

用于机器人触觉和非接触距离感知的柔性双模态传感器设计
描述
具有非接触式传感功能的柔性传感器的开发仍然是触觉感知的技术挑战。对于传统的非接触式传感,通常使用视觉识别和声学反射检测。视觉识别检测更适合长距离检测,长距离检测受分辨率限制,通常会被短距离内的其他事物遮挡。声反射检测既可以用于短距离检测,也可以用于长距离检测,但发射超声波相对较高的功耗将极大地限制其应用场景。此外,传统的非接触式传感方法通常难以应用于柔性传感器中。
近期,浙江大学机械306实验室陈志坚硕士提出了一种新型的柔性双模态传感器,该传感器具有高灵敏度的接触式压力传感和精确的非接触式距离检测功能,用于智能机器人感知。相关研究成果总结成论文“Highly sensitive and flexible dual-mode sensor with contact and contactless sensing abilities for robotic perception”,发表在国际期刊 Journal of Intelligent Manufacturing 上。论文研究工作得到了国家自然科学基金、东海实验室科学基金、中央高校基础研究基金等项目的资助。
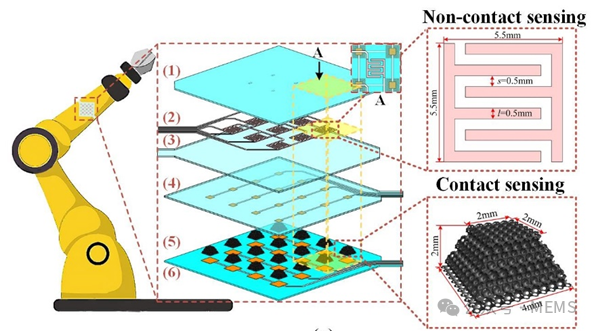
图1 柔性双模传感器的结构示意图
