

爱普生为姿态和振动控制开发理想的IMU
描述
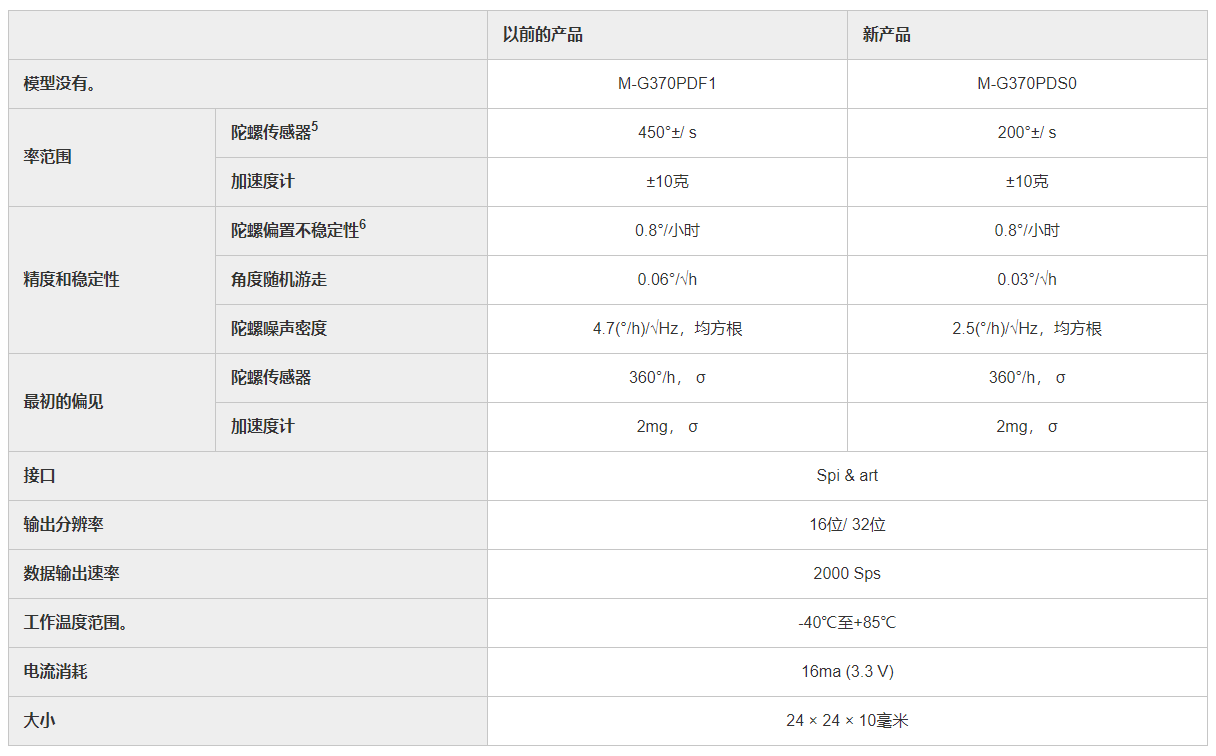
- M-G370PDS0改善了短期噪声,扩展了型号阵容,使产品选择范围更广-

