

电机类型划分
电子说
描述
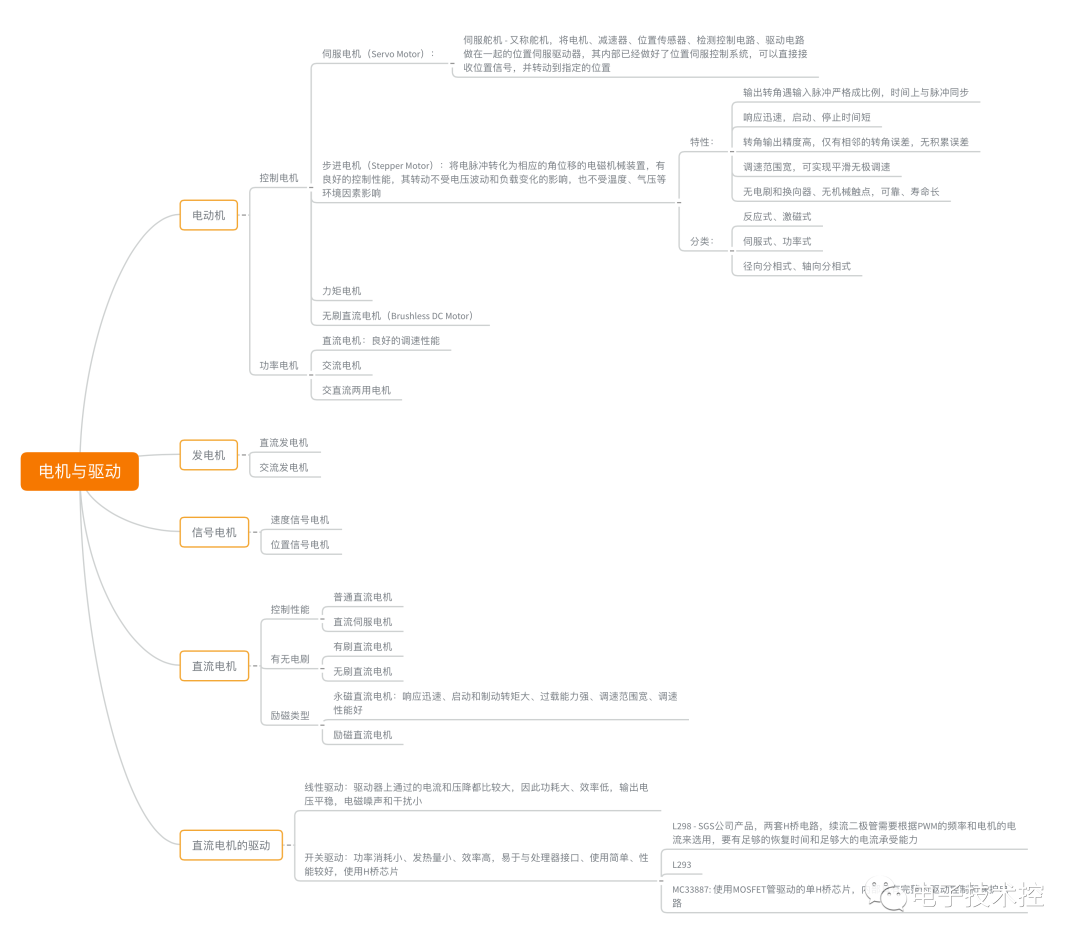
电机是典型的将电能转化为机械能的设备,其是大多数机器人的执行部件。可以说,选择一款性能优越的电机可以使得机器人的性能得到充分的展示。因而电机在机器人中的应用极其广泛。电机的类型划分可以从不同角度给出不同的类别,但是一般工程师是根据自己的实际的需求进行划分:在速度要求高的场合会选择直流电机,精度要求高,速度要求低的场合会选用不仅电机,电机输出功率较大的场合会采用交流电机。
1 电机类型划分
1.1 直流电机
直流电机可以划分为直流有刷电机,直流有刷减速电机,直流无刷电机,直流无刷减速电机。从字面可以理解,直流电机和直流减速电机的区别是直流减速电机的输出轴端安装有电机的减速器,减速器会使得电机的速度明显下降,但是电机的输出力矩会明显增大。
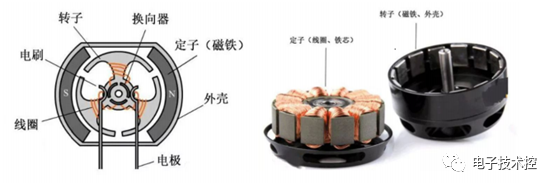
有刷直流电机(左侧)和无刷直流电机(右侧)
直流电机调速范围宽,调速特性平滑。且直流电机的过载能力强,启动和制动转矩大。
1.2 步进电机
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机
步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。
步进电机可以在很宽的范围内改变脉冲频率调速。其典型的应用包括数控机床、绘图仪、轧钢机和记录仪等方面。总之步进电机的特点是:
(1) 快速启动、正反转、停转、在很宽的范围内调速
(2) 一个脉冲对应的位移量小,步距角精度高,不得丢步
(3) 输出力矩大,直接带负载
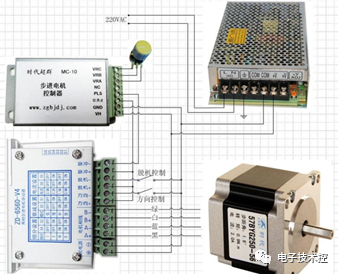
