

RT-Thread设备驱动开发指南基础篇—以先楫bsp的hwtimer设备为例
描述
一、概述
(一)RT-Thread设备驱动
RT-Thread设备驱动开发指南》书籍是RT-thread官方出品撰写,系统讲解RT-thread IO设备驱动开发方法,从三方面进行讲解。
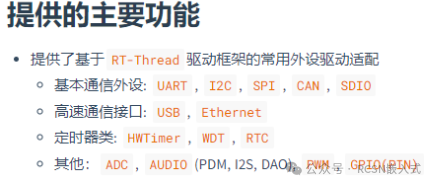
基础篇:对RT-thread以及设备框架进行介绍,再分别介绍基于IO框架中常用的外设设备,分别是UART、PIN、SPI/QSPI、HWTIMER、PWM、RTC、ADC、DAC、WDT。
进阶篇:介绍基于IO框架中稍比基础篇复杂的外设设备,分别是SDIO、Touch、LCD、sensor、MTD nor、MTD nand、脉冲编码器、加解密设备、PM设备。
高级篇:介绍更为复杂的外设设备,分别是WLAN、ETH、audio mic、audio sound、USB、CAN。
(二)先楫hpmicro bsp
为了深入了解本书的内容,得有一个单片机平台进行案例剖析,除了本书籍以STM32的arm平台进行介绍,还可以以先楫hpmicro单片机系列的riscv平台进行讲解。
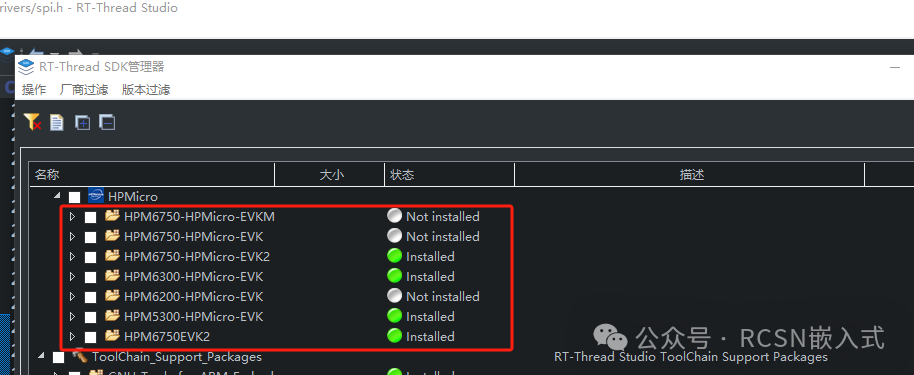
刚好先楫在rtthread的bsp贡献上,也是十分丰富。无论是在rtthread studio的bsp包上,还是rtthread仓库的bsp支持上,都有提供了对应的支持。
