL Class | QM |
| Function Description |
[VCU_ECU_SW]应满足如下负载率的要求: CPU使用率:<80%; 中断负载率:<50%。 |
| Status | PROPOSED |
| Verification Method |
Software test & Review or Review 使用测试工具评(如RVS)估出CPU使用率和中断负载率是否满足要求。 |
| Comments |
5.2 软件架构设计
软件架构设计以层次结构的形式表示软件架构要素以及他们的交互方式。描述了静态方面,如软件组件之间的接口;动态方面,如进程序列和时序行为。
软件架构设计既要满足软件安全要求,又要满足其他软件要求。因此,在该子阶段中,与安全相关和非安全相关的软件要求在同一个开发过程中处理。
5.2.1 软件架构总体描述以及分层视图
本项目的软件架构基于AUTOSAR架构开发,应用层开发方式为基于模型设计(MBD),底层购买自第三方(ETAS AUTOSAR)。
VCU软件架构如图5-1所示。
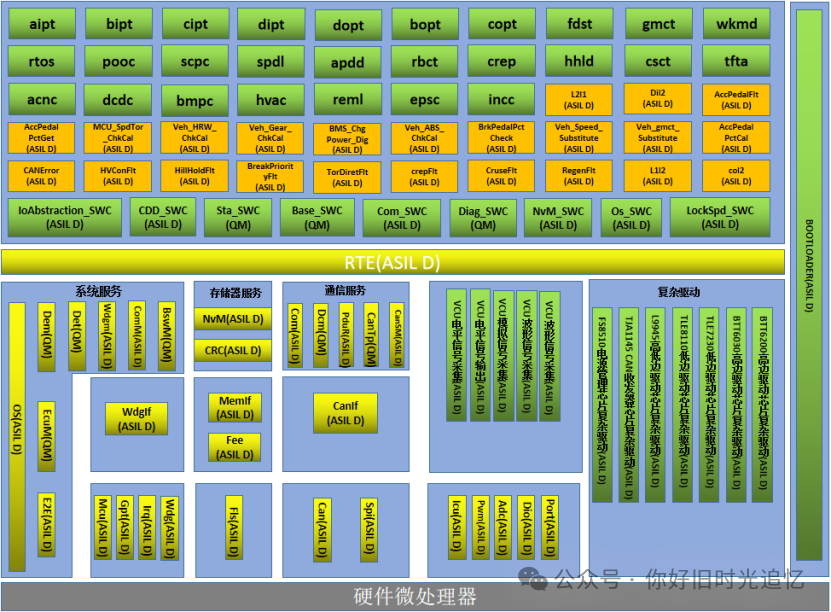
图5-1: VCU软件架构图
5.2.2 软件组件设计
分别描述软件架构中各组件的组件描述、组件图和接口描述等,表5-4、图5-2、表5-5和表5-6分别为对应的示例。
表5-4: 组件概览示例
| Component ID | VCU_031 | |
|
分层 Layer |
App layer | |
|
组件职责 Responsibility |
1.将模拟量采样结果传递给应用层 2.将开关量采样结果传递给应用层 |
|
|
对应需求文档章节 Matching Requirement |
ALL | |
|
实现方式 Source |
Coding | |
|
ASIL等级 ASIL Class |
ASIL_D | |
|
资源消耗 Resource Consumption |
Flash | N.A |
| RAM | N.A | |
| EEPROM | N.A | |
| CPU | N.A | |
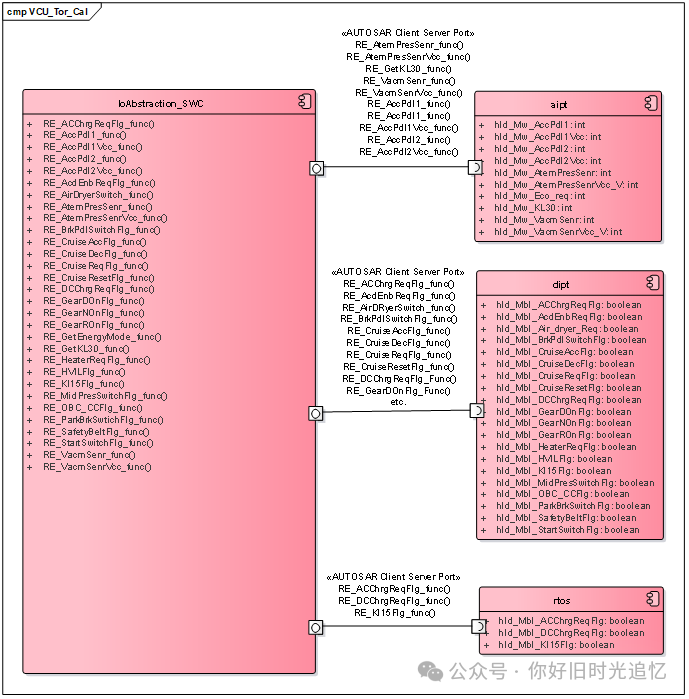
图5-2: 软件组件图示例
表5-5: 软件组件数据接口描述示例
| 名称Name | 描述Description |
| hld_Mw_AccPdl2Vcc | 参考附录[数据字典] |
| hld_Mw_AccPdl1 | 参考附录[数据字典] |
| hld_Mw_AccPdl1Vcc | 参考附录[数据字典] |
表5-6: 软件组件函数接口描述示例
|
Function Prototype 函数原型 |
|
| void RE_AccPdl2Vcc_func (uint16 *hld_Mw_AccPdl2Vcc) | |
|
Parameter Specification 参数说明 |
|
| hld_Mw_AccPdl2Vcc | 加速踏板2电源电压信号指针 |
|
Return Value 返回值 |
|
| Void | None |
|
Functional Description 功能描述 |
|
| 该API函数的主要功能是:将加速踏板2电源电压信号传递给应用层 | |
5.2.3 动态行为
动态行为常见的描述方式有以下三种:时序图(Sequence Diagram)、活动图(Activity Diagram)和交互纵览图(Interaction Overview Diagram)。动态行为描述的对象基于系统级功能列表,对其功能进行描述。
图5-3为动态行为图示例。
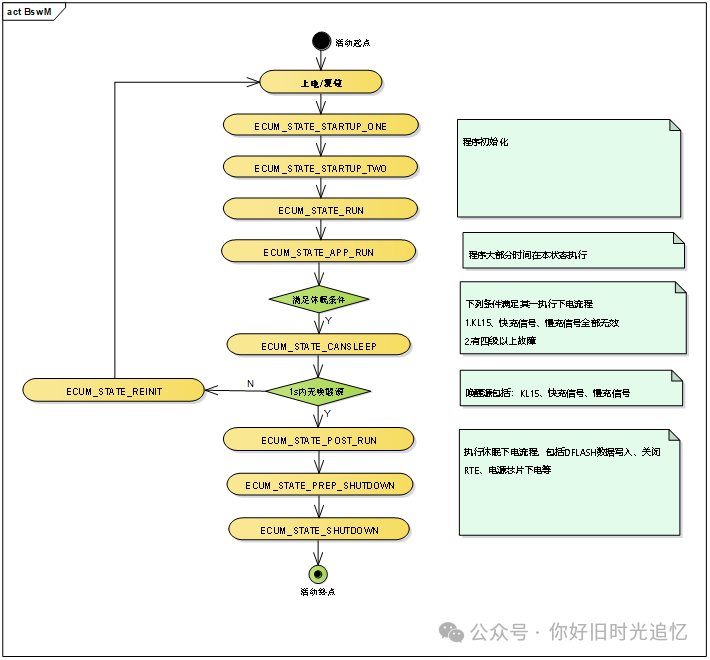
图5-3: 动态行为图示例
5.2.4 任务调度和任务分配
