

随机通信下多智能体系统的干扰攻击影响研究
安全设备/系统
描述
(《指挥与控制学报》刊文精选)
引用格式:吴小太, 余金其, 唐漾, 张振华. 干扰攻击下基于随机通信的多智能体系统一致性分析[J]. 指挥与控制学报, 2023, 9(6): 726-733.
WU Xiaotai, YU Jinqi, TANG Yang, ZHANG Zhenhua. Concensus Analysis of Multi-agent Systems Based on Random Communication under Jamming Attack[J]. Journal of Command and Control, 2023, 9(6): 726-733.
摘要
实际应用中,多智能体系统可能在一定时间段内受到恶意攻击者持续或间歇性的攻击,导致智能体间的通信信道被阻断。针对这一现象,假定智能体间的通信发生时间具有随机性,即通信时间间隔由确定性准备时间与随机通信时间段共同组成,以降低信息在通信过程中被恶意攻击的风险。通过采用三元控制方法和随机分析技巧,得到了干扰攻击下多智能体系统一致的充分条件。通过实例数值仿真验证了所得结果的有效性。
随着未来战争向信息化与网络化对抗方向迅猛发展,以多智能体系统协同控制为代表的群体智能技术正在向军事领域全面渗透[1],并在无人机蜂群战术[2]、多导弹协同作战[3]、协同侦察系统等方向得到广泛应用。具体地,集群系统通过网络和通信技术来实现智能体与其邻居节点之间的信息传递与协同工作[4,5], 进而完成复杂的军事任务。
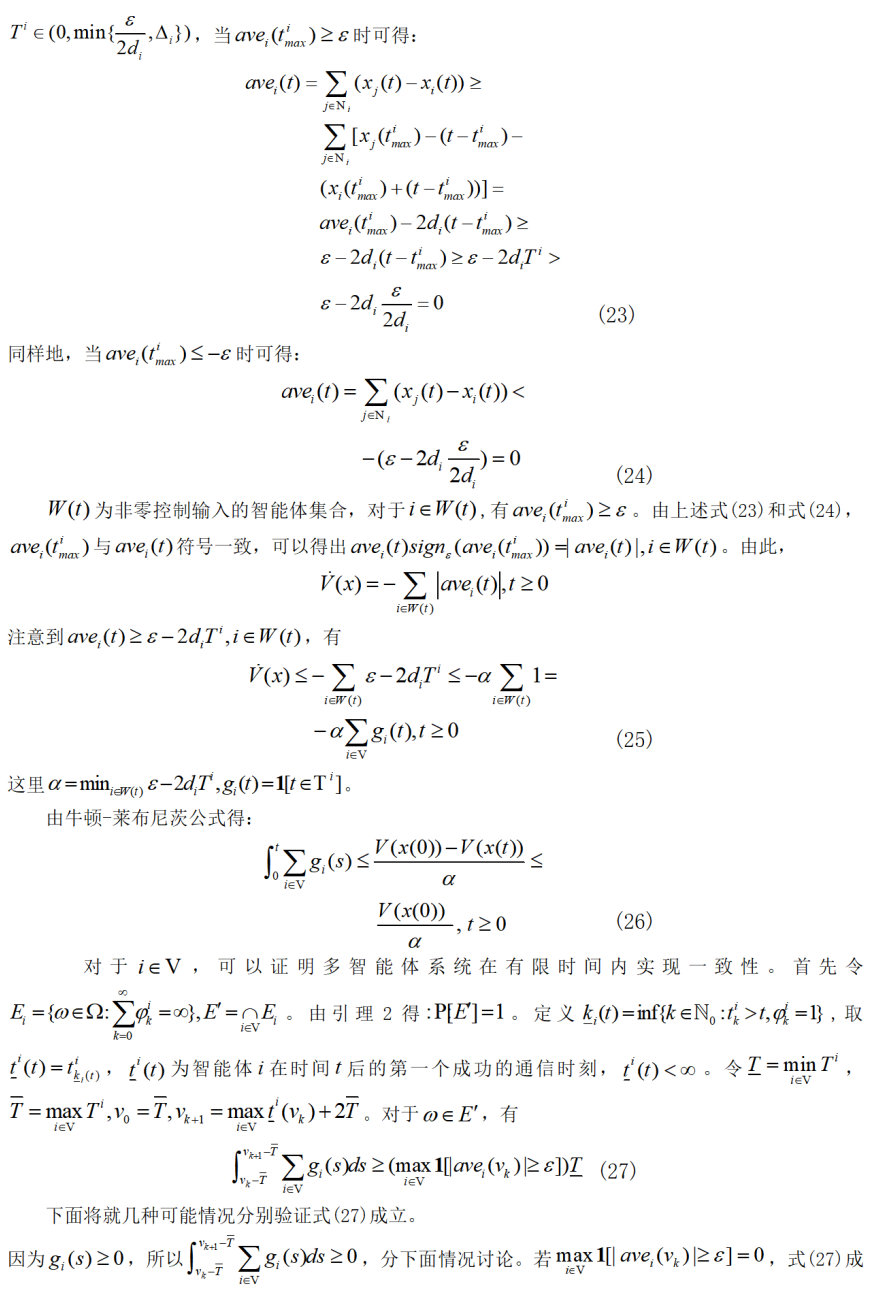
在网络技术应用于集群智能的同时,系统的指挥与控制模块及信息传输途径还面临着来自于外界的恶意攻击风险[6]。当系统遭受网络攻击时,合法操作员可能无法指挥与控制目标系统,导致控制命令传输失败,使得多智能体系统的一致性无法得到保证、集群战术目标无法完成。因而,确保被控系统的网络通信安全已经成为一项重要挑战。
网络控制系统可能会受到不同类型的网络攻击威胁[10-12],主要包括拒绝服务(denial of service, DoS)攻击[7]、欺骗攻击[8]、干扰攻击[9]等。文献[10]研究了一类对抗性攻击下网络物理系统的安全评估与控制问题,且控制信号在被发送到执行器的过程中可被攻击者恶意篡改。文献[11]指出,攻击者可以在不被系统监测到的情况下将特定的虚假数据注入系统。由文献[12]可知,自身能量有限的攻击者还可以利用DoS攻击来阻断通信网络的信息传输。因此,研究网络攻击背景下多智能体系统的协同控制特别是一致性问题具有重要意义。
近年来,在假设网络攻击服从伯努利(Bernolli)分布[13-14]或马尔可夫链(Markov Chain)[15]等随机分布的基础上,针对随机网络攻击下多智能体系统一致性问题的研究已经取得丰硕成果。文献[13]主要研究了DoS攻击导致的网络丢包现象对系统控制性能的影响,设计了最大化平均期望估计误差的最优攻击调度方案,以及最大化丢包网络上的期望终端估计误差的最优攻击调度方案。文献[14]设计了一类智能攻击者,通过随机向网络中的某些通信信道注入DoS攻击使得相应的被攻击通信链路断开,最终破坏目标系统的一致性状态。文献[15]则考虑了马尔可夫调制DoS攻击下的风险敏感随机控制问题,其中攻击者使用隐马尔可夫模型随机阻塞系统中的控制数据包。