本文所提出的传感器结构如图1所示。柔性传感器上层为3×3的基于电场检测原理的平面叉指电极阵列,用于测量非接触距离信息。下层为4×4的截锥形压力传感单元,用于测量外部接触压力。两种感知单元都通过级联组件和不同的检测单元嵌套布置进行封装,目的是减少不同信号之间的干扰。传感器的工作原理和制造流程如图2和图3所示。
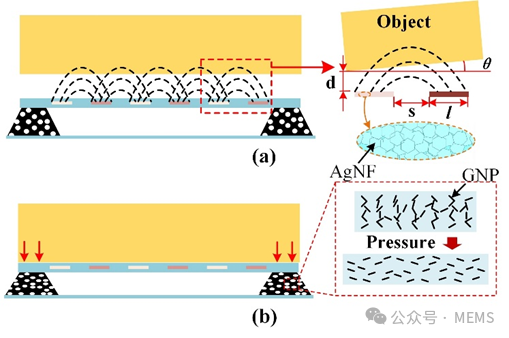
图2 传感器的工作原理
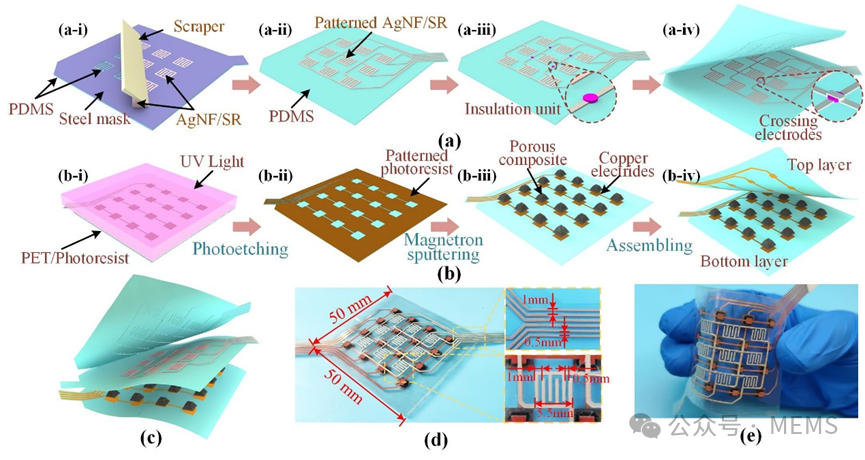
图3 传感器制造流程
制备的柔性双模态传感器具有0.33V/N的压力检测高灵敏度以及5.5N的压力检测范围,4cm内对绝缘物体和导电物体均具有高灵敏距离检测能力,此外传感器还具有良好的信号稳定性和可重复性,传感器的具体信号测试结果分别如图4和图5所示。
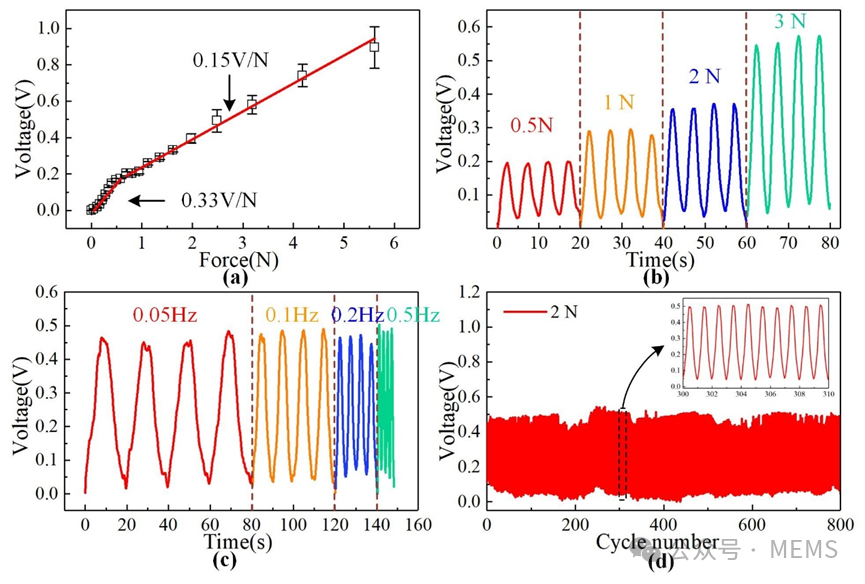
图4 传感器压力感知性能测试结果
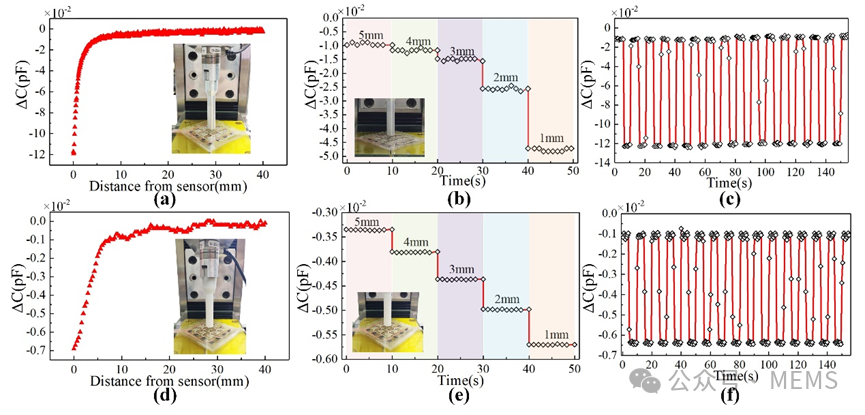
图5 传感器接近觉感知性能测试结果
随后将双模态传感器安装在机械臂上,进行物体的抓取和碰撞检测实验,如图6和图7的结果表明,该传感器可以准确测量物体之间的分布接触力和距离,实现全过程的触觉感知,所提出的传感器在机器人操纵和安全工作应用中具有巨大的潜力。
