

实现相机图像色彩真实还原的关键技术与方法
光电显示
描述
自然界中,根据人的肉眼所能感受到的光的波段范围,分为可见光和不可见光。其中可见光的波长范围是400nm~780nm,不可见光的波长范围是10nm~400nm,780nm~0.1mm。
01
可见光的颜色
在自然界中,人眼所感受到的白光(太阳光),其实是由多种不同颜色的光构成,且每种色彩的光都存在不同的频率。
由于人的肉眼有感知 RGB 三种不同颜色的锥体细胞 ,因此对于光学中的色彩而言,又可将其分解为“三基色”:红(Red)、绿(Green),蓝(Blue),其中每种基色的光的波长范围,也不尽相同(大致范围):
● R:620-780 nm
● G:500-560 nm
● B:430-470 nm
02
还原图像的色彩
在对光和影像的研究和应用上,相机行业应运而生,但相机Sensor(CCD和CMOS)只能接受光的强度,而无法感知光的颜色,也就是不能识别光的频率或者波段,因此如果直接用CCD和CMOS,输出的只能是灰度图像,如下图所示:

< 灰度图像-图片来源于网络 >
为了尽可能得到我们人眼所习惯的彩色图像,尽可能输出色彩还原更真实的图像,人们提出了两种解决方案:
方案1:拜耳阵列方案
这种成本相对较低,是由外国专家bayer提出的:
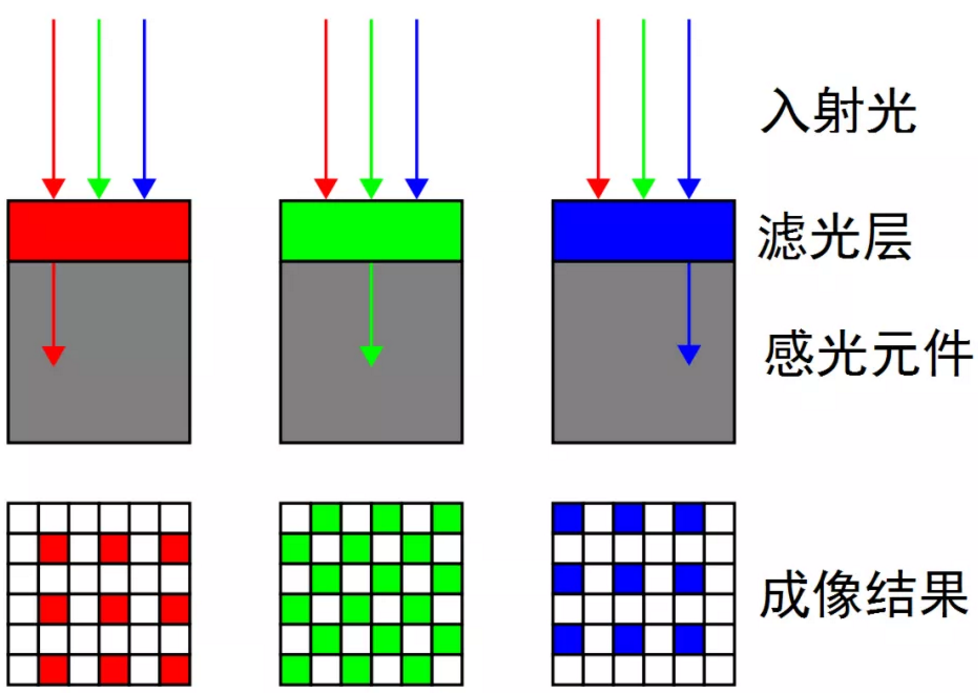