描述系统所有任务的调度策略及任务划分,抢占属性,调度周期和优先级等。任务划分时,需考虑便于实现不同ASIL等级之间的免干扰性。
5.2.5 资源预估
计算CPU在不同调度周期(如:1ms、5ms、10ms、100ms、1s)的使用率以及软件系统所用到RAM空间、FLASH空间、EEPROM空间的分配方案。
5.2.6 资源冲突和控制流监控
所有存储在同一个字节中的全局标志应视为共享资源,对于有共享资源冲突的使用需要保护。
控制流监控有三种类型:活跃性监控(Alive Supervision)、最后期限监控(Deadline Supervision)和逻辑监控(Logic Supervision)。
本步制定在资源冲突和控制流监控时的安全机制。
5.3 软件单元设计和实现
软件单元设计和实现的目的是按照软件架构设计、设计准则和所分配的支持软件单元实施和验证的软件要求,进行软件单元设计;并实现所定义的软件单元。
5.3.1 软件功能简述
描述软件单元实现的功能。
5.3.2 组件源码文件
罗列程序文件名称及其实现的功能,表5-7为组件源码文件示例。
表5-7: 组件源码文件示例
| No.编号 | Filename文件名称 | Description描述 |
| 1 | AccPedal_Mon.c |
该组件功能的实现.c文件,包含该组件运行时所有函数的定义 The implementation of the component's function. c file, containing definitions of all the functions that the component runs on |
| 2 | AccPedal_Mon.h |
该组件功能的实现.h文件,包含该组件所有变量、函数的声明 H file containing the declaration of all variables and functions of the component |
| 3 | Vcu_ADC.h |
该组件功能的实现包含的.h文件,包含ADC转换组件所有变量、函数的声明 The implementation of the component's functionality includes an. H file that contains declarations of all variables and functions of the ADC conversion component |
| ...... | …… | ...... |
5.3.3 静态框图
可以通过约定的方式展示组件静态框图,包括组件内单元的结构关系及单元之间的接口,且保持整个组件设计与架构中组件定义保持一致。图5-4为静态框图示例。
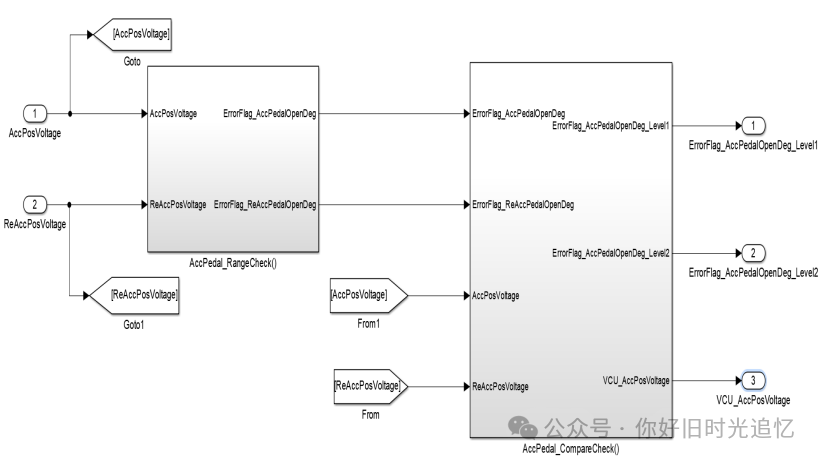
图5-4: 软件单元静态框图示例
5.3.4 单元接口
描述单元间输入、输出信息,或使用表格的形式展示,也可单独管理接口信息,参见数据字典。表5-8为软件单元接口示例。
表5-8: 软件单元接口示例
|
序号 No. |
Interfaces | DataType | InitValue | Dim | Units | Min | Max | Resolution | Description | Ex/Inter |
| 1 | AccPosVoltage | Unit16 | 0 | 1 | V | 0.7 | 4.5 | 0.01 |
加速踏板信号 Accelerator pedal signal |
In/Ex |
| 2 | ReAccPosVoltage | Unit16 | 0 | 1 | V | 0.35 | 2.25 | 0.01 |
冗余加速踏板信号 Redundant accelerator pedal signals |
In/Ex |
5.3.5 动态行为
