

释放总线潜力:汽车总线离线模拟解决方案
描述
来源:虹科汽车智能互联虹科方案| 释放总线潜力:汽车总线离线模拟解决方案
欢迎关注虹科,为您提供最新资讯!
#汽车总线 #ECU #汽车网关
导读
传统的ECU模拟工具通常需要依赖上位机软件来发起通信,这在离线场景和自动化产线中带来不便。为了应对这一挑战,虹科推出了创新的汽车总线离线模拟解决方案,基于PCAN-Router系列网关,通过内部可编程固件,实现了自主报文自发功能和实时离线通信,为工程师提供了一个高效、灵活且安全的测试平台。
行业痛点
ECU模拟工具是专为模拟车辆电子控制单元(ECU)之间的通信和行为而设计的软件/硬件设备。它们具备 通信模拟、数据生成与处理、实时模拟能力、故障模拟功能 ,同时具有接口兼容性、调试分析功能和灵活的配置选项。这些工具在汽车电子系统开发、测试和验证中发挥关键作用,帮助工程师验证系统的正确性、稳定性,并加速新功能的开发和集成过程。
常见的ECU模拟工具,会根据不同的总线协议制作搭配上位机使用的“CAN卡”和“LIN卡”。就CAN/CAN FD总线而言, 一般的“CAN卡”都需要上位机发起,并通过软件/接口的形式进行报文的封装并发送,在部分自动化产线、离线场景中很不方便 。
ECU离线模拟的必要性
CAN/CAN FD总线ECU离线模拟工具的离线特性极为关键,允许工程师在不依赖于实际车辆的情况下模拟、分析和验证电子控制单元(ECU)之间的通信。
一方面,这种独立于实际车辆的离线模拟能力为系统开发、故障诊断和性能评估提供了非常重要的环境。不仅节约了在实际车辆上进行测试的成本和时间,更为工程团队提供了一个安全、可控且高效的平台,用于早期发现问题、验证新功能,同时优化系统性能。通过离线模拟,工程师能够更加灵活地、更频繁地进行测试和调试,从而提高系统的稳定性、安全性和可靠性,同时降低整个开发周期所带来的风险。
另一方面,任何一款新的ECU在加入已有的总线之前,都应该通过ECU离线模拟工具进行验证,确保ECU在量产前的通信情况与现有的总线架构是契合的。
汽车总线离线模拟解决方案
虹科基于PCAN-Router两个系列网关,推出了汽车总线离线仿真解决方案。
CAN总线方面:基于PCAN-Router系列网关,通过内部的可编程固件,自行的定义CAN/CAN FD总线报文结构,包括帧ID、DLC、TYPE、DATA等,并通过网关的CAN收发器自动的向总线上发送报文信号,建立实时的离线通信。
ECU模拟:内部的可编程固件基于C语言,可以自由的设定通信过程中报文的反馈效果,以达到ECU模拟的目的。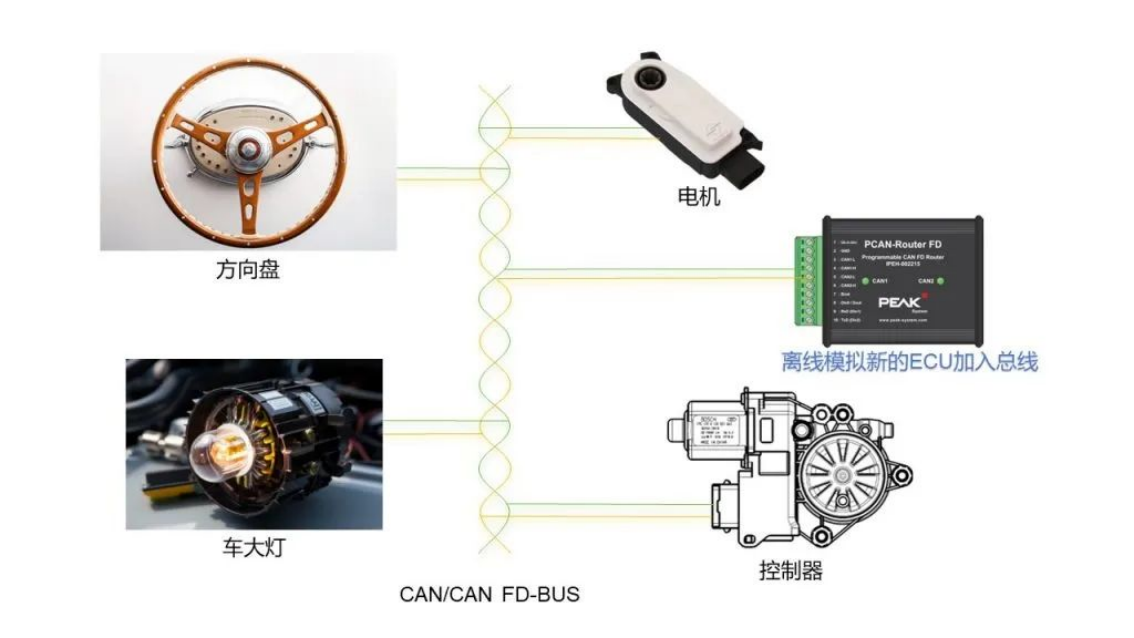
自主通信能力
与传统的ECU模拟方案不同,通过修改PCAN-Router FD的内部固件,实现了一种自主报文自发的功能。这意味着该模拟方法不再需要依赖上位机软件的手动控制来触发或模拟CAN/CAN FD总线上的通信报文。
无需人工干预的自动化模拟
