

基于实车在环(ViL)的自动驾驶功能一致性评估
描述
作者 | Br1anQ、Chrans
小编 | 不吃猪头肉
 引言
引言
自动驾驶功能的开发和评估在汽车行业内已经很常见了。尤其是自动泊车功能,其低速和小范围操作使得更容易用自动方式实现。但是,想要让使用者满意,这些功能必须能够顺畅地执行,至少要与人类驾驶员一样快。本文将介绍德国MdynamiX及其合作伙伴联合实现的适用于实验室开发的实车在环(ViL)方法,以支持自动驾驶功能一致性开发和评估。 ViL方法的应用
ViL方法的应用
无论是部分自动化,还是全自动化,泊车功能自动化水平不断增加。尽管泊车时车速不高,但是测试自动泊车功能复杂且高成本,因为泊车场景种类众多。为了确保所有交通参与者的安全,不同车辆、不同环境、不同情况下的泊车,比如倒车入库、侧方停车,带来了诸多挑战。如果想要测试所有这些场景,测试将很复杂。比如儿童出现在视野盲区的测试场景,很难正常进行实际测试。
出于这些原因,有必要通过虚拟场景找到合适的解决方案,在所有开发阶段,以合理的经济成本,验证和评估相关功能。
实车在环(ViL)方法提供了可行的方案。ViL方法结合了实车测试和计算机仿真的优势。真实车辆的运动(被测车辆),包括所有子组件,被传输到仿真中,使得在虚拟世界中的被测车辆的驾驶能够模拟真实物理世界的驾驶,而不需要参数化复杂的车辆模型。仿真的虚拟环境将注入被测车辆的真实传感器,使得被测车辆能够感知并响应虚拟环境。从而全面测试自动泊车控制功能与车辆执行器之间的交互。由于ViL使用虚拟环境,设计场景具有很高的灵活性,利于关键安全场景的设计。
 MXeval——KPI评估
MXeval——KPI评估
为了全面比较手动和自动停车操作(部分自动或全自动),需要一种标准化的评估方法——阶段模型方法,将停车操作划分为独立部分。除了阶段模型之外,需要客观的关键性能指标(KPI)进行评估。MdynamiX的MXeval分析软件正是满足这样的要求,不仅能够用于车辆动力学和自动横向和纵向引导驾驶功能的评估,而且包含用于自动停车的测试库。可以确定具体的评价标准和要追求的目标值,并将其纳入评价程序。