

一种基于摩擦电传感器并集成量子棒增强功能的新型触觉感知系统
描述
目前,在类皮肤触觉感知系统研究领域,通过跨学科合作有效提升了系统的耐用性、灵敏度和生物相容性,这些进展为健康监测、机器人、人机交互等应用领域开辟了广阔的发展前景。然而,当前大多数已报道的触觉感知系统,仅在物理接触条件下才能产生信号,因此在其实际应用过程中,基于视觉图像、超声换能器或电磁技术的外部定位辅助仍然不可或缺。
有趣的是,自然界中的一种夜行性动物——鸭嘴兽,早在2500万年前就已经解决了这一问题。当在水中捕猎时,鸭嘴兽不依赖于眼睛、鼻子或耳朵,而是利用其“鸭嘴探测器”作为第六感,来感知猎物发出的细微机械运动和电场。研究人员从鸭嘴兽的第六感中汲取灵感,通过将位置检测与更多的感知功能融合在一套触觉感知系统中,将有望开发出能更精准模仿甚至超越人类皮肤感知能力的技术。
据麦姆斯咨询报道,近期,中国科学院北京纳米能源与系统研究所王中林院士团队以及德国慕尼黑工业大学Peter Müller-Buschbaum教授团队等研究人员,在鸭嘴兽第六感的启发下,成功开发出一种基于摩擦电传感器并集成量子棒(QRs)增强功能的新型触觉感知系统。