基于SWC在架构设计中的动态行为及要求实现的软件功能需求及非功能需求,描述组件内单元之间的动态行为;动态行为描述可以采用时序图、状态机等形式进行。图5-5为软件单元动态行为示例。
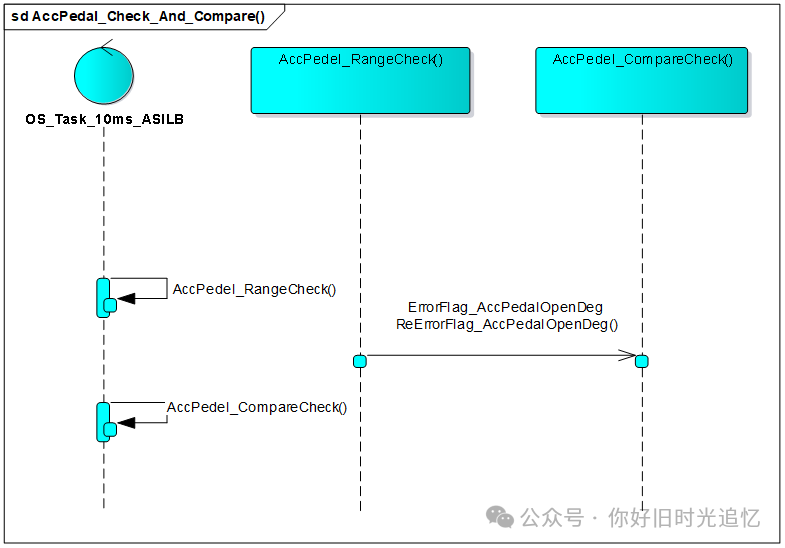
图5-5: 软件单元动态行为示例
5.3.6 变量定义
描述本组件或某单元内部的局部变量、标定量、常量、宏、复合数据等;也可单独管理接口信息,参见数据字典。表5-9为变量定义示例。
表5-9: 软件单元变量定义示例
|
Name 数据定义 |
Type 数据类型 |
InitValue 初始值 |
Description 数据项描述 |
| Local_count_1 | Static Uint8 | 0 |
加速踏板位置故障恢复计数 Accelerator pedal position fault recovery count |
| Loca2_count_2 | Static Uint8 | 0 |
冗余加速踏板位置故障恢复计数 Redundant accelerator pedal position fault recovery count |
| True | Macro | 1 |
故障位真 Fault bit true |
5.3.7 配置项设计
描述可在线配置和离线配置的配置项,离线指修改参数后再次编译,在线是通过诊断服务的方式进行配置项修改。表5-10为配置项设计示例。
表5-10: 软件单元配置项设计示例
| No |
Name 名称 |
Description 描述 |
类型 |
Range 范围 |
Definition定义 | 配置方式 | ASIL |
| 1 | 驱动防滑与稳定协调控制功能 | 通过配置来使能/禁能该功能 | Boolean | 0-1 |
1:使能功能; 0:禁能功能 |
离线 | ASIL B |
5.3.8 函数单元设计
对软件单元所含各函数的函数原型、输入输出参数、返回值、功能描述、设计思路、实现方法等逐一说明。
5.4 软件单元验证
本步提供证据证明软件单元设计满足分配的软件要求且适合于实施,验证安全分析得出的安全措施得到适当实施,提供证据证明所实现的软件单元符合单元设计,并满足根据所需的ASIL等级分配的软件要求。
5.4.1 软件验证计划和策略
表5-11、表5-12、表5-13和表5-14分别为软件验证计划(Software Verification Plan)、软件单元测试范围(Software Unit Test Scope)、测试工具列表及环境(Test Tool List and Environment)和软件单元验证策略(SW Unit Test)的示例。
表5-11: 软件验证计划示例
|
一级任务 Level 1 task |
二级任务 (具体工作安排) Level 2 task (Specific work schedule) |
工作产品输出 Work product output |
是否裁剪 Whether to crop |
完成情况 | 是否评审 |
备注 Remarks |
|
文档审核 Document Auditing |
软件需求审核 Software requirements review |
AXXXXX_BBB_软件需求评审检查单 AXXXXX_BBB_Software Requirements Review Checklist |
||||
|
软件方案审核 Software Scheme Auditing |
AXXXXX_BBB_软件架构评审检查单 AXXXXX_BBB_Software Architecture Review Checklist |
|||||
| ...... |
表5-12: 软件单元测试范围示例
|
测试模块名称 Test module name |
