

频谱仪多种内核通信机制的方案设计
接口/总线/驱动
描述
多核体系结构为性能提高和节能计算等领域开辟了新的方向。核与核之间的连接方式、通信协调方式等都是研究重点。本课题的研究基于手持式频谱分析仪系统平台,该系统采用的是ARM、DSP、FPGA的三核架构。各核心分别完成不同的任务,然后核心间进行参数发送、数据交换,实现系统功能。设计重点是解决核心间的通信问题。
1 ARM与DSP、FPGA通信的硬件设计
手持式频谱仪中频信号处理板主要包括4个部分:模数转换器(AD9244)、FPGA(XS3C5000)、DSP(TMS320C6412)、ARM(AT91RM9200)。ARM在手持式频谱仪中的位置和作用如图1所示。
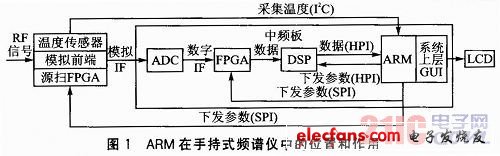
ARM的硬件设计参考Atmel公司提供的评估板资料。主要包括以下几个单元电路的设计:电源电路、时钟电路、复位电路、启动模式选择电路、JTAG接口电路、Debug串口电路、外部扩展SDRAM电路、外部扩展NOR Flash(AM29LV320DB)电路、与DSP通信的HPI接口电路、与FPGA通信的SPI接口电路、连接温度传感器的I2C接口电路、以太网接口电路。
1.1 HPI接口电路设计
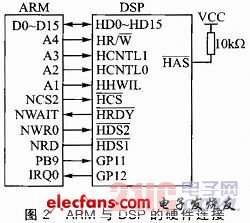
ARM与DSP的HPI总线采用16位数据通信,而且HPI总线是数据和地址复用的。ARM使用部分地址信号线与DSP的HPI总线控制信号相连,通过地址的变换来控制HPI总线。ARM与DSP的硬件连接如图2所示。其中ARM通过地址线A3、A2与DSP的HCNTL1、HCNTL0引脚的连接来选择对HPI C、HPIA、HPID各寄存器进行操作。通过A1与DSP的引脚HHWIL的连接来进行读写时半字的选择。通过A4与
的引脚连接来选择读写。ARM通过PB9向DSP的GP11引脚发送握手信号,DSP通过GP12引脚中断ARM开始数据传输。
1.2 SPI接口电路设计
SPI接口是一种串行通信接口,它由4根信号线组成,其中SPCK、MOSI、MISO为复用,ARM通过片选信号NPCS来选择与不同的从器件通信。本课题中ARM通过SPI总线分别与中频板FPGA、源扫板FPGA通信。ARM与FPGA的硬件连接如图3所示。ARM为主机模式,其SPI接口的SPCK、MIS O、MOSI分别与从机FPGA的SCLK、MOSI、MISO连接。ARM共有4根片选线。这里采用NPCS1选择中频板FPGA,NPCS2选择源扫板FPGA。