对测量数据的评估以全自动模式高效地进行,根据需求,可以在实车环境中或远程连接进行。除了评估图表之外,KPI也是一览无余。所有评估结果最终都会保存在报告中。整体的评估过程如下图所示。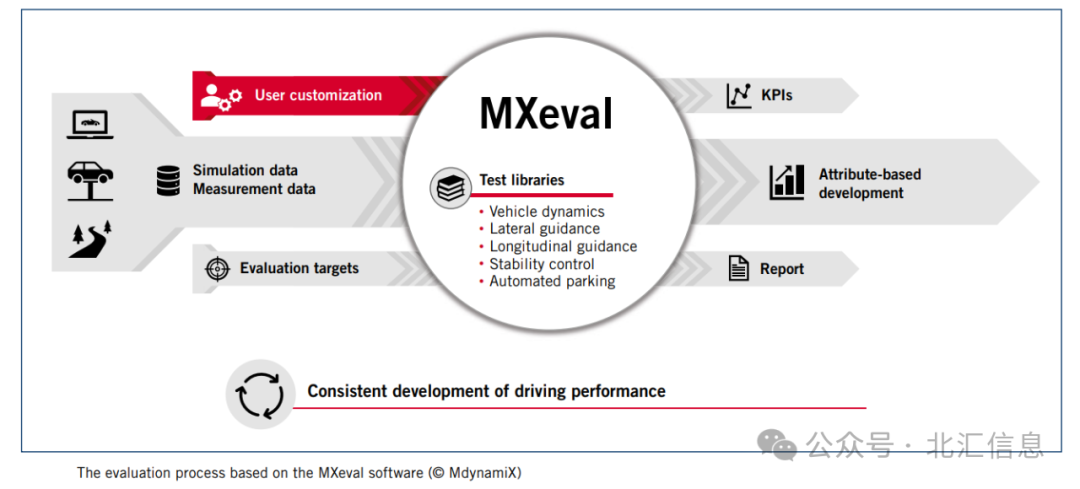 图3 MXeval软件评估流程
图3 MXeval软件评估流程 结果
结果
本测试中,被测车辆在真实和虚拟环境中都进行操作。在图4和图5中,展示了八组测量值的比较,每组测量值都是针对实际的停车位,及其对应的虚拟车位,进行侧方停车得到的。图4显示,各测量结果表现出一致的趋势。进一步比较可以看到,测量结果非常相似,尤其是在初始运动时刻,只有细微的差异。例如瞬时车速KPI,在实车和仿真中几乎相同。
此外,图4显示了初始运动后续时刻的速度曲线相似。初始运动的最大速度和瞬时速度都比较相近。真实环境中的平均速度为3.43公里/小时,虚拟环境中为3.49公里/小时。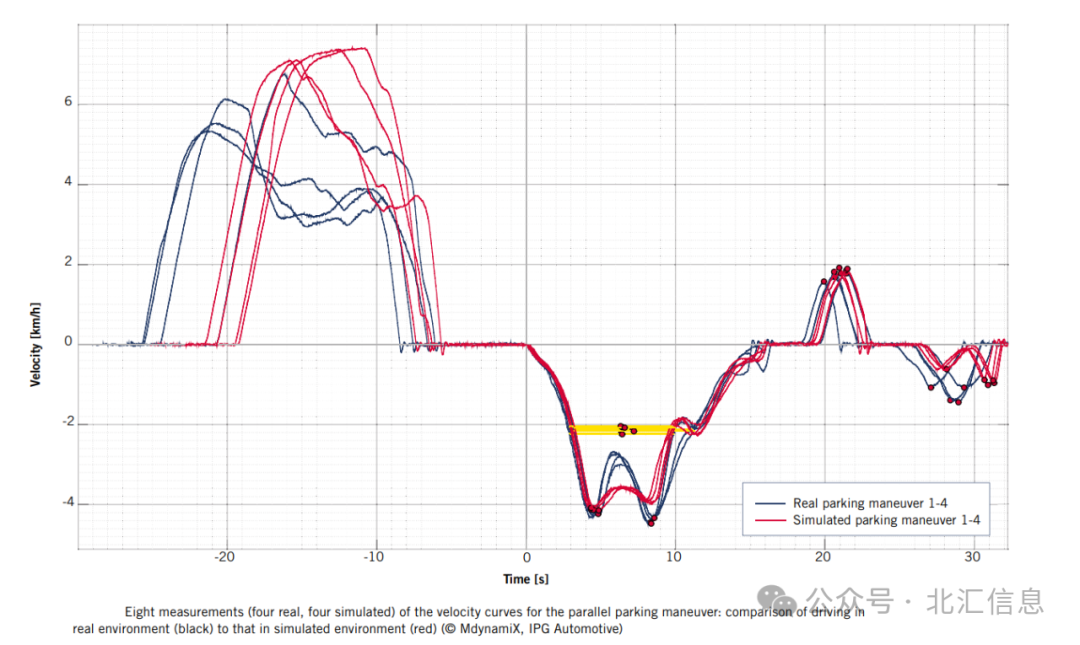 图4 八组侧方停车车速对比
图4 八组侧方停车车速对比
值得注意的是,在真实和虚拟环境,比较整个操纵过程中的方向盘转角输入,发现四组测量值,在初始移动(时间点0到16s)中几乎相同,如图5所示。然而在16s之后,方向盘转角输入出现显著差异。这些差异可归因于实车手动转方向盘没有转向机器人——手动转方向盘的基准差异很大是很常见的。特别是对于停车辅助系统,即使是同一车辆,起始位置起着决定性作用,导致不同停车策略和轨迹。此时,使用转向机器人可能是有利的。
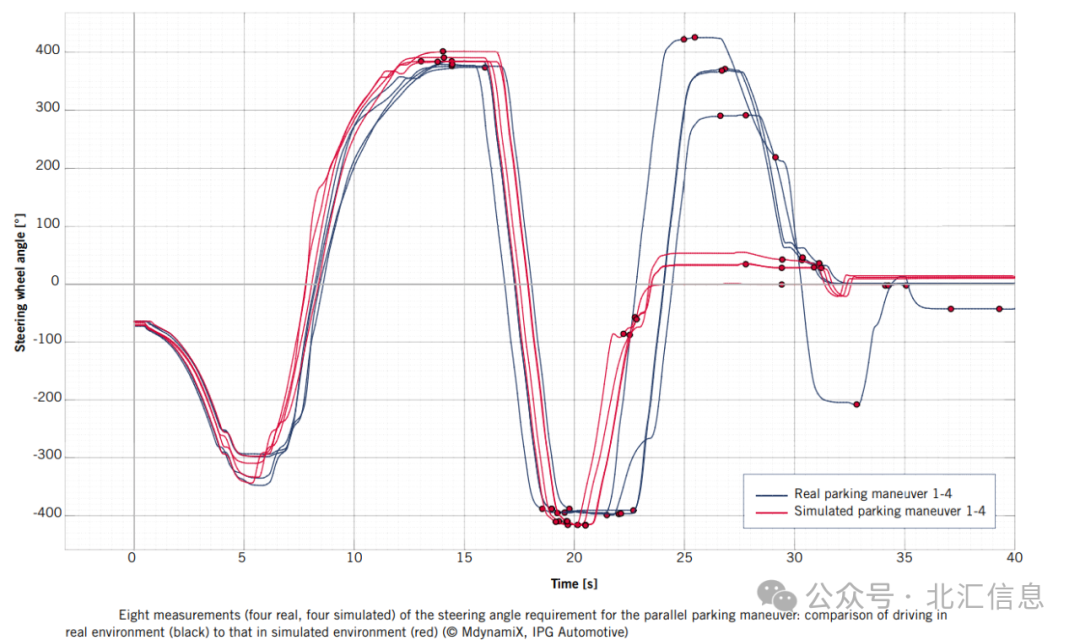 图5 八组侧方停车方向盘转角输入对比
图5 八组侧方停车方向盘转角输入对比
有多种KPI用于评估停车辅助系统。其中一些是决定性的,尤其是对于初始运动。表1展示了部分KPI。同样,实车和仿真两种环境的KPI非常相似是显而易见的。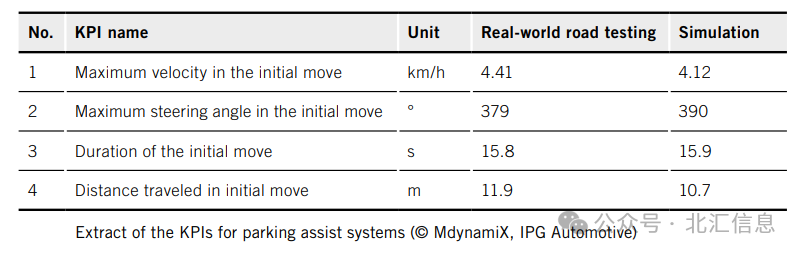 表1 停车辅助系统部分KPI总体而言,ViL方法,不仅是由于法规要求,出于验证目的仿真愈发重要,而且也为传统的实车测试提供了有效的补充和/或替代方案。
