

爱普生推出高规格M-G370PDG扩展其一英寸平台imu产品线
描述
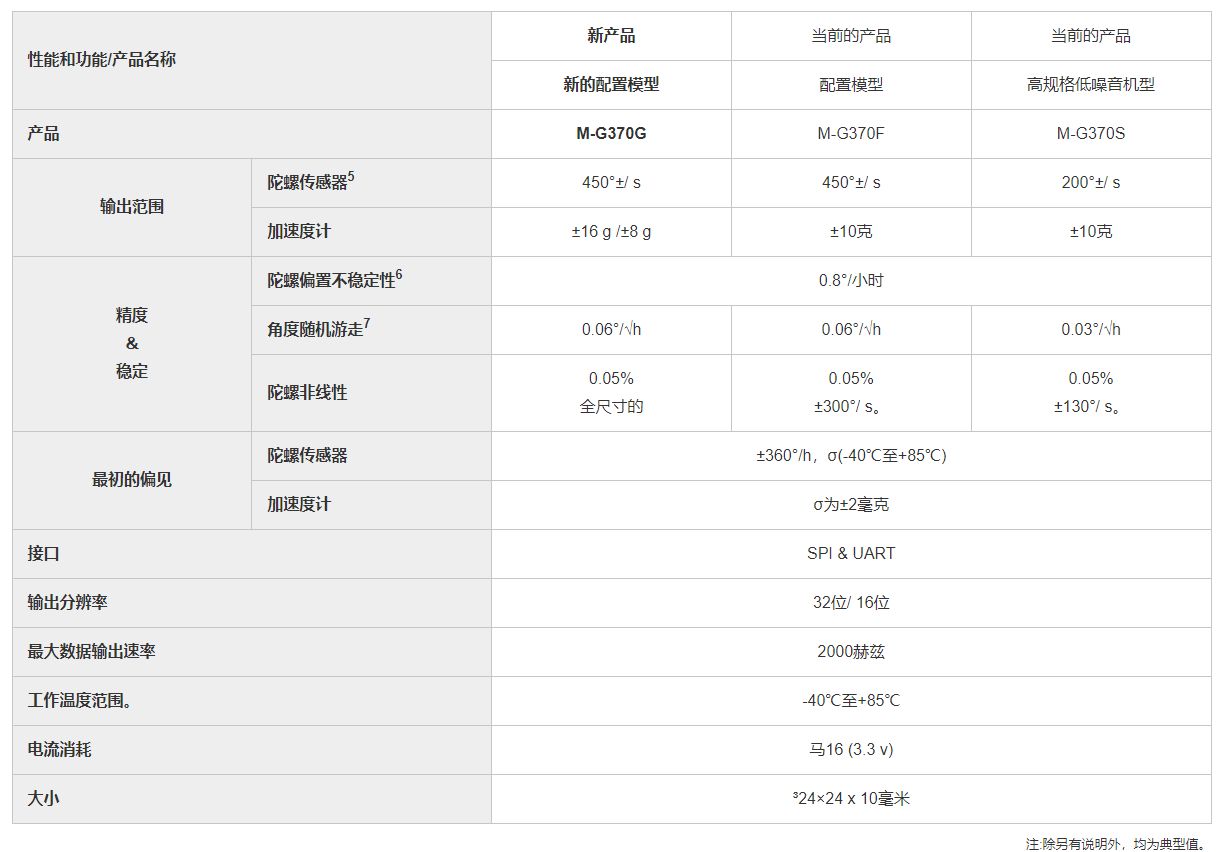
精工爱普生公司(TSE: 6724,“爱普生”)开发了M-G370PDG(“M-G370G”),扩展了其惯性测量单元1 (IMU)阵容,该IMU配备了高性能的六自由度传感器。M-G370G将于2023年7月投入量产。