rtthread studio的SDK支持,包括了先楫目前所有的MCU系列。
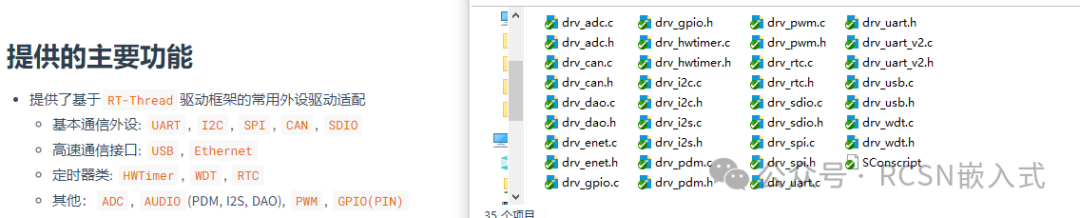
而在RT-Thread上,bsp包的驱动支持上,也包括了rtthread大部分设备驱动。
二、开发方法
(一)层级结构
RT-Thread 提供了一套简单的 I/O 设备模型框架,如下图所示,它位于硬件和应用程序之间,共分成三层,从上到下分别是 I/O 设备管理层、设备驱动框架层、设备驱动层。
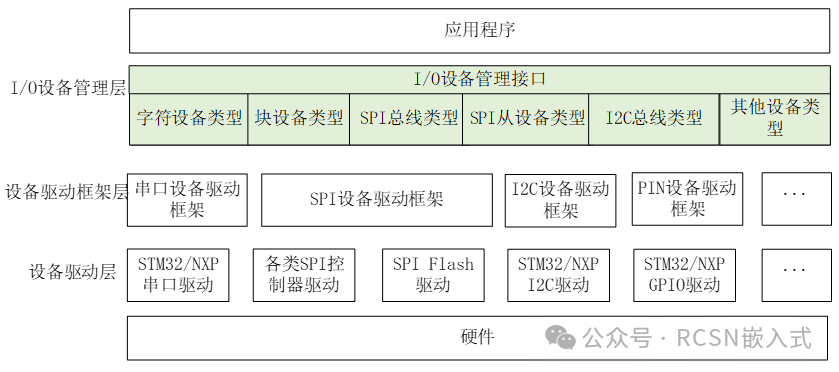
而作为单片机的定时器外设hwtimer功能,要对接到该IO设备框架,需要实现hwtimer设备的操作方法、设备的注册、以及驱动的配置和驱动验证。本文也是基于该开发方法进行阐述。
上述对应的三层驱动层,在源码上,可以device->hwtimer->drv_hwtimer,其中drv_hwtimer是先楫官方实现的对接框架的驱动层。

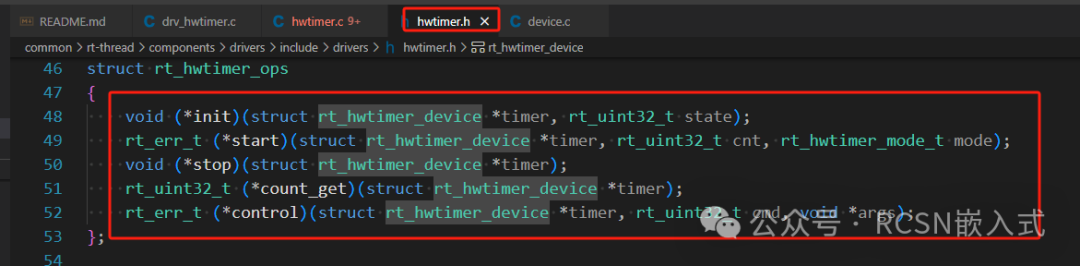
而设备驱动框架层,提供了ops操作接口,分别以下的接口需要驱动开发者实现注册。
(二)创建hwtimer设备
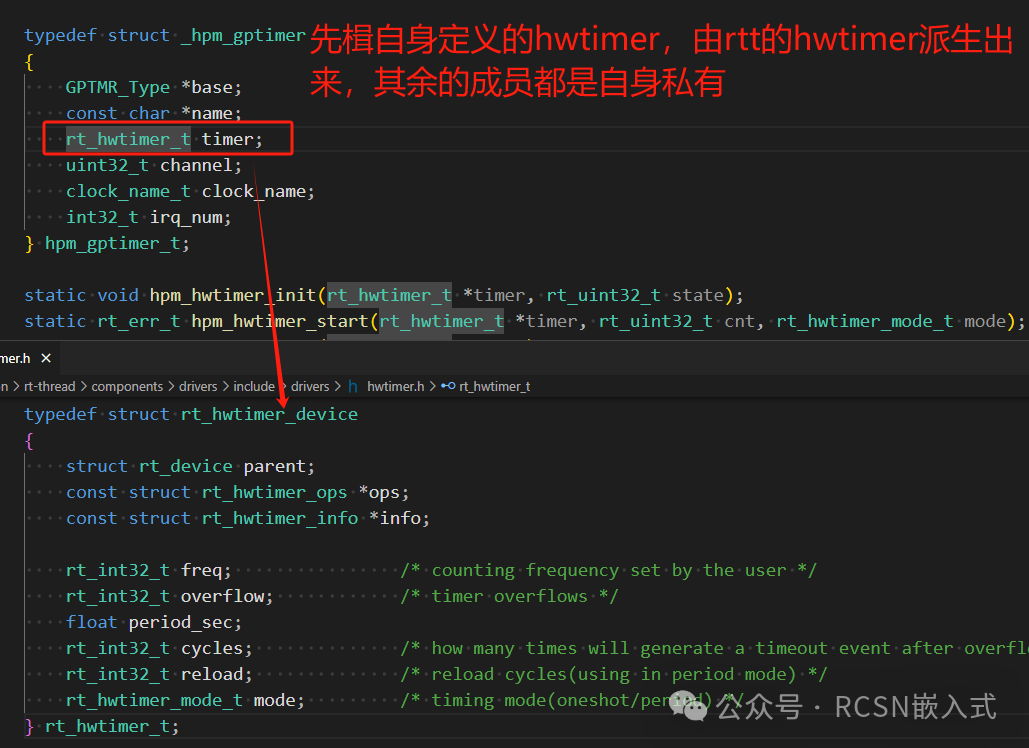