该系统可作为单电极模式摩擦纳米发电机(TENG),用于位置检测与垂直力感测,具有高灵敏度和快速响应特性。此外,通过在聚二甲基硅氧烷(PDMS)薄膜中集成CdSe/CdS QRs,该系统可以通过改变发光层来感知不同的横向拉伸水平。在机器学习技术的支持下,该系统能够在微控制器单元平台上对18种不同物体实现高达98.5%的识别准确率,这为智能机器人的智能分拣应用开辟了一条便捷的路径。相关研究成果以“A multi-dimensional tactile perception system based on triboelectric sensors: towards intelligent sorting without seeing”为题发表在Nano Energy期刊上。
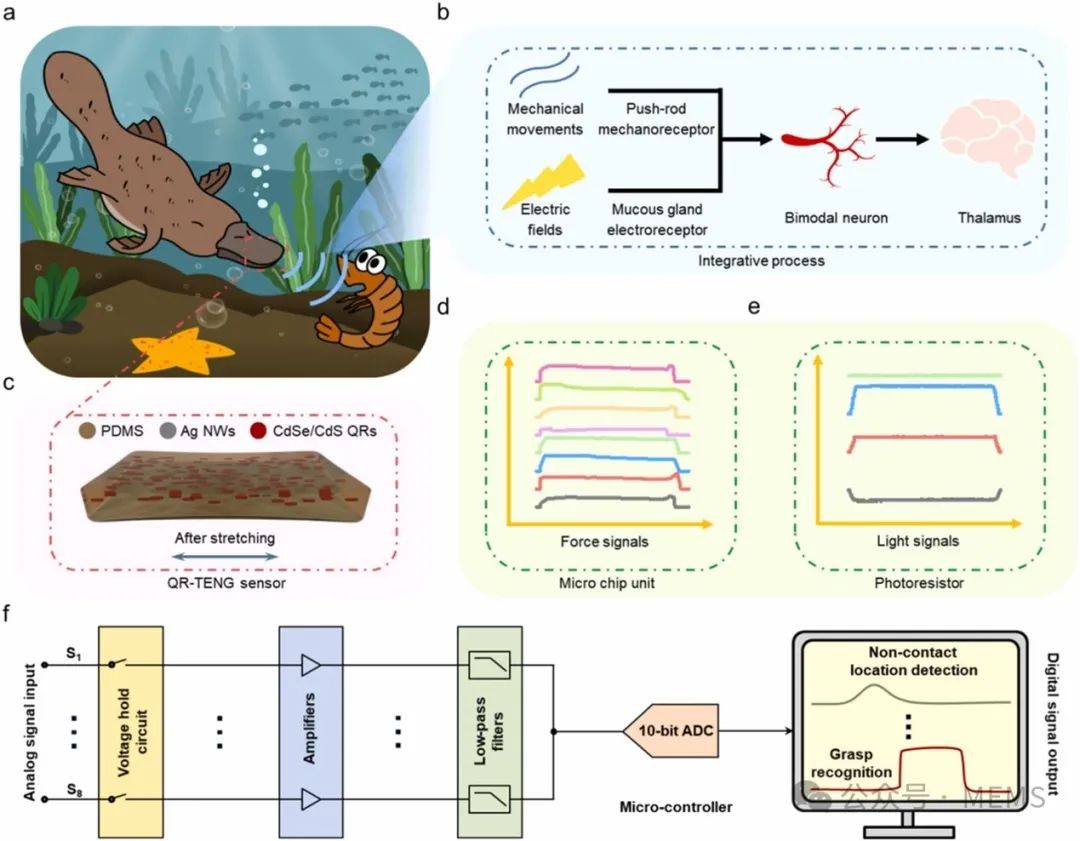