然而,上述文献通常从攻击者角度研究如何设计攻击手段以提高其攻击效率,而从被攻击者角度研究系统在被攻击时如何正常运行的文献则相对较少。当系统面临可能的外部攻击时,设计一种有效且易于实现的控制机制使得被攻击系统仍能维持正常工作具有重要价值。对此,文献[16]提出了一类与触发机制相结合的随机通信协议以降低干扰攻击对多智能体系统一致性的不利影响。
基于通过智能体之间随机通信或采样来生成三种控制信号的三元控制方法[17],分别研究了攻击者干扰攻击发生和持续时间与随机通信时间无关和相关两种情形下的多智能体系统的一致性问题。该文提出的随机通信协议可以在概率意义上确保系统在有限时间内实现有界一致性。然而,文献[16]仅假定随机通信序列服从均匀分布,这可能导致相邻通信间隔过于接近甚至重合的不合理现象,从而限制了相关研究结果的实际应用范围。
本文将考虑干扰攻击下一类基于随机通信协议的多智能体系统一致性问题。通过三元控制方法和随机分析技巧,获得了干扰攻击下基于随机通信的多智能体系统实现一致性需满足的充分条件。不同于文献[16],假定智能体间的通信发生时间具有随机性,即通信时间间隔由确定性的准备时间与随机时间间隔共同组成,从而进一步降低信息在通信过程中被恶意攻击的风险。
值得指出的是,本文引入的确定性与随机时间共同组成的混合时间间隔可以有效避免文献[16]中通信发生时间间隔过小,甚至重合的不足,有效拓广了文献[16]中相关结论的适用范围。相比于文献[17-18]等采用的确定性通信策略,本文设置的通信机制使得采样时刻具有随机性,可在一定程度上避免攻击者对被控系统具体采样规律的侦测和预判。另一方面,相比于受控系统的状态轨迹在时间无穷大尺度上的渐近或指数收敛[19],本文基于三元控制方法可以确保多智能体系统在有限时间内实现一致性。

References
[1] 田磊, 王晓东, 董希旺, 等. 基于时变编队控制的有人-无人集群协同飞行策略 [J]. 指挥与控制学报, 2022, 8(1): 57-63.
TIAN L, WANG X D, DONG X W, et al. Cooperative flight strategy for manned and unmanned swarm systems based on time-varying formation control[J]. Journal of Command and Control, 2022, 8(1): 57-63.
[2] 温广辉, 周佳玲, 吕跃祖, 等. 多导弹协同作战中的分布式协调控制问题[J]. 指挥与控制学报, 2021, 7(2):137-145.
WEN G H, ZHOU J L, LYU Y Z, et al. Distributed coordinated control in multi-missile cooperative tasks[J]. Journal of Command and Control,2021, 7(2): 137-145.