对hwtimer设备来说,在驱动开发时,需要先从rt_hwtimer_t结构中派生出新的hwtimer设备模型,然后根据自己的设备类型定义私有数据域。
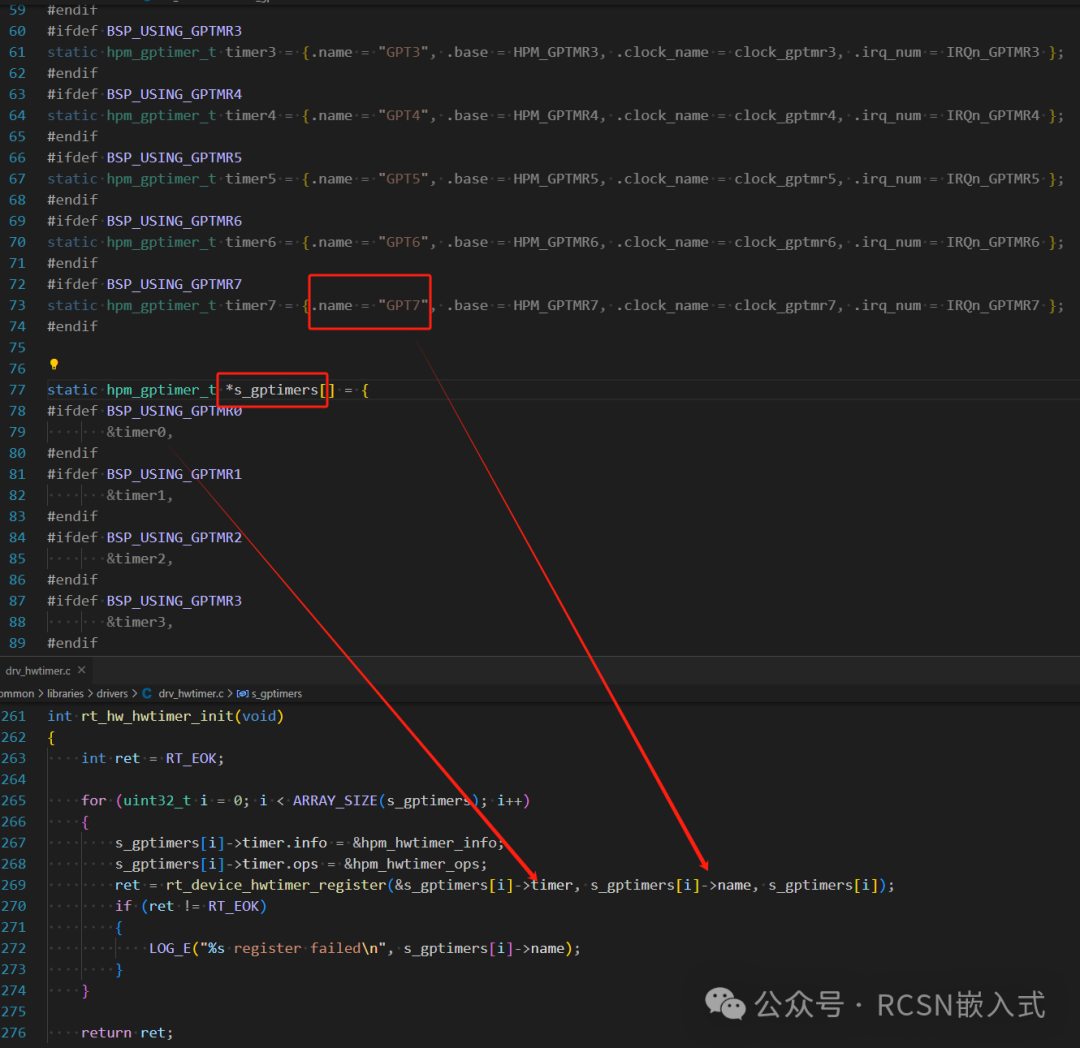
同样先楫的hwtimer drivers也定义了自己的由rt_hwtimer_t派生出来的hwtimer设备。
当然一个MCU也支持多个hwtimer,一个hwtimer驱动可以支持多个hwtimer设备,可以通过使能BSP_USING_GPTMRx进行开启

(三)实现hwtimer设备的操作方法
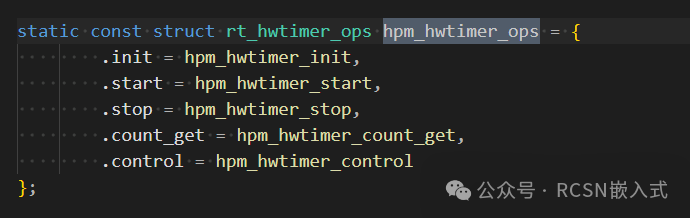
该操作方法就是上述所说的ops操作结构,属于驱动共用部分,也就是多个hwtimer设备可以共用一个ops操作。同样先楫也实现了该操作方法,并且注册到自身的hwtimer的父类hwtimer的ops中。
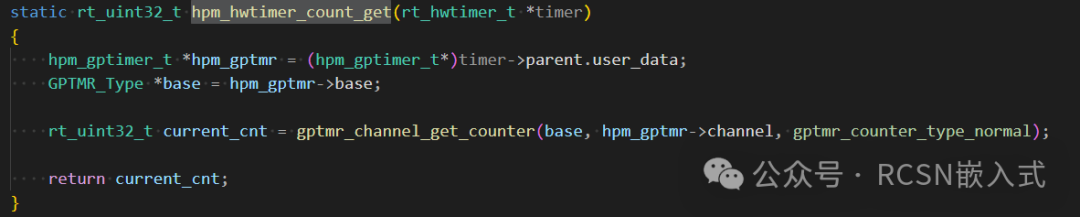
简单举例个操作方法的实现,比如获取设备当前值count_get,原型如下:
rt_uint32_t (*count_get)(struct rt_hwtimer_device *timer);
而先楫实现的count_get是以上的hpm_hwtimer_count_get,可以看到,内部是先从timer获取厂家自身定义的hwtimer设备,再从里面获取硬件定时器的基地址控制句柄,然后使用先楫自身的驱动API获取定时器的计数值进行返回。