图1 具有量子棒(QRs)增强功能的摩擦电传感器
在这项研究工作中,研究人员开发了一种基于单电极模式TENG的摩擦电传感器,其特别之处在于增加了具有QRs功能的发光层。这种设计通过基于PDMS的TENG产生的电输出,实现了非接触式定位检测和自供能垂直力感测。通过添加功能性CdSe/CdS QRs,因其在紫外光和可见光照射下可被激发,能实现随条件变化的发光效果,可用于横向拉伸感测。通过在PDMS复合膜的表面采用波浪形结构,将力感测分辨率提高了28.0%。
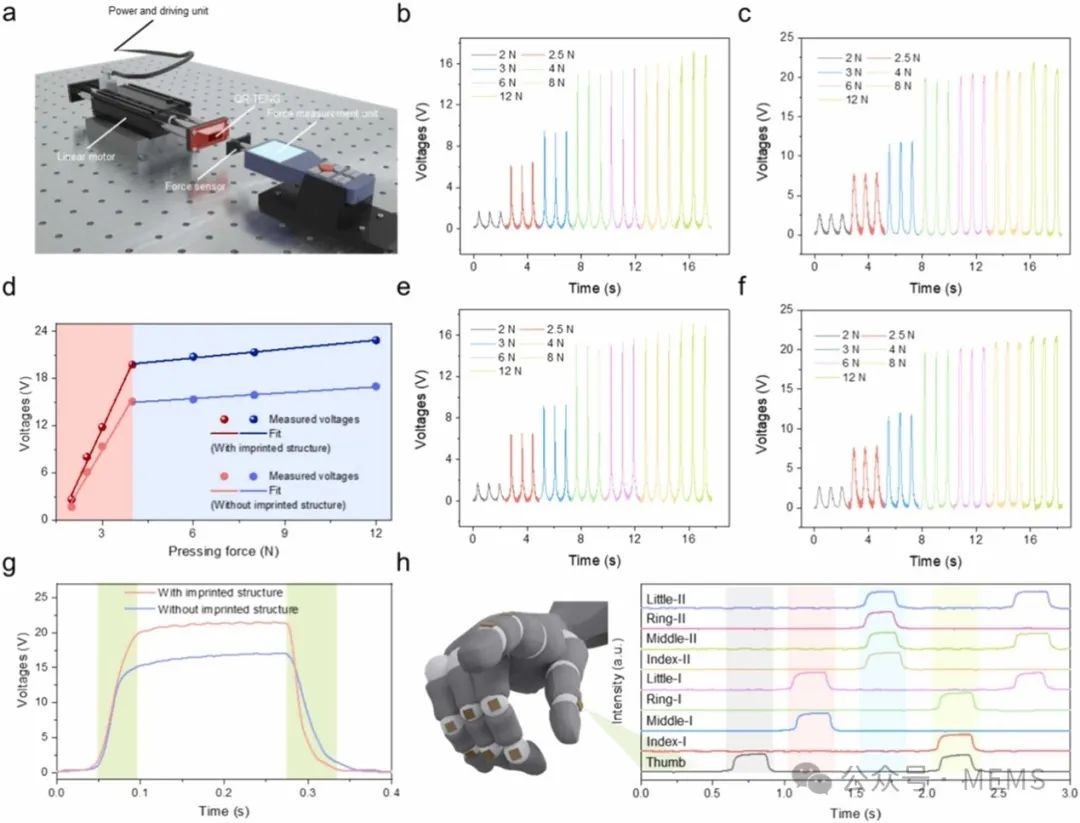
图2 基于TENG的垂直力传感器的表征
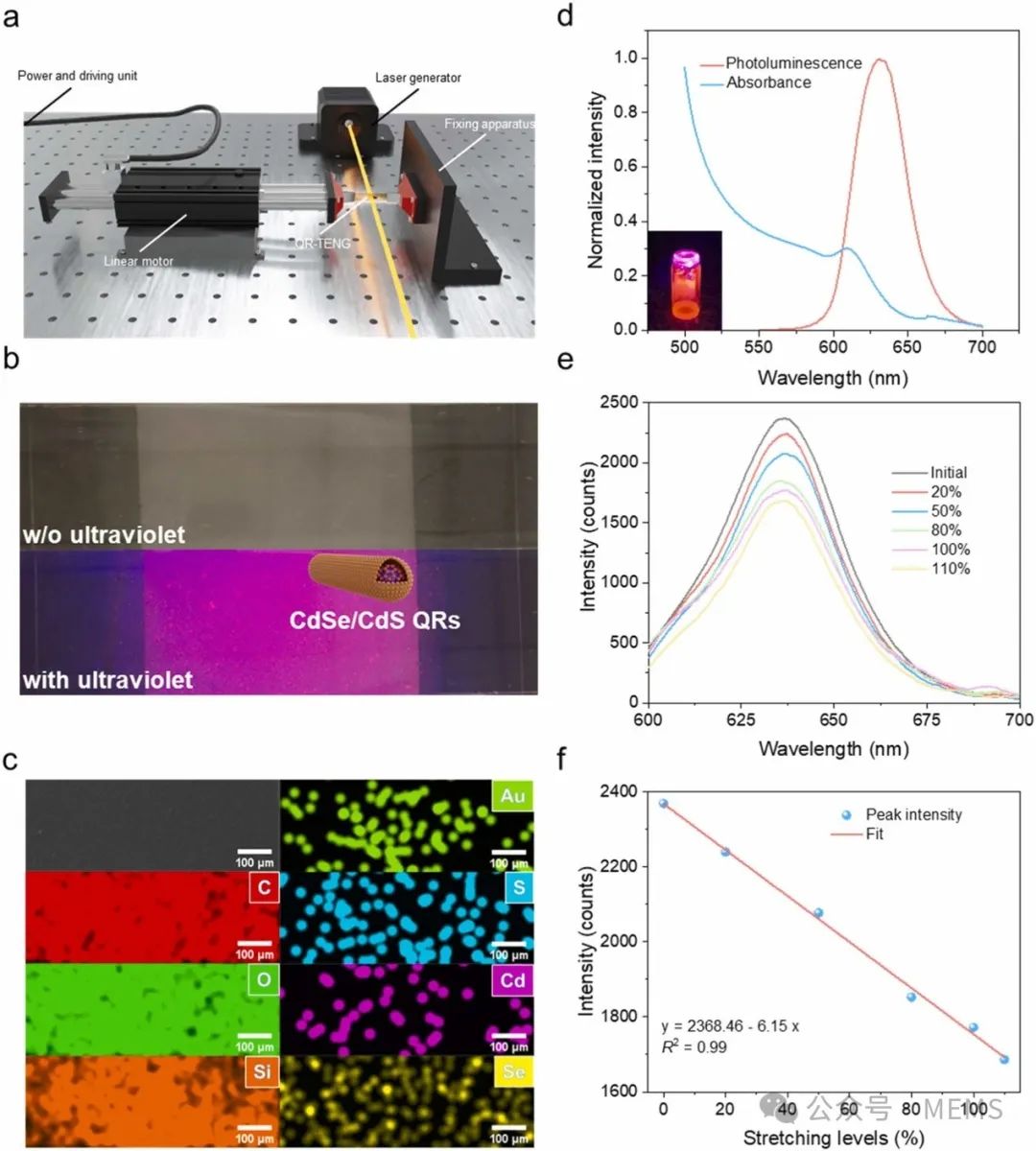
图3 基于QRs的横向拉伸传感器的表征
此外,研究人员展示了摩擦电传感器的鲁棒性和独立感测能力。通过集成软夹持器和计算机控制的机械臂,构建了一种基于8个摩擦电传感器的触觉感知系统,专门用于智能分拣。