

永磁同步电机无差拍电流预测矢量控制学习
电子说
描述
导读:本期文章主要介绍永磁同步电机无差拍电流预测矢量控制,与传统的永磁同步电机PI调节的矢量控制作对比。
一、引言
为解决经典PI 控制下电流波动大,反馈电流跟踪性能不佳,导致电流静差过大的问题,在矢量控制的总体框架下引入无差拍电流预测控制。
无差拍是离散控制系统中概念,主要指系统过渡到稳定运行状态的采样周期尽可能缩短,最终目的是让趋近时间达到一种无差的状态。当应用在PMSM 控制系统中时,能够有效降低电机启动和系统因负载变化时所产生的一系列波动,对提高系统的整体控制性能作用明显,但依赖于高精度的电机参数,容易受到参数失配的影响。
二、DPCC的工作原理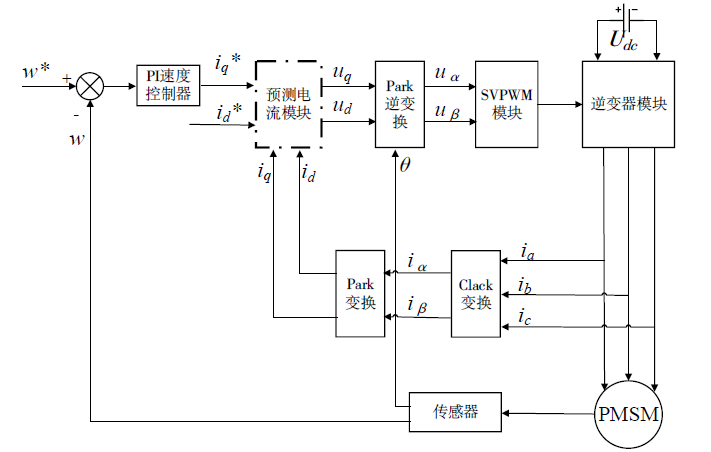
图1 基于DPCC的PMSM控制框图
上图1 所示为无差拍预测控制基本框图,其中虚线部分为引入的无差拍预测电流控制(DPCC)控制算法。DPCC 是预测控制的一个发展方向,在PMSM 控制系统中主要应用于电流环中。首先离散化同步旋转坐标系下的数学模型,从而推导出无差拍电流预测的基本控制算法,其次通过在线优化电流误差,并对每个周期的电流进行调整,来计算出作用于当前时刻的指令电压值,并通过SVPWM 调制装置成功计算出作用于开关管的PWM 波,利用此模型可以准确预测出电流在下一周期到达的给定值。由于该算法结合了空间调制技术,其电压利用率高,并且开关频率固定、相电流谐波含量较低、电流响应速度快,所以应用于一些高性能要求的场合。