软件单元名称 Software Unit Name |
是否裁剪(可复用) Whether to clip (reusable) |
复用说明 Whether to clip (reusable) |
是否需要 测试环境 Is it necessary testing environment |
测试环境说明 Test environment description |
备注 Remarks |
| ADC Driver模块 | Initial_ADC | xxx项目的xxx.c的xxx版本 | N |
表5-13: 测试工具列表及环境示例
|
测试工具名称 Test Tool Name |
型号(规格) Model (Specification) |
供应商 Supplier |
工具资质 Tool Qualification |
备注 Remarks |
| Polyspace | R2014b | MathWorks | 代码静态验证/语义分析 | |
| ...... | ||||
|
测试阶段 Test Phase |
测试环境 Test Environment |
备注Remarks | ||
|
单元/模型静态验证 Unit/Integration Model Static Validation |
MIL |
模型静态验证/规则检查 Model static validation/rule checking |
||
| ...... |
表5-14: 软件单元验证策略示例
| Test Case ID | Verification Method | Test Case Name | Test Case Description | Criteria |
Verification Environment |
Verification Resource |
| SW_UT_0xx | Walk-through | Pass | ||||
| ...... |
5.4.2 软件单元测试用例和报告
表5-15为软件单元测试用例和报告的示例。
表5-15: 软件单元测试用例和报告示例
|
用例唯一标识符 Use Case Unique Identifier |
类型 Type |
用例名称 Use Case Name |
级别 Level |
测试步骤 Testing step |
期望结果 Expected results |
实际结果及其他说明 Actual results and other explanations |
实际结果及其他说明 Actual results and other explanations |
| A10000-001-001 | 用例Case | 接口+边界测试Interface + boundary testing | 高 |
t=0ms,设置sigIn=1; t=0-100ms,保持sigIn=1; t=110ms,保持sigIn=2 |
t=0ms,设置sigOut=100; t=0-100ms,保持sigOut=100; t=110ms,保持sigOut=200 |
||
| ...... |
5.4.3 软件模型和代码静态验证报告
表5-16和表5-17分别为软件模型和代码静态验证报告的示例。
表5-16: 软件模型静态验证报告示例
|
Simulink建模规范(版本:V2.0) 章节-3 |
规范内容 Specification Content |
NA 复杂性度量 Complexity Metrics |
ISO26262:2018 | 检查方法 | 是否符合 |
违反规范模型内容描述 Description of the content of the breach model |
说明 |
| HR_cmply_1 | 圈复杂度度量Cyclomatic complexity measure | NA | [ISO 26262, Table1,1a] | MI | Pass | ||