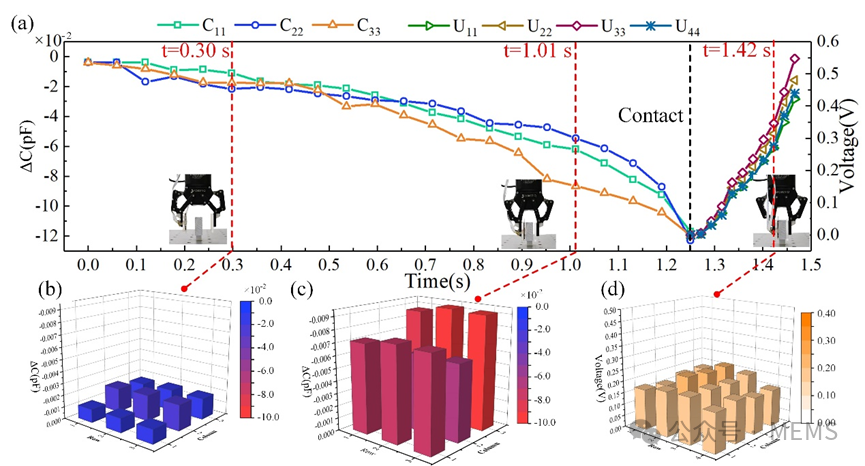
图6 机器人手完全抓取物体过程中的输出信号
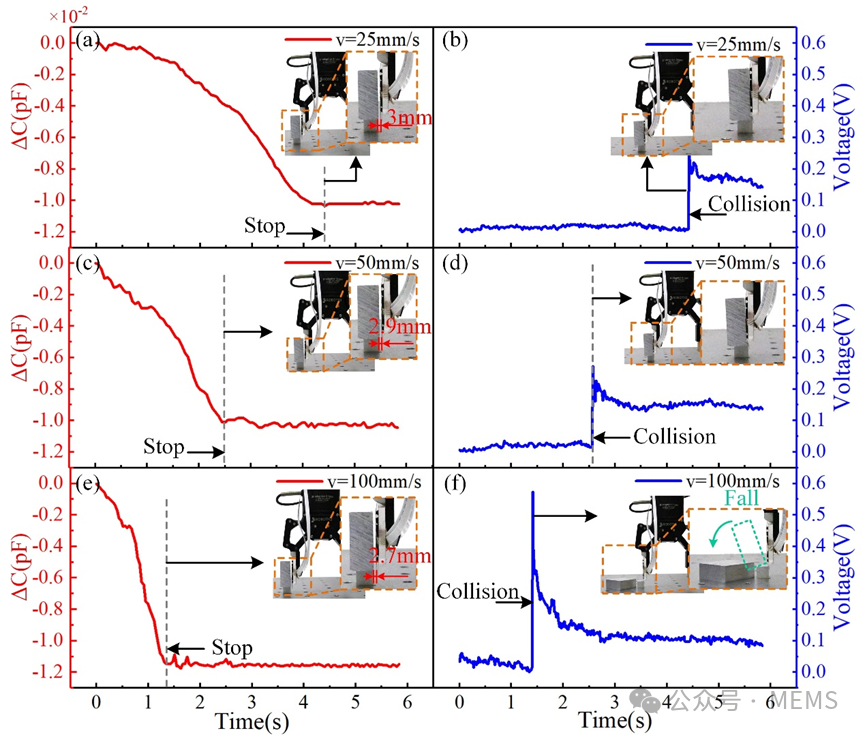
图7 机器人手臂碰撞测试实验
审核编辑:刘清
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 921
-
广州团队研制出机器人“触觉皮肤”2026-03-11 4209
-
机器人竞技幕后:磁传感器芯片激活 “精准感知力”2025-08-26 940
-
工业机器人的触觉传感器有哪些?传感器作用是什么?2024-03-11 2839
-
柔性触觉传感器或将在人形机器人时代大放异彩2023-12-13 2068
-
基于柔性机械手的触觉传感器技术研究2023-10-24 2074
-
机器人传感器:本体感知传感器和外部感知传感器2022-12-07 4196
-
距离传感器有什么用2019-08-21 3319
-
机器人传感器的类别和应用原理2018-11-08 2993
-
机器人传感器2018-01-03 3832
-
智能机器人对于传感器的需求2015-01-20 6829
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4263
全部0条评论

快来发表一下你的评论吧 !