[3] 谷海波, 刘克新, 吕金虎. 集群系统协同控制:机遇与挑战 [J]. 指挥与控制学报, 2021, 7(1): 1-10.
GU H B, LIU K X, LYU J H. Cooperative control of swarm systems: opportunities and challenges[J]. Journal of Command and Control, 2021, 7(01): 1-10.
[4] SABER R O, FAX J A, MURRAY R M. Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE, 2007, 95(1): 215-233.
[5] REN W. Distributed cooperative attitude synchronization and tracking for multiple rigid bodies[J]. IEEE Transactions on Control System Technology, 2010, 18(2): 383-392.
[6] FENG Z, WEN G, HU G. Distributed secure coordinated control for multiagent systems under strategic attacks[J]. IEEE Transactions on Cybernetics, 2017, 47(5): 1273-1284.
[7] FENG S, TESI P. Resilient control under Denial-of-Service: Robust design[J]. Automatica, 2017, 79:42-51.
[8] 王誉达, 查利娟, 刘金良, 等. 基于事件触发和欺骗攻击的多智能体一致性控制 [J]. 南京信息工程大学学报(自然科学版), 2019, 11(4):380-389.
WANG Y D, ZHA L J, LIU J L, et al. Event-based consensus of multi-agent systems with deception attacks[J]. Journal of Nanjing University of Information Science and Technology(Natural Science Edition), 2019, 11(4):380-389.
[9] SENEJOHNNY D, TESI P, PERSIS C D. A jamming-resilient algorithm for self-triggered network coordination[J]. IEEE Transactions on Control of Network Systems, 2018, 5(3): 981-990.