| ...... |
表5-17: 软件代码静态验证报告示例
|
C语言编程规范(版本:C1) 章节 |
规范内容Specification content |
MISRA 2012 |
ISO26262:2018 | 检查方法 | 是否符合 |
违反规范代码内容描述 Description of the content of the code violation |
说明Description |
| 3.1.11 |
在可互换的情况下,应优先使用函数而非宏函数。 In the case of interchangeability, functions should be preferred over macrofunctions. |
[Dir 4.9] [A] | [ISO 26262, Tablex,2h] | QAC | |||
| ...... |
5.5 软件集成和验证
本步定义集成步骤并集成软件要素,直至嵌入式软件完全集成;验证是确保软件架构层面的安全分析得出的已定义的安全措施得到适当实施。
5.5.1 软件集成
软件集成的方法应定义和描述将各个软件单元分层集成到软件组件中的步骤,直到整个嵌入式软件全部被集成。
对于AUTOSAR工具链方式设计的车载嵌入式软件而言,软件集成主要包括基础软件模块间的集成以及基础软件与应用层软件的集成。
5.5.2 集成测试范围
表5-18为软件集成测试范围示例。
表5-18: 软件集成测试范围示例
|
软件需求 Software Requirements |
集成模块名称 Integration module name |
集成类型 Integration type |
测试内容 Test Content |
是否需要 测试环境 Is it necessary testing environment |
测试环境说明 Test environment description |
备注 Remarks |
|
填写软件需求ID Fill in the software requirement ID |
集成Integration: ADC、PWM、OVP、DIO,OS |
部分软件单元集成 |
软件集成测试 软件需求测试 Software Integration Testing Software requirements testing |
5.5.3 集成测试报告
与软件单元测试报告格式相同。
6 功能安全基础软件核心工作梳理
下面列出VCU功能安全项目基础软件的主要工作。
6.1 概念阶段
功能安全概念阶段基础软件工程师工作较少,主要是检查、学习相关项定义和功能安全概念开发,辅助绘制功能安全架构等。
6.2 系统阶段
功能安全系统阶段基础软件的工作如表6-1所列。
表6-1: 系统阶段基础软件工作
| 序号 | 工作项 | 工作内容 |
| 1 | 系统架构图 | 协助系统工程师绘制VCU初始架构图和安全架构图,重点梳理架构图的外层(输入输出)部分 |
| 2 | 软硬件接口 | 基础软件核心工作之一,概念层和物理层可由硬件或基础软件工程师编写;数据层和表达层通常由基础软件工程师编写 |
| 3 | 技术安全需求 | 编写底层相关的技术安全需求,包含看门狗、主控芯片安全机制、电源芯片安全机制、外围芯片故障诊断、总线通信故障、程序流监控、程序刷写故障等 |
| 4 | 技术安全概念 | 编写底层相关模块的安全机制,如供电电压监控、单点故障监控、外部看门狗监控、通信安全完整性等 |
6.3 软件阶段
功能安全软件阶段基础软件的工作如表6-2所列。
表6-2: 软件阶段基础软件工作
| 序号 | 工作项 | 工作内容 |