精工爱普生公司(“爱普生”,TSE: 6724)已经开发出M-G370PDS0样品,这是一种配备高性能六轴传感器的新型惯性测量单元(IMU)1。新产品计划于2022年春季批量生产。
爱普生的imu于2011年首次推出,已在一系列客户应用中使用,以出色的性能和质量赢得了良好的声誉。近年来,IMU的应用已经扩展到无人系统的测量、空中和水下视频摄影等领域,从而产生了对更精确的位置和姿态控制的日益增长的需求。因此,对精度更高的imu的需求正在上升,这对姿态控制至关重要,尤其是噪音性能。M-G370PDS0的角度随机游走2(输出的短期变化)为0.03°/√h,是其前身的一半,并且可以更准确地检测到设备和系统姿态的非常微小的变化,因为它们不会丢失在传感器噪声中。这款IMU体积小、重量轻、功耗低,可以帮助客户将自己的产品做得更小、更轻。新的IMU保持与早期产品(M-G370/365/364/354)的兼容性,使性能升级容易。
产品特性
- 配备低噪声、高性能传感器,保持了Epson之前imu 0.03°/√h角度随机游走的高稳定性噪声密度:2.5(°/h)/√Hz
- 卓越的动态性能(比例因子非线性),高精度测量,从静态到高速运动
- 保持与早期imu (M-G370/365/364/354)的兼容性,大幅降低客户开发成本和评估时间
- 低电流消耗:16ma
产品应用
- 无人驾驶车辆(工业无人机、地面车辆、海上探测器等)
- 相机、天线等的减振。
- 工业设备的振动、角度、轨迹测量等。
- 导航系统(GNSS3、INS4、高精度定位器)等。
- 产品规格
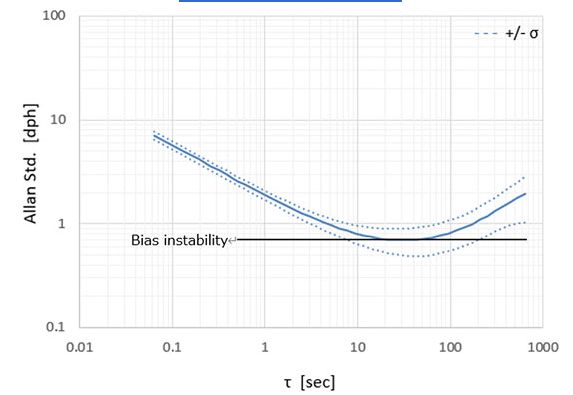
Allan方差是传感器性能的一个指标,Allan方差表示静态输出的稳定性。横轴表示数据的平均时间,纵轴表示平均值被平均时间分隔后的分布。已知Allan方差中出现的特征斜率为-1、-1/2、0、1/2和1次幂斜率,Allan方差与噪声密度相关,噪声密度为频率。Allan方差是用时间表示的指标。该值越小,稳定性越高,性能越好。
1惯性测量单元IMU (Inertial measurement unit)是一种用于检测惯性运动的装置。它由三轴角速率传感器和三轴加速度传感器组成。斜率为-1/2的Allan方差部分称为角度随机漫步。由于存在与白噪声的相关性,因此增加平均时间会使平均时间的-1/2处的值降低。3全球导航卫星系统(GNSS)用于确定世界上任何地方的地理位置的卫星系统4惯性导航系统(INS) 5陀螺仪传感器(角速率传感器)测量单位时间内物体相对于参考轴的旋转角度(角速率)。Allan方差中表示水平(零功率)特性的部分称为偏置不稳定性。它与1/f噪声相关,是传感器电位的重要指标之一。
M-G370S陀螺仪艾伦方差(型号)
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 856
-
ADIS16300四自由度IMU在姿态测量中的应用2010-07-21 839
-
爱普生出席世强峰会 IMU产品助力智能工业及制造2019-05-30 728
-
姿态传感器和IMU的联系和区别2022-02-15 4173
-
爱普生推出高规格M-G370PDG扩展其一英寸平台imu产品线2024-02-27 1845
-
爱普生开发新的三轴振动传感器用于大坝和河流闸门设备监测2024-02-28 1214
-
爱普生(EPSON)拓展其G系列IMU产品线,开发M-G366PDG和M-G330PDG2024-03-20 2568
-
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制2024-03-21 2534
-
日本宇宙航空研究开发“Int-Ball2”自由飞行相机机器人采用的Epson IMU2024-04-28 791
-
爱普生的惯性测量单元(IMU)M-G370PDT成为无人驾驶的理想选择2024-05-22 910
-
爱普生IMU系列新品——M-G366PDG和M-G330PDG2024-05-23 2754
-
爱普生开发用于姿态和振动控制的理想IMU2024-08-12 576
-
从姿态到飞行控制,IMU全方位守护无人机飞行2024-12-13 1503
-
爱普生M-G366PDG惯性测量单元IMU成为动中通天线系统的理想选择2025-04-01 1369
-
IMU的精度对无人机姿态控制意味着什么?2025-07-25 1261
全部0条评论

快来发表一下你的评论吧 !