(四)注册hwtimer设备
注册hwtimer设备,rtthread的IO设备框架提供了一个API:rt_device_hwtimer_register

从传参句柄可知道,注册时需要提供设备句柄timer,设备名称name,用户自定义data作为传参。
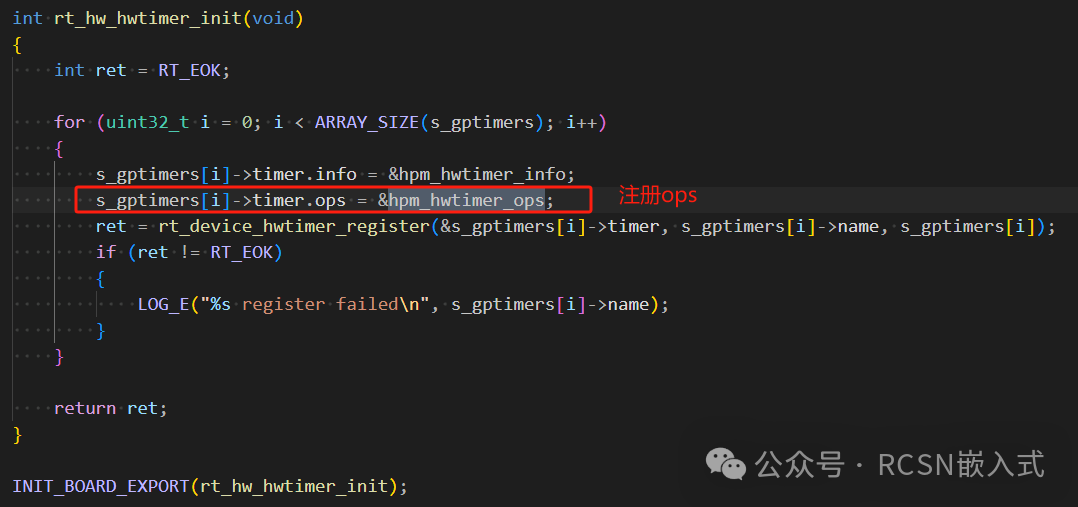
在先楫的drv_hwtimer的驱动中,创建了个全局的hwtimer设备数组,里面包含了hwtimer的所有信息,包括设备名称。然后在注册初始化当中,轮询该数组使能的定时器设备依次注册到rtthread的hwtimer设备当中。
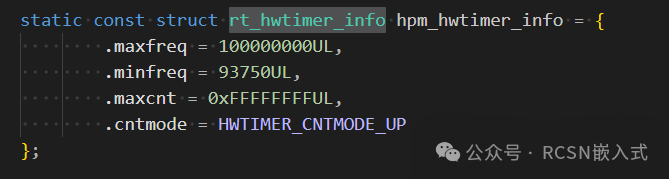
在开发指南当中,特别提到了一个注意点,hwtimer设备句柄需要实现rt_hwtimer_info,定义硬件定时器的特征信息,如计数的最大最小频率,最大计数值以及计数方向,而先楫也同样进行了实现。
(五)hwtimer设备中断处理
在开发指南中,该部分也需要实现,目的是将定时时间导致的中断事件通知到hwtimer设备驱动框架,让驱动框架完成后续的处理并通知应用层。而该通知事件API则是rt_device_hwtimer_isr,该函数由rtthread的hwtimer设备驱动框架提供。