| 1 | 软件安全需求 | 编写软件安全需求规格说明书中下列模块的功能描述:E2E保护、SBC供电过压欠压检测、软件程序刷写、外部看门狗、内部看门狗、故障码转换与存储、SBC芯片需求、MCU芯片需求等;设计约束中的负载率、空间分配、内存空间使用率等 |
| 2 | 软件架构设计 | 编写软件架构总体描述以及分层视图;完成底层模块组件设计;设计任务调度与任务分配;中断资源分配;CPU使用率和存储空间预估;控制流监控;不同ASIL等级软件模块分区设计 |
| 3 | 软件单元设计和实现 | 功能安全基础软件设计核心部分。含BSW模块(Wdg、WdgM、E2E)设计和实现;OS任务设计与实现(设计原则是不同ASIL等级的软件模块须存在于不同核或同核的不同APPLICATION中);电源芯片安全机制实现;主控芯片安全机制实现;故障信号上传等 |
| 4 | 软件单元验证 | 编写底层模块软件单元验证策略;编写测试用例和报告;软件模块实操测试等 |
| 5 | 软件集成和验证 | 基础软件模块集成;基础软件与应用层软件(L1和L2层的所有模块)集成;编程软件集成验证策略、编写软硬件集成测试测试用例中底层模块相关的部分,含软件刷写、硬件单点故障监控、外部看门狗监控、程序流监控、微处理器潜伏故障、电源监控潜伏故障、SPI通信故障、CAN通信故障等 |
7 项目总结
以上列出了新能源VCU功能安全项目的开发过程,下面简要做个总结。
7.1 标准与项目
功能安全规范只是一份指导性文档,学会满足功能安全的汽车电子设计方法离不开具体项目的工程实践,这个过程可以在专业咨询公司的指导下进行。
7.2 文档与程序工程
功能安全设计不仅仅是编写文档,而是借助文档制定安全目标、设计安全机制、再通过软硬件设计满足车辆安全性需求。最终输出的程序需要在经过HIL、实车测试验证后满足量产要求。
7.3 能力要求
从功能安全项目基础软件部分的工作看,Wdg模块开发需要具备MCAL设计能力;WdgM和E2E模块开发需要具备BSW设计能力;软件集成需要RTE设计能力;不同ASIL等级的任务分配需要OS设计能力;主控芯片和电源芯片安全机制实现需要手册研读和手工编程的能力......应用层软件与硬件工程师的工作也与之类似。因此,开发出一款满足ISO26262的车载ECU需要相关工程师具备全面的设计能力和文档能力。
功能安全不是一门单独的技术,而是软硬件设计的拓展和升华。
7.4 功能安全认证
最后聊一下车辆功能安全工程师考试。具备高含金量的功能安全证书考试具有较高的难度和巨大的题量(据说没有中国考生能做完题),并且考察的内容涉及到标准的各个章节(含术语、概念、系统、硬件、软件、生产等)。做项目肯定有分工,但如果想考证的话,标准各部分的重点知识要尽量多的掌握。
审核编辑:黄飞
-
汽车网络安全 ISO/SAE 21434是什么?(一)2026-04-07 723
-
基于ISO 21434的汽车网络安全实践案例解析2023-04-14 3134
-
人工智能安全工程将如何改变工程2023-01-05 1681
-
ECU/MCU软件开发2021-09-10 2355
-
车载ECU的Bootloader实现方法概述2021-07-23 1757
-
怎么实现车载ECU中USB接口电路供电保护设计?2021-05-14 1632
-
安全工程师在未来几年将大有所为2019-10-13 4584
-
安全工程师的这些事你得知道2019-10-10 4247
-
注册消防工程师与注册安全工程师的区别2019-09-02 4726
-
什么是web安全工程师2019-03-15 8537
-
成为安全工程师需要掌握哪些技能2019-03-07 7013
-
2017安全工程师考前11天该做什么2017-10-17 1907
-
lLinux安全工程师-深圳2014-03-07 2091
-
车载ECU中USB接口电路供电保护设计2009-05-16 2604
全部0条评论

快来发表一下你的评论吧 !