[10] HAMZA F, PAULO T, SUHAS N, DIGGAVI. Secure estimation and control for cyber-physical systems under adversarial attacks[J]. IEEE Transactions on Automatic Control, 2014, 59(6):1454-1467.
[11] ZUO Z, CAO X, WANG Y, ZhANG W. Resilient consensus of multiagent systems against Denial-of-Service attacks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(4): 2664-2675.
[12] AWERBUCH B, CURTMOLA R, HOLMER D, et al. ODSBR: An on-demand secure byzantine resilient routing protocol for wireless Ad Hoc networks[J]. ACM Transaction on Information and System Security, 2007, 10(4):161-195.
[13] QIN J H, Li M L, SHI L, Yu X H. Optimal Denial-of-Service attack scheduling with energy constraint over packet-dropping networks[J]. IEEE Transactions on Automatic Control, 2018,63(6):1648-1663.
[14] SUN L, ZHANG Y , SUN C. Stochastic Denial-of-Service attack allocation in leader-following multiagent systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(5):2848-2857.
[15] BEFEKADU G K, GUPTA V, ANTSAKLIS P J. Risk-sensitive control under Markov modulated Denial-of-Service (DoS) attack strategies[J]. IEEE Transactions on Automatic Control, 2015, 60(12):3299-3304.
[16] AHMET C, KAITO K, TOMOHISA H, HIDEAKI I. Randomized transmission protocols for protection against jamming attacks in multi-agent consensus[J]. Automatica, 2020, 117:108960.
[17] PERSIS C D, FRASCA P. Robust self-triggered coordination with ternary controllers[J]. IEEE Transactions on Automatic Control, 2013, 58(12):3024-3038.
[18] SENEJOHNNY D, PERSIS C D, TESI P. A jamming-resilient algorithm for self-triggered network coordination[J]. IEEE Transactions on control of network systems, 2018, 5(3): 981-990.
[19] ZHANG H, FENG G, YAN H. Consensus of multi-agent systems with linear dynamics using
Event-triggered control[J]. IET Control Theory & Applications, 2014, 8(18): 2275-2281.
[20] 王利, 王普, 闫峥. 无人机通信网络安全综述[J]. 网络空间安全, 2019, 10(9): 13-19.
WANG L, WANG P, YAN Z. A survey on secure communication of unmanned aerial vehicles[J]. Cyberspace Security, 2019, 10(9): 13-19.
作者简介
吴小太 (1982—) , 男, 博士, 教授, 主要研究方向为随机混杂系统的稳定性分析、稳定化控制和多智能体网络应用. 本文通信作者.
余金其 (1998—) , 男, 硕士研究生, 主要研究方向为多智能体系统的应用.
唐 漾 (1982—) , 男, 博士, 教授, 主要研究方向为自主群体智能系统感知、控制和决策、机器视觉和深度学习.
张振华 (1991—) , 男, 博士, 讲师, 主要研究方向为多智能体系统和脉冲一致性.