表1 停车辅助系统部分KPI总体而言,ViL方法,不仅是由于法规要求,出于验证目的仿真愈发重要,而且也为传统的实车测试提供了有效的补充和/或替代方案。

总结与展望
本文中MdynamiX及其合作伙伴共同呈现的这一测试方案,可作为大多数自动驾驶功能的基础,能够在所有开发阶段,评估功能开发的成熟度,验证功能目标的实现。它能够有效地比较不同实车和仿真的结果,并验证仿真质量。此方案使得真实和仿真车辆行为高度一致变为可能。
此外,ViL方法也适用于其他基于传感器的高级驾驶辅助系统。尤其是在安全相关测试中,例如NCAP测试,ViL方法显示出巨大的降本潜力。随着要求变得更加复杂,将出现新的、高风险操作,ViL方法的好处可能更加深远。
-
自动驾驶真的会来吗?2016-07-21 14497
-
车联网对自动驾驶的影响2019-03-19 3555
-
如何让自动驾驶更加安全?2019-05-13 3729
-
TekExpress一致性自动测试平台的功能有哪些?2021-04-09 1643
-
顺序一致性和TSO一致性分别是什么?SC和TSO到底哪个好?2022-07-19 2676
-
一致性规划研究2009-04-06 680
-
泰克推出DisplayPort一致性测试的全自动化解决方案2011-11-17 1365
-
ArterisIP推出Ncore 2.0 缓存一致性互连及Ncore Resilience 套件,加速下一代自动驾驶与ADAS设计开发2017-04-14 1414
-
加速器一致性接口2017-11-17 4555
-
Cache一致性协议优化研究2017-12-30 1180
-
自主驾驶系统将使用缓存一致性互连IP和非一致性互连IP2019-05-09 4091
-
铁轨铝磁环电感性能一致性差的原因2023-11-13 495
-
DDR一致性测试的操作步骤2024-02-01 4300
-
深入理解数据备份的关键原则:应用一致性与崩溃一致性的区别2024-03-11 2245
全部0条评论

快来发表一下你的评论吧 !