该触觉感知系统能够依靠力信号成功抓取并识别18种不同的物体,准确率达到96.3%,并且通过光信号的辅助,准确率可进一步提升至98.5%。进一步地,研究人员基于该触觉感知系统设计了一个“无需视觉”的智能分拣系统,无需任何外部定位装置即可实现位置检测。此外,得益于紫外光的潜在杀菌功能,该系统可满足智能家居和智能工厂应用中对智能化和节能分拣的需求。
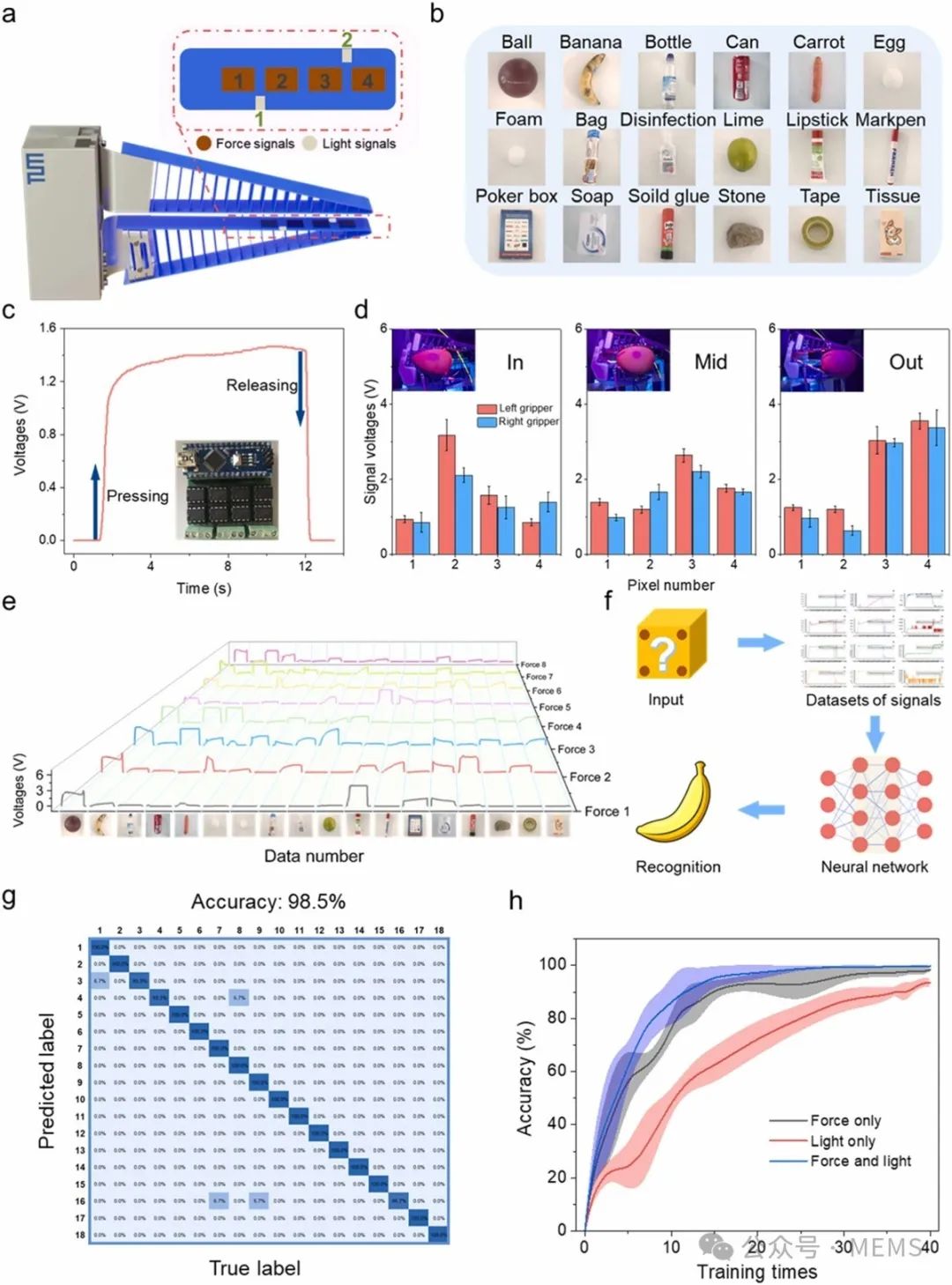
图4 通过触觉感知系统实现智能抓取
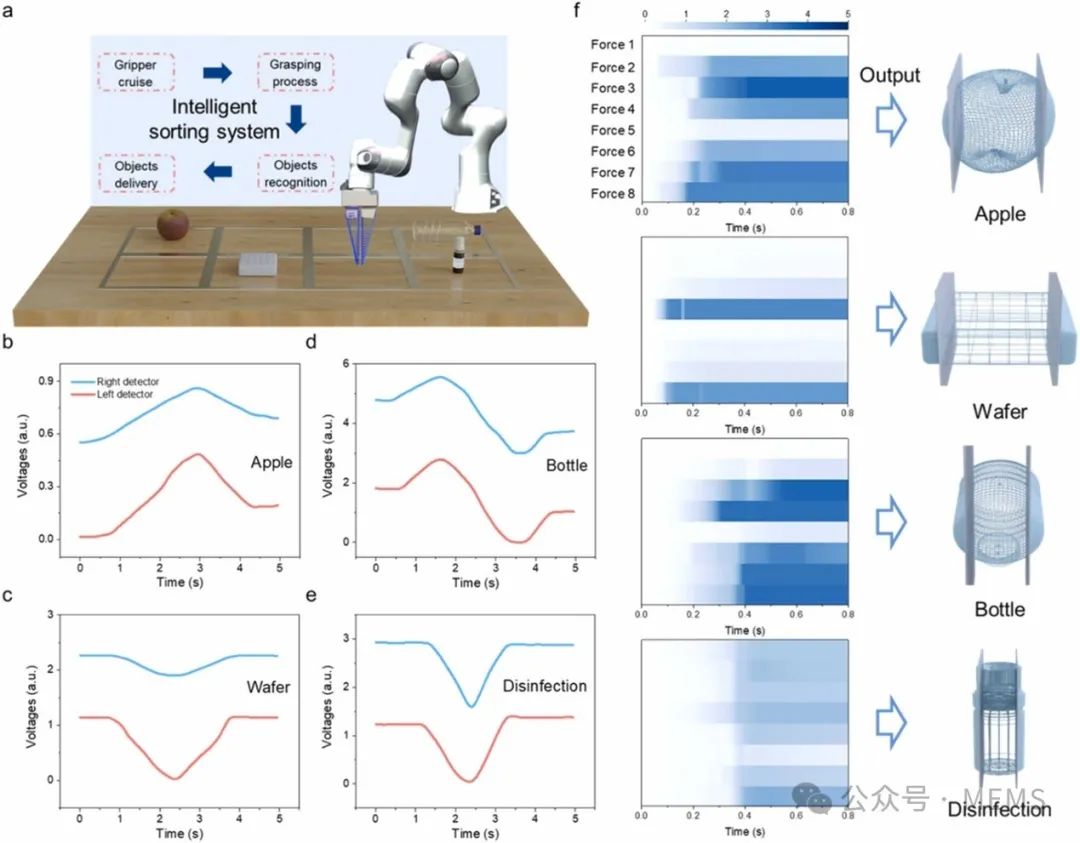
图5 “无需视觉”实时智能分拣
综上所述,这项研究工作利用机器学习技术,成功开发了一种基于摩擦电传感器的多维触觉感知系统。该系统融合了位置检测和智能抓取功能,可实现“无需视觉”智能分拣,用于物品检测、识别和搬运等任务。该多维触觉感知系统未来有望在智能家居和智能工厂等领域发挥巨大应用潜力。
审核编辑:刘清
-
广西大学:用于高温应用中的压力和温度传感的摩擦电触觉传感器2025-03-04 1389
-
一种模拟皮肤触觉的柔性仿生光纤触觉传感器2023-11-24 3555
-
广西大学:研发可穿戴摩擦电视觉传感器用于触觉感知2022-12-13 2276
-
盘点8项新型传感器技术,每一项都是风口!2021-09-07 2318
-
清华大学研制了一种多功能感知的触觉传感器 并成功应用于垃圾分类2020-12-23 5808
-
人工触觉的现在与未来2018-12-17 1645
-
盘点热门八大新型传感器技术2018-11-08 1969
-
传感器应用在触觉前沿图像系统设计2018-11-01 2212
-
一种柔性触觉传感阵列力觉标定2018-01-19 999
-
开发新型传感器的途径2017-09-25 2170
-
这些新型传感器你听过吗?2016-12-19 4824
-
一种新型光纤位移传感器的设计2012-08-14 3096
-
新型光电传感器的原理及应用2009-11-25 17302
全部0条评论

快来发表一下你的评论吧 !