通过在传感器前添加一个下图这样的RGB滤波阵列,使得每个滤光点只能透射一种颜色,并使各个颜色的滤光点与下层像素点一一对应。
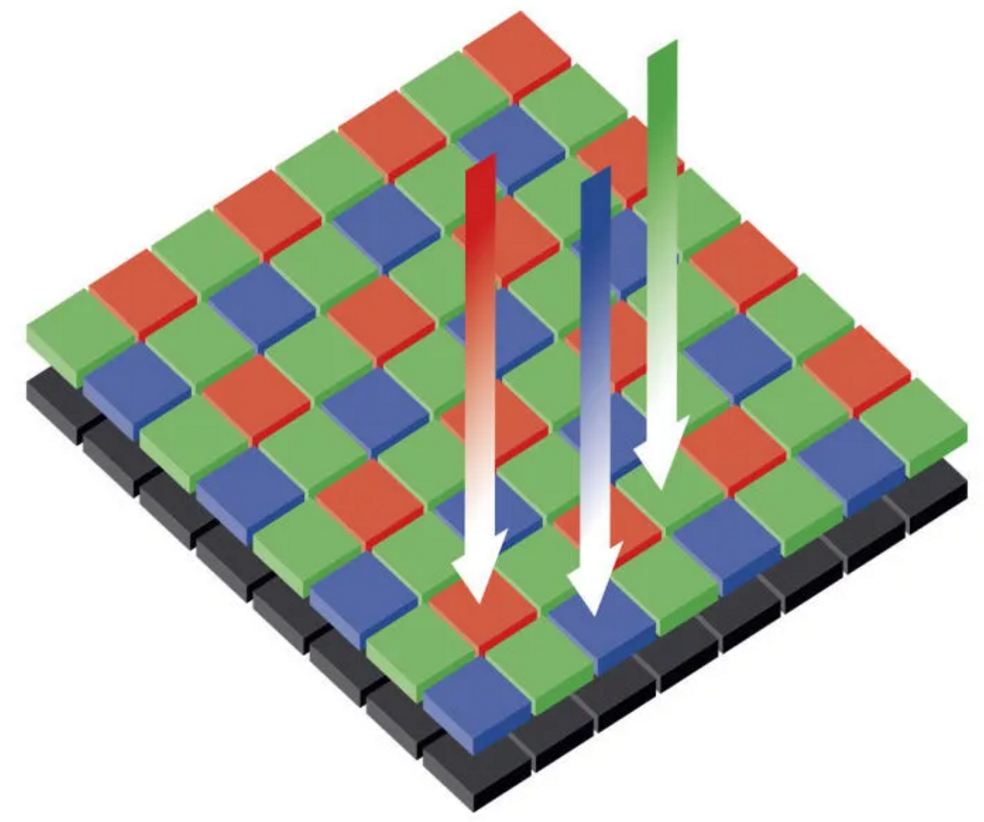
< 拜耳阵列方案-图片来源于网络 >
通过上面这样的方式,可以将上面无色彩的灰度图像处理得到下图所示的红绿蓝强度图,可以看出初始的图像偏绿,这不是人们所想要的图像。
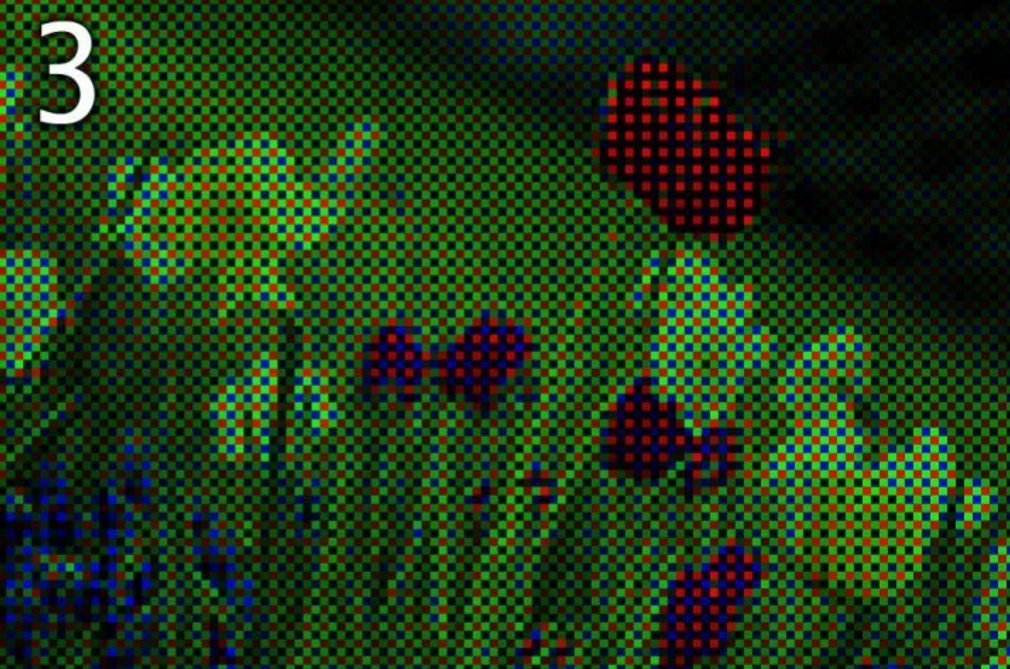
< 初始图像-图片来源于网络 >
接下来就是进行猜色,也就是根据一个像素点及其周围的红绿蓝各自的灰度值,经插值算出该像素点的RGB。插值算法很多,最简单就是将临近像素的色彩值赋给该像素,也可以将邻域的该颜色灰度值平均后赋给该像素点,算法很多(具体算法查阅拜耳滤镜插值)。
按照理想情况,每个像素点有3个值,而实际上,R和B各只有1/4,G有1/2,因此,bayer pattern得到的图像中,实际只有1/3的内容是真实的,其他都是根据先验知识插值得到。这也说明了自然图像中具有大量的冗余信息。
方案2:三种滤镜方案
这种成本相对较高,能够较大程度的保证色彩的还原度。
其原理是采用分光器或者棱镜,将通过镜头的光线被分为三束光,然后到达三个传感器,每个传感器件前有一个不同的滤光片,分别对应RGB三种颜色,以此来保证相机所采集到的色彩的精准度。
