

Nullmax提出多相机3D目标检测新方法QAF2D
描述
今天上午,计算机视觉领域顶会CVPR公布了最终的论文接收结果,Nullmax感知部门的3D目标检测研究《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》入选CVPR 2024,技术实力再获权威认可。
CVPR(IEEE Conference on Computer Vision and Pattern Recognition)是计算机视觉和模式识别领域的顶级会议,其收录的论文代表了计算机视觉领域的最新发展方向和最高研究水平。作为计算机视觉领域的世界三大顶会之一,CVPR在全球范围内有着极其广泛的影响力和严苛的录用标准。研究成果入选CVPR,也标志着Nullmax的创新成果和前沿技术持续获得国际顶级会议认可。
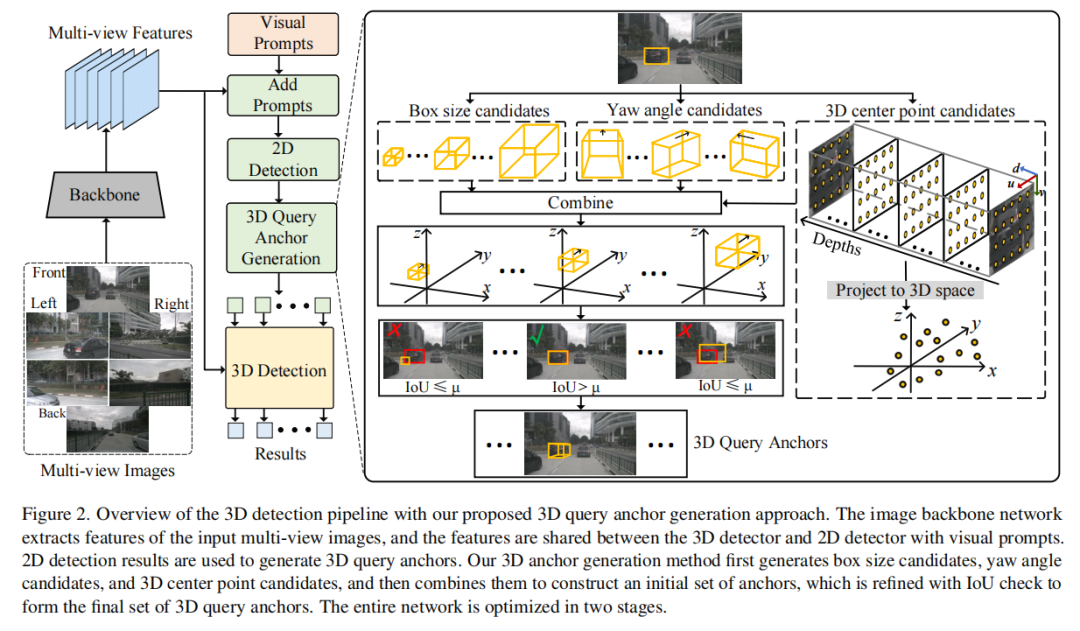
论文中,Nullmax提出了一种提升3D目标检测的新方法QAF2D(Query Anchor From 2D),通过2D检测结果指导生成3D查询锚点(Query Anchor),显著提升了多相机3D目标检测的性能。同时,Nullmax利用视觉提示(Visual Prompt)设计了一套两阶段的优化方法,让2D和3D检测器共用图像特征提取网络,在不影响3D检测器性能的情况下,降低模型训练和部署的资源消耗。
在nuScenes数据集上,Nullmax将QAF2D集成到了三种常见的基于查询的3D目标检测器中。实验结果显示,QAF2D 方法在 nuScenes 数据集上取得了显著的性能提升,平均提升 1.18% NDS 和 1.74% mAP,最大提升为 2.3% NDS 和 2.7% mAP。
在自动驾驶当中,3D目标检测是障碍物检测等任务的关键技术。更好的3D目标检测性能,可以提升自动驾驶系统的整体表现,尤其是增强系统驾驶的安全性。将QAF2D应用到实际的量产车型上,将可以进一步提升智能驾驶的整体表现,同时降低部署和开发时的硬件资源需求。
作为一家领先的自动驾驶技术企业,Nullmax拥有强大的技术团队和一流的研发实力,未来Nullmax将继续探索3D目标检测的最新技术,不断提升感知系统的性能和鲁棒性,将研究成果应用于实际场景,为自动驾驶技术的落地贡献力量。
审核编辑:刘清
-
无刷直流电机反电势过零检测新方法2025-06-26 707
-
友思特C系列3D相机:实时3D点云图像虹科光电 2024-01-10
-
机场场面监视雷达目标检测新方法2017-01-07 903
-
开发以3D打印随选制药的新方法2018-02-07 1078
-
全球领先的沉浸式3D媒体技术公司Matterport发布了新款3D相机2018-03-13 11349
-
3D传感器:机器人安全的新方法和新应用2019-04-19 4873
-
IMEC提出扇形晶圆级封装的新方法2019-08-16 5366
-
科学家正在研发3D打印人造器官的新方法2020-05-09 3218
-
3D相机选型指南2022-03-21 6852
-
基于Transformer的相机-毫米波雷达融合3D目标检测方法2023-07-10 4469
-
如何利用车载环视相机采集到的图像实现精准的3D目标检测2023-07-26 1421
-
CCV 2023 | SparseBEV:高性能、全稀疏的纯视觉3D目标检测器2023-09-19 2506
-
如何搞定自动驾驶3D目标检测!2024-01-05 1347
-
介绍一种使用2D材料进行3D集成的新方法2024-01-13 2584
-
Adobe提出DMV3D:3D生成只需30秒!让文本、图像都动起来的新方法!2024-01-30 2728
全部0条评论

快来发表一下你的评论吧 !