爱普生的imu于2011年首次推出,已用于一系列客户应用,从精准农业(GNSS2)和工业无人机到相机和天线平台的振动控制和稳定,以卓越的性能和质量赢得了良好的声誉。爱普生拥有全系列的imu,从基本型号到高规格型号。所有这些都基于一个沿边约一英寸的平台,这是imu的标准外形因素。
与标准和基本型号一样,高规格M-G370G允许用户选择±8G或±16G的加速度计输出范围,并提供0.05%的非线性陀螺仪传感器的满量程。这些功能使新的IMU能够准确地测量从慢到快的所有类型的运动。
通过扩大和增强其小、轻、低功耗的一英寸平台产品阵容,爱普生为客户提供了更多的选择,使他们能够根据自己的需求和应用选择具有最佳功能和性能的产品。
爱普生计划于7月26日至28日在东京国际会展中心(Tokyo Big Sight)举行的“维护与弹性东京2023”(由日本生产力协会主办)上展出M-G370G。
鉴于正在进行的社会和技术变革,爱普生认为,对能够可视化信息的精密传感器的需求只会继续扩大。爱普生将继续利用我们高效、紧凑和精确的创新理念,提供小、轻、低功耗的传感系统,提供卓越的精度和稳定性,为客户的产品和服务做出重大贡献。
产品特性
- 1英寸平台(24 × 24 × 10mm3)向下兼容M-G330和M-G366、M-G370、M-G370S,大幅降低客户开发成本和评估时间
- 用户可选择加速度计输出范围在±8G或±16G
- 陀螺传感器非线性传感器的全尺寸范围为0.05%
- 低电流消耗:16ma
产品应用
- 相机、天线等的减振。
- 无人驾驶车辆(工业无人机、地面车辆、海上探测器等)
- 工业设备的振动、角度、轨迹测量等。
- 导航系统(GNSS、INS4、高精度定位器)等。
通用规范
- 1惯性测量单元(IMU)
IMU是一种用于感知惯性运动的装置。它由三轴角速率传感器和三轴加速度传感器组成。 - 2全球卫星导航系统(GNSS)
一种卫星系统,用于确定世界上任何地方的地理位置 - 3非线性
陀螺仪传感器或加速度计的输出相对于输入的近似直线的最大偏差。它通常以全比例尺的百分比表示。 - 4惯性导航系统(INS)
- 5陀螺仪传感器(角速率传感器)
测量单位时间内物体相对于参考轴的旋转角度(角速度)。 - 6偏见不稳定
Allan方差*中表示水平(零功率)特性的部分称为偏置不稳定性。它与1/f噪声相关,是传感器电位的重要指标之一。 - 7角度随机游走
Allan方差中斜率为-1/2的部分称为角度随机游走。由于存在与白噪声的相关性,因此增加平均时间会使平均时间的-1/2处的值降低。 - *阿伦方差
作为传感器性能的一个指标,Allan方差表示静态输出的稳定性。横轴表示数据的平均时间,纵轴表示平均值被平均时间分隔后的分布。已知Allan方差中出现的特征斜率为-1、-1/2、0、1/2和1次幂斜率,Allan方差与噪声密度相关,噪声密度为频率。Allan方差是用时间表示的指标。该值越小,稳定性越高,性能越好。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
爱普生开始交付两款新型IMUs:M-G370和M-G3652026-05-25 397
-
M-G366PDG IMU模组高精度惯性测量单元抗振性能优异2026-03-06 1290
-
爱普生M-G370PDT和M-G370PDG稳定云台的理想之选2025-04-11 1123
-
爱普生惯性测量单元M-G370PDF可广泛用于各工业领域2025-03-06 1038
-
爱普生M-G330PDG0惯性测量模块选型2024-09-20 1258
-
EPSON新品IMU传感器M-G570PR投产,功能更强大!2024-08-21 1655
-
爱普生通过低噪音高级型号扩展了其1英寸平台IMU产品线M-G370PDT2024-08-13 1339
-
爱普生开发用于姿态和振动控制的理想IMU2024-08-12 551
-
爱普生IMU系列新品——M-G366PDG和M-G330PDG2024-05-23 2655
-
EPSON惯性测量单元M-G370PDG解决严苛环境的应用2024-05-22 567
-
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制2024-03-21 2460
-
爱普生(EPSON)拓展其G系列IMU产品线,开发M-G366PDG和M-G330PDG2024-03-20 2495
-
爱普生为姿态和振动控制开发理想的IMU2024-02-28 1251
-
M-G370PDF1(IMU)2024-01-11 959
全部0条评论

快来发表一下你的评论吧 !