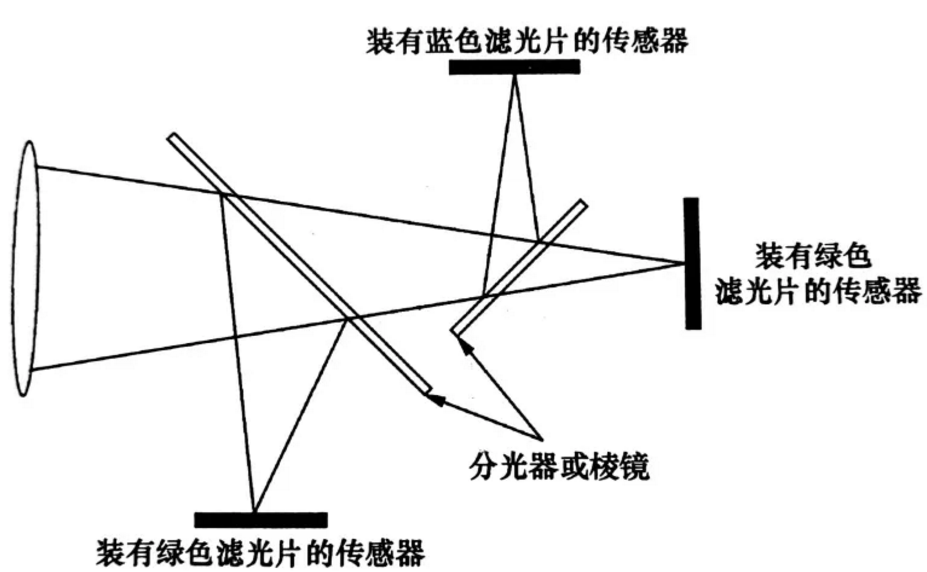
< 具体如图所示-图片来源于网络 >
审核编辑:黄飞
-
目前视频监控领域高清化的关键技术有哪些?难点是什么?2012-05-22 3711
-
汽车总线及其关键技术的研究2012-07-10 19620
-
CDMA原理与关键技术2012-08-16 3416
-
图像像素还原2012-09-12 3612
-
LED显示屏如何真实再现图像色彩2012-12-12 3211
-
实现电力线通信的关键技术是什么2019-05-30 1857
-
物联网的关键技术有哪些2020-06-16 3119
-
POE的关键技术有哪些?2021-06-10 3432
-
明白VPP关键技术有哪些2021-08-31 2299
-
LCD显示的关键技术2021-09-10 1637
-
视觉导航关键技术及应用2023-09-25 967
-
LED显示屏色彩还原技术2012-08-03 2043
-
基于色彩迁移的纹理图像色彩修正方法2017-12-20 1095
-
高分辨航拍相机实时图像存储系统的关键技术pdf下载2018-02-27 970
-
如何使用FPGA实现图像采集系统中色彩复原模块2021-04-01 1180
全部0条评论

快来发表一下你的评论吧 !