三、仿真建模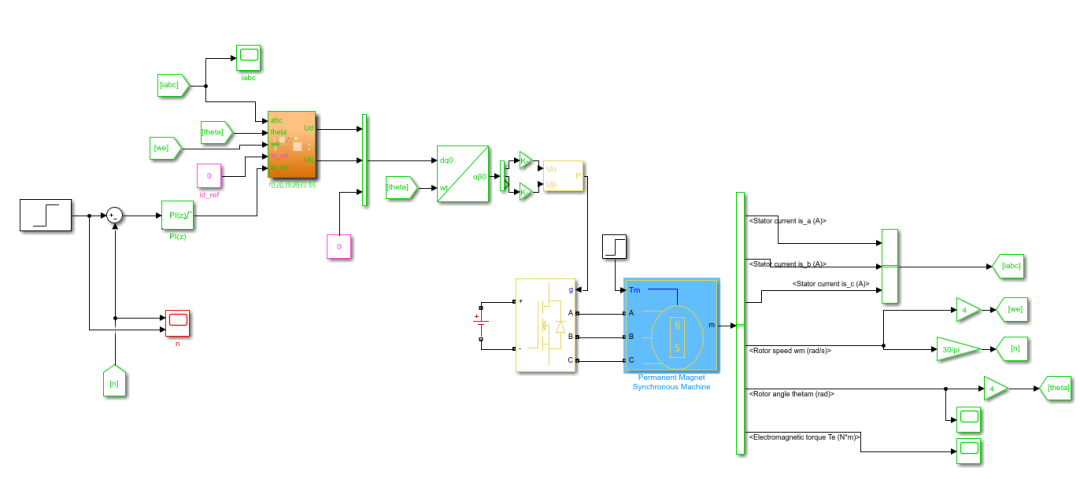
图2 基于DPCC的PMSM控制系统仿真
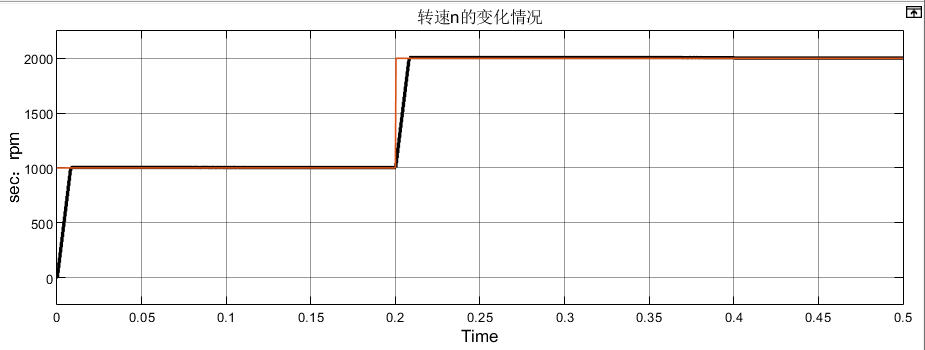
图3 电机转速变化情况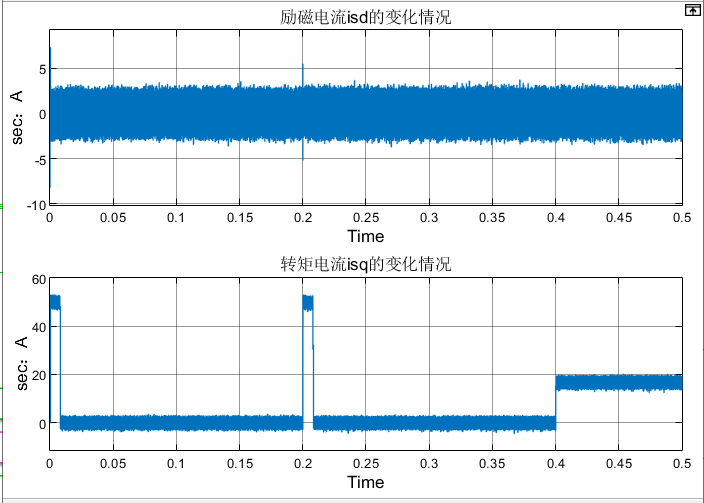
图4 d、q轴电流变化情况 由图3、4 可知,当采用PI+DPCC 对PMSM 进行控制时,在电机到达给定转速时,仍然存在约20%的超调现象。但由于DPCC 的存在,PMSM 的转矩变得更加平滑,降低了抖振幅度。
审核编辑:刘清
-
永磁同步电机矢量控制策略分析2025-03-20 461
-
永磁同步电机的矢量控制原理是什么2021-10-14 2903
-
永磁同步电机的矢量控制策略2021-08-27 1959
-
永磁同步电机模型预测控制matlab/simulink仿真模型2021-07-05 2555
-
基于矢量控制的永磁同步电机控制方法综述2021-06-29 1871
-
三相永磁同步电机矢量控制2021-05-19 1586
-
一种永磁同步电机电流直接反馈矢量控制_朱军2017-01-08 885
-
永磁同步电机矢量控制系统2016-03-30 729
-
永磁同步电机矢量控制原理2014-01-22 66300
全部0条评论

快来发表一下你的评论吧 !