MCU下的hwtimer驱动,需要在中断处理函数调用rt_device_hwtimer_isr函数,以便通知hwtimer设备驱动框架对应中断的发生。
在先楫的hwtimer驱动中也是基于这个实现通知事件。
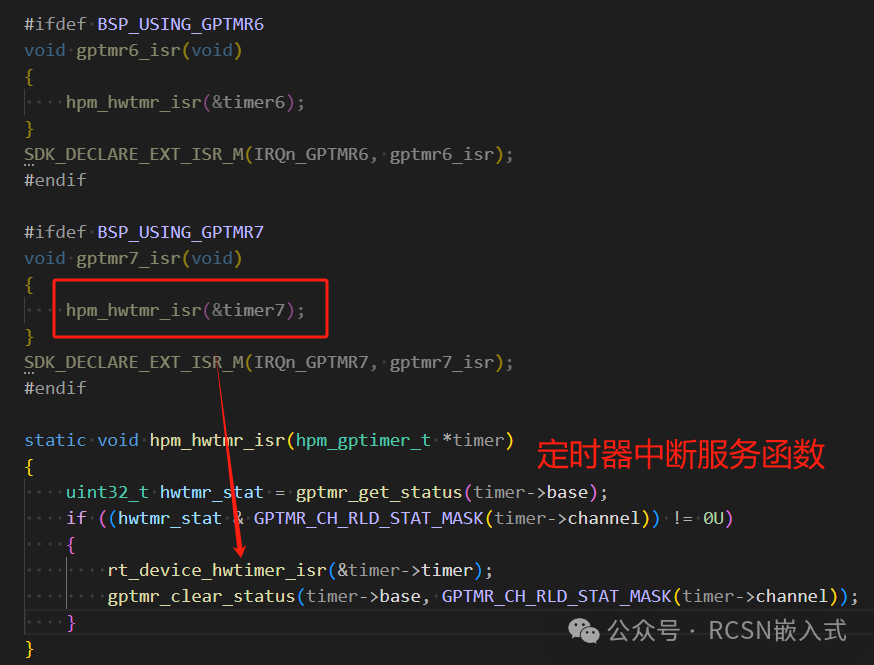
从以上代码可知,hpmicro实现的hwtimer设备驱动接管了定时器的通用中断服务函数hpm_hwtmr_isr,然后内部调用了rtthread的hwtimer设备驱动框架提供的rt_device_hwtimer_isr中断处理函数,通知设备框架对应的定时器定时时间到达。
(六)驱动配置
1、Kconfig配置
驱动配置主要通过Kconfig实现,这里使用hpm6750evk2的bsp V1.4.1作为说明。
在board文件夹中,有个Kconfig配置了hpm6750evk2的板载驱动信息。对于定时器驱动的相关选项如下:
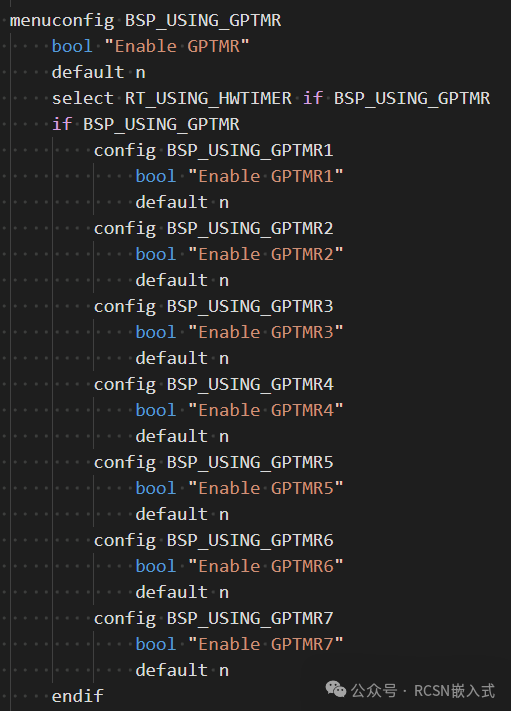
RT_USING_HWTIMER:RT-thread的hwtimer设备驱动框架下的代码对应的宏定义,控制hwtimer的驱动框架的相关代码是否会添加到工程中
BSP_USING_GPTMR:先楫的hwtimer驱动下的代码对应的宏定义,控制先楫的hwtimer驱动是否会添加到工程中
BSP_USING_GPTMR1: 使用先楫的定时器1
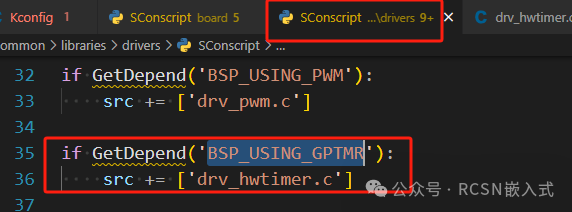