能够自动模拟ECU在CAN/CAN FD总线上的通信行为,无需人工干预。通过修改PCAN-Router FD的内部固件,使其具备智能化的功能,能够根据预设条件或特定触发事件自发生成和响应通信报文。
实时、高效的CAN/CAN FD总线仿真****
提供了一种实时、高效的CAN/CAN FD总线仿真方法。该方法通过内部固件的优化,能够实现对CAN/CAN FD总线上的通信报文更快速、更精确的仿真,进而模拟ECU的实际行为,包括 数据传输速率和数据长度的灵活处理 。
PCAN-Router****FD的固件改进
通过 针对性的固件修改 ,使得设备能够在不需要外部控制的情况下,模拟并响应CAN/CAN FD总线上的通信,从而提升了模拟ECU的效率和准确性。
增强CAN/CAN FD协议的兼容性与灵活性****
不仅能够与传统的CAN协议兼容,还能支持CAN FD协议,提供了更高的灵活性。这种改进使得模拟ECU能够适应各种不同的通信需求和协议变化,从而更好地满足现代车辆和工业系统的通信要求。
结语
随着汽车电子系统的日益复杂化,离线仿真工具在汽车电子系统开发、测试和验证中的重要性愈发凸显。虹科方案推出的基于PCAN-Router两个系列网关的汽车总线离线仿真解决方案为工程师提供了一个高效、灵活且安全的测试平台。通过内部可编程固件自定义报文结构和反馈效果,该方案实现了自主报文自发功能和实时离线通信,满足了工程师对ECU模拟的需求。这种创新的离线仿真方法不仅提高了开发效率、降低了成本和风险,而且增强了系统的稳定性和安全性。在未来,随着汽车电子技术的不断进步和应用需求的多样化,离线仿真工具将继续发挥关键作用,助力工程师更好地应对挑战并推动汽车行业的持续发展。
审核编辑 黄宇
-
labview怎么模拟汽车can总线的波形2012-03-10 4279
-
I²C总线的相关问题及解决方案2020-12-24 1549
-
基于CAN现场总线的同步控制解决方案2021-01-29 2246
-
什么是汽车总线技术?汽车总线技术有哪些特点?2021-05-14 4174
-
CAN总线和以太网两者互相并存的车载网络解决方案2021-08-20 2845
-
步科推出CAM总线系统解决方案2010-04-01 1017
-
汽车总线技术整体解决方案2010-03-11 825
-
USB Host总线解决方案2011-06-01 1713
-
就瑞典Kvaser的CAN总线通讯协议提出的解决方案2020-03-06 1566
-
LeCroy CANBUS总线测试解决方案介绍2020-06-17 1150
-
汽车总线协议转换解决方案2023-08-10 2246
-
汽车总线协议转换解决方案(一)2023-08-01 2381
-
RS485总线浪涌解决方案!2023-09-18 3218
-
虹科方案|释放总线潜力:汽车总线离线模拟解决方案2024-01-30 1264
-
CAN总线关闭故障的解决方案2024-09-30 10590
全部0条评论

快来发表一下你的评论吧 !