审核编辑:黄飞
-
[14.1.1]--电力信息物理系统下的网络攻击研究jf_60701476 2022-11-24
-
介绍多智能体系统的解决方案以及应用2021-07-12 1630
-
基于MATLAB/Simulink的扩频通信系统仿真及抗干扰研究2021-06-01 1528
-
详谈射频干扰攻击原理和实现过程2020-07-30 2165
-
如何利用射频前端电路研究和设计智能天线?2019-07-31 2249
-
多智能体系统的特点2019-01-10 15926
-
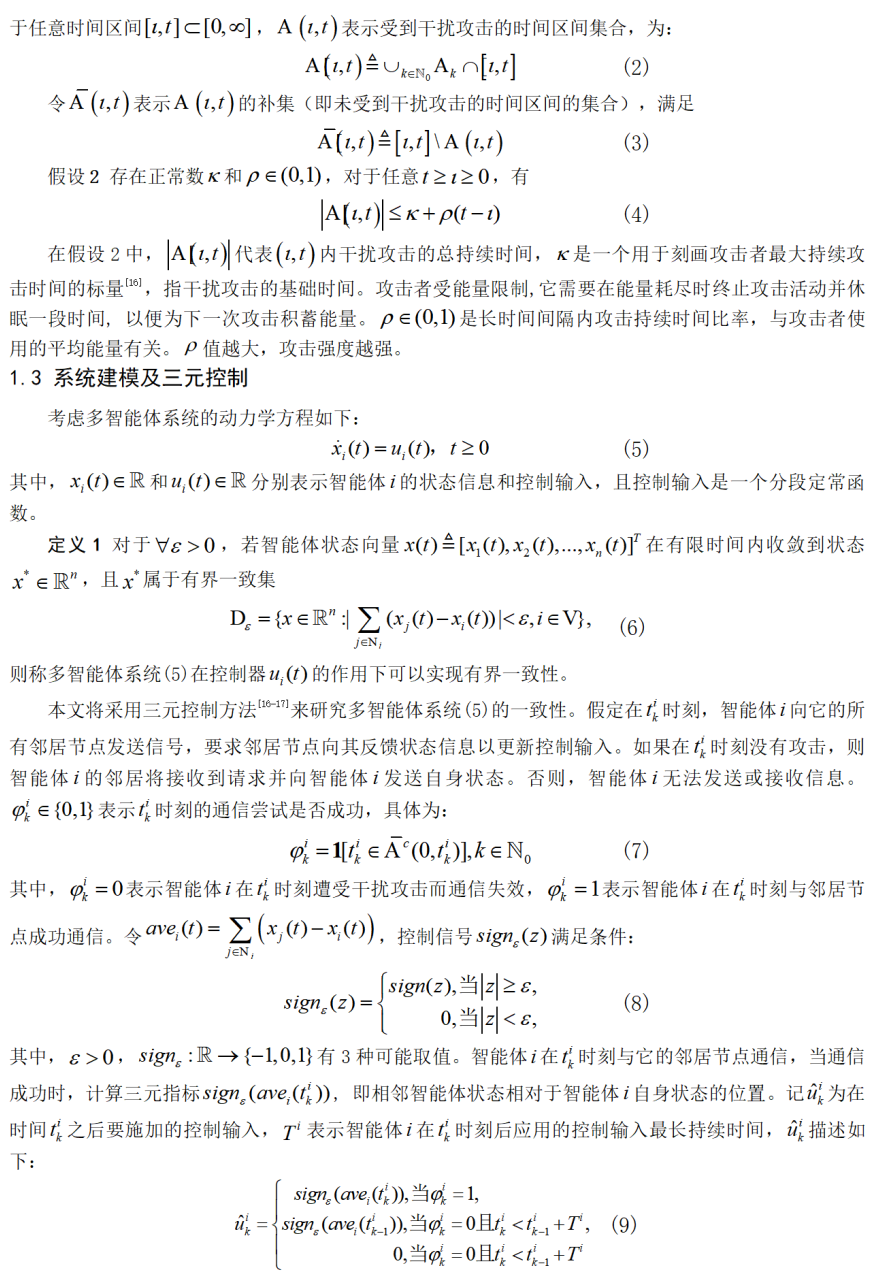
基于ZGS的大规模多智能体系统的分布式优化算法2018-02-24 934
-
基于消息驱动的多Agent通信系统结构研究2017-12-11 1232
-
级联型多电平逆变器随机脉宽调制的仿真研究2016-05-11 1098
-
基于协进化和CPN的多智能体系统建模2010-02-23 1016
-
基于多智能体的多机器人控制研究2010-01-20 820
-
基于多体系统动力学的空气悬架大客车平顺性试验仿真研究2009-12-02 4156
-
基于多智能主体系统的工程机械机群智能化研究2009-09-19 2609
-
基于多Agent系统的智能家庭网络研究2009-06-14 4460
全部0条评论

快来发表一下你的评论吧 !