2、SConscript配置
libraries/drivers/SConscript文件为hwtimer驱动添加判断选项,如果定义了BSP_USING_GPTMR,则对应的驱动文件drv_hwtimer就会被添加到工程的源文件中。
三、驱动验证
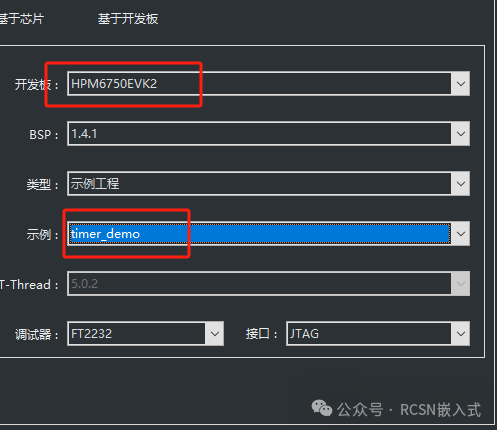
使用hpm6750evk2的bsp V1.4.1作为说明,新建timer_demo的示例工程。
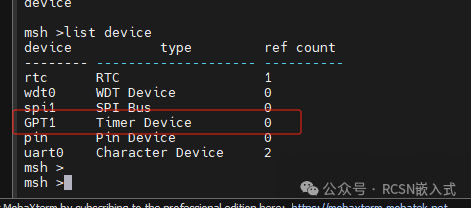
编译烧录代码,使用list_device查看设备,可以看到注册的设备已经包含了hwtimer这个设备。
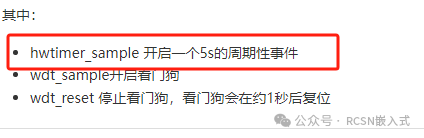
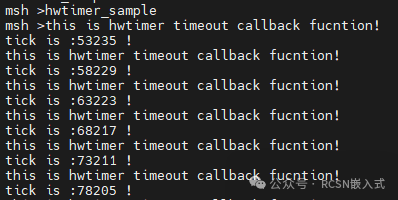
运行自带的shell命令hwtimer_sample,该命令会运行5s的定时,查看readme文档
四、总结
1、基础篇包含UART、PIN、SPI/QSPI、HWTIMER、PWM、RTC、ADC、DAC、WDT这些外设,本文以先楫适配的HWTIMER驱动进行说明,能感受到先楫对于rtthread驱动适配的完整性。
2、除了本文阐述的外设,其他基础外设同样适配完整。
审核编辑:刘清
-
在Ubuntu上开发基于先楫MCU的RT-Thread应用指南2025-08-29 2457
-
【好书推荐】RT-Thread设备驱动开发指南2024-08-01 2427
-
开发者分享 | 基于先楫RT-Thread BSP,使用CLion开发应用2024-06-07 5028
-
RT-Thread驱动开发指南进阶篇-动手驱动先楫未适配的外设LCD2024-02-25 6023
-
《RT-Thread设备驱动开发指南》基础篇--以先楫bsp的hwtimer设备为例2024-02-24 3970
-
先楫 RT-Thread BSP v1.4.0 正式发布2024-02-19 1824
-
RT-Thread BSP v1.3.0 发布2023-11-08 1527
-
上海线下培训:RT-Thread×先楫 HPM5300 for RT-Thread ,高性能 RISC-V 平台开发快速上手2023-11-03 2066
-
RT-Thread使用未默认启用的timer作为硬件定时器HWTIMER的步骤2023-07-19 3764
-
《RT-Thread设备驱动开发指南》读书测评2023-03-26 1684
-
送《RT-Thread设备驱动开发指南》,手慢无!2023-03-19 2824
-
已结束-【书籍评测活动NO.4】RT-Thread官方撰写,涵盖26种设备驱动的开发指南2023-02-22 90388
全部0条评论

快来发表一下你的评论吧 !