步进电机接线图
1.3伺服电机
伺服电机相对前面的电机类型更加强调电机的闭环控制。一般来说伺服电机会有专门的伺服电机驱动器。且伺服电机可以分为直流伺服电机以及交流伺服电机。
1.4 舵机
舵机是一种方面搭建快速搭建原型机的电机类型。其一般是由小型直流电机+控制电路板+电位计+齿轮组合而成。舵机有多种划分方式。
按照转动角度极限划分,舵机可分为:90度舵机、180度舵机、270度舵机和360度舵机;
按照信号类型可以划分为:模拟舵机和数字舵机;其中模拟舵机中无微控制器,电机由模拟信号控制;而数字舵机是由MCU微控制器控制,性能较好;
按照传动系统划分:金属齿轮舵机和塑料齿轮舵机;其中金属齿轮舵机价高,且扭矩大适合告诉场合,而塑料齿轮舵机属于低成本,适用于中低扭矩场合。
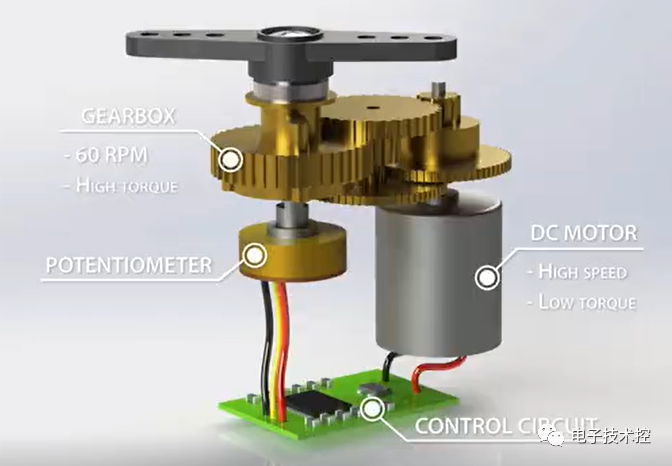
舵机构造
舵机六足机器人
舵机四足机器人跌倒翻身
审核编辑:汤梓红
-
浅谈液晶显示屏的类型划分与显示模式2026-01-24 769
-
想让步进电机控制更顺滑?微步控制优势与挑战全揭秘!2025-02-19 2830
-
三相电机效率怎么划分,如何提高三相电机效率2024-06-10 8674
-
电磁干扰有哪些类型划分?2024-01-11 4179
-
电机的种类该如何划分2022-10-27 3991
-
电机种类划分总述2021-09-13 1328
-
电机功率等级标准划分 电机功率等级表2021-07-21 296312
-
浅谈减速机按传动类型该如何划分2021-03-29 6943
-
TYCO连接器产品类型怎么划分?2019-10-29 1562
-
小功率电机CCC单元划分原则2010-09-24 562
全部0条评论

快来发表一下你的评论吧 !