2 多核间的通信机制
2.1 ARM与DSP的通信机制
ARM在Linux系统启动后,会先进行一系列的初始化,包括对HPI、SPI等通信接口的初始化以及重启DSP,实现时序上的同步。ARM在初始化完成后,会向DSP发送握手信号,即通过PB9向DSP的GP11口写入数据,表示ARM完成初始化,可以接收DSP的发送数据。而DSP完成数据处理以后,会等待ARM的握手信号,即不断访问GP11口是否收到数据。当DSP收到握手信号之后,会向GP12口写1以中断ARM主机的其他工作,以便ARM来读取DSP已处理好的数据。ARM收到中断信号以后,通过设置HCNTL0、HCNTL1对HPIC操作来清除中断,然后写HPIA以告诉DSP从什么位置开始进行自增读。然后DSP将数据从DMA传送到HPID中,ARM通过读HPID来获得数据。由于ARM与DSP的HPI接口是16位数据传输,所以要软件实现将两次读取的16位数据合并成32位,然后传给上层应用程序。ARM读取完数据后,向DSP的指定地址写入0xffffffff,通知DSP渎取成功,准备下次数据传输。
ARM在接收到上层应用程序下发的命令后,通过对命令的解析、计算,得到各种参数.然后通过HPI下发给DSP。其流程是:首先通过HCNT L0、HCNTL1写HPIC寄存器,配置读写模式。然后写了HPIA寄存器,设置写入DSP的物理地址。通过连续写HPID寄存器来发送控制参数,最后写入0x5555aaaa,表示发送完毕。
2.2 ARM与FPGA的通信机制
ARM集成了SPI接口,通过SPI与FPGA进行数据通信。SPI总线的“单主机多从机”模式正适合本课题中ARM同时与中频板FPGA与源扫版FPG A的通信。ARM启动Linux系统后,先对SPI接口进行初始化,包括对PIO控制器编程,将SPI引脚分配给外设,配置PMC(电源管理控制器)以使能SPI时钟以及将ARM配置为主机模式。当上层软件下发命令后,ARM先将接收到的命令字进行解析,解析命令得到各种参数:经过计算后,通过SPI接口的片选NPCS来选择中频板FPGA或源扫板FPGA来下发参数。
由于中频板FPGA和源扫板FPGA的功能各异,接收的参数也不尽相同,所以制定了不同的数据帧格式及发送规则。ARM向中频板FPGA每帧数据传送16位,传输频率为0.36 MHz。发送顺序为:路由码1、数据帧1、路由码2、数据帧2、结束码。ARM向源扫板FPGA每帧数据传送16位,传输频率为0.36 MHz。发送参数前都要先发送一个存储这个参数的虚拟地址,然后发送参数,顺序为:虚拟地址1、参数1、虚拟地址2、参数2、结束码。
3 嵌入式Linux设备驱动简介
一套完整设备的软件系统开发可分为:应用程序、库、操作系统(内核)、驱动程序。Linux软件系统的层次关系如图4所示。驱动程序的作用存于连接软、硬件,即内核通过驱动程序来完成对硬件设备的操作。在Linux系统中,应用程序运行于“用户空间”,并不能直接操作硬件,这可以避免应用程序的错误使得整个系统崩溃。而驱动程序运行于“内核空间”,它是系统信任的一部分。所以应用程序要对硬件操作,就要首先使用库提供的系统调用来进入内核。内核匹配后,调用相应的驱动程序函数,从而完成对硬件的操作。

Linux操作系统将所有的设备(而不仅是存储器里的文件)都看成文件,以操作文件的方式访问设备。应用程序不能直接操作硬件,而是使用统一的接口函数调用硬件驱动程序。在设计的驱动程序中,首先要根据驱动程序的功能完成file_operations结构中的函数实现,不需要的函数接口可以直接在file_operations结构中初始化为NULL。而file_operations结构变量会在驱动程序初始化时注册到系统内部。当操作系统对设备操作时,就会调用驱动程序注册的file_operations结构中相应的函数指针。
对于Linux驱动的注册有两种方式:一种是直接编译到内核中,在系统启动时即对设备进行注册;另一种是以模块的方式注册设备,需要在系统启动后用命令对设备进行注册。后一种方式在系统开发期使用比较方便,不用在每次修改驱动程序后和内核一起进行编译,只需要将模块编译成后缀为,ko的模块文件,就可下载到开发板中直接使用。在本课题中,使用的是模块注册的方式,在项目开发期间可大大缩短开发时间。
4 Linux设备驱动的实现
对于编写一个Linux设备的驱动程序,大致的流程如下:
①查看原理图、数据手册,了解设备的操作方法。
②实现驱动程序的初始化,比如向内核注册这个驱动程序,这样应用程序传入文件名时,内核才能找到相应的驱动程序。
③设计所要实现的操作,比如open、close、read、write等函数。
④实现中断服务(不是必须的)。
⑤编译该驱动程序到内核中,或者用insmod命令加载。
⑥测试驱动程序。
4.1 HPI设备驱动程序实现
4.1.1 物理地址到虚拟地址的映射
写Linux设备驱动的第一步,是完善头文件中的宏定义,除了各种参数的定义外,主要是实现硬件寄存器的物理地址到虚拟地址的映射。对于硬件寄存器的操作,其实就是对其物理地址进行读写操作。而Linux系统提供了一种内存管理机制,在这种机制下,程序可以使用比真实物理地址大得多的地址空间,称为虚拟地址。Linux系统中程序的操作部是使用虚拟地址,所以要完成物理地址到虚拟地址的映射。本课题采用ioremap函数的方法,如下:
#define AT91C_SMC_CSR2*(volatile unsigned long*)ioremap(0xFFFFFF78.4)
对于ioremap函数,就是将物理地址0xFFFFFF78开始的4字节的地址映射到虚拟地址空间中,返回值即4字节虚拟地址的首地址,赋给宏定义的变量名AT91C_SMC_CSR2。对宏定义的操作即对物理地址的操作。
4.1.2 HPI驱动的初始化
首先是对HPI硬件的初始化以及中断初始化。对于HPI,主要是重置DSP,已完成时序的同步。设置SMC(静态存储控制器),因为ARM跟DSP的HPI通信是使用PIO线复用。最后向DSP发送握手信号,表示初始化完成。对于中断的初始化,使用:
request_irq(AT91C_ID_IRQ0,handler,SA_INTERRUPT,”irqO”,NULL);
此函数向内核注册中断,包括中断号和中断处理函数handler。
对于HPI设备的注册,为HPI设备分配系统未使用的254作为主设备号,0为次设备号。通过register_chrdev_region函数向内核注册。函数cdev_init是初始化设备,其实就是建立设备与file_operations结构的对应关系。最后将设备加入内核。代码如下:

上述的代码都是在驱动模块的hpi_init函数中实现。在HPI驱动被加载到内核时就完成了一系列初始化。
4.1.3 file_operations结构中函数的实现
设计驱动的大部分工作就是实现file_operations结构中的函数。代码如下:

其中,“.owner=THIS_MODULE”表示结构属于本模块,然后是open、read等各函数的对应关系。由于初始化在hpi_init函数中实现,所以open函数并没有特别的操作,主要是在终端输出信息。函数release主要是申请中断资源的释放,使用free_irq函数。下面主要讲解read函数,write函数与之类似,不再详述。
ssize_t hpi_read(struct file*file,char*buf,size_t count,loff_t*offp)
其中,参数file是打开文件的标识符;参数buf和count就是要向buf指向的地址存放count字节的数据;参数offp是文件读取的位置,默认为文件头,不用设置。
在read函数的最开始有如下代码:
wait_event interruptible(hpi_wait,ev_start);
down(&sem);
……
up(&sem);
其中wait_event_interruptible函数会阻塞进程,使其进入等待队列。直到DSP的数据准备好后,发来中断。HPI设备注册的中断处理函数handler会将变量ev_start置1,同时唤醒hpi_wait等待队列。read函数继续执行之后的代码,即开始从DSP的HPID寄存器读取数据到参数buf指向的地址。读取完成后向DSP指定地址写入0xffffffff,表示读取完成。函数down与up是操作二进制信号量,使渎取数据的过程为“原子”操作,避免执行过程中被打断,从而影响读取结果。read函数的流程如图5所示。

4.1.4 资源的释放
与hpi_init函数相对应的是hpi_exit函数,实现的是资源的释放。代码如下:

以上代码包括中断资源释放、映射关系释放、内存释放、没备释放。与hpi_init函数比较可看出,释放的顺序与申请注册的顺序正好相反。
4.1.5 模块的编译、加载
在驱动文件的最后加上如下代码,设置模块加载与释放对应的函数:
module_init(hpi_init);
module_exit(hpi_exit);
完成了驱动程序的编写,将源程序文件在Linux开发环境下编译成.ko的模块文件,使用insmod和rmmod指令来加载和卸载模块。
4.2 SPI设备驱动程序实现
在SPI的驱动设计中,大体的框架跟HPI是相同的。包括头文件宏定义的完善、SPI设备的初始化、file_operations结构中函数的实现、资源释放,最后编译、加载。需要说明的是AT91RM9200自带了SPI接口,所以初始化时要根据芯片手册对SPI接口的I/O线、时钟、工作模式
等进行配置,才能保证硬件的正常工作。在SPI驱动的write函数中,使用了如下代码:
copy_from_user(Ytos,buf,count);
在Linux的驱动设计中,经常涉及到用户空间和内核空间的通信问题,即数据的交换。copy_from_user与copy_to_user函数就是为了实现这一功能。上述代码实现的功能就是将用户空间buf的count字节的内容复制到内核中定义的数组Ytos中,从而完成用户空间和内核的数据交换。驱动的其余实现类似HPI,不再详述。
4.3 驱动的调试
对于程序语法的调试,在编译的过程中解决。根据Linux平台下的交叉编译器arm-linux-gcc的提示信息,修改出现的语法类错误。在保证了驱动文件的成功编译后,对于程序功能的调试,采用打印函数printk跟踪调试。在程序适当的位置加入printk打印信息,如根据设备注册函数的返回值来打印成功或者失败的信息,可以很直观的了解程序的运行情况,是很有效的调试方法。在调试过程中,利用示波器来检测某些通信端口的电平信息,可以了解到是否有数据通信。通过几种手段的结合,最后完成驱动程序的调试。
结语
本课题采用ARM、DSP、FPGA的三核构建的系统平台,将它们各自的优点有机的结合起来。在完成各自的数据处理后,分别通过HPI、SPI接口进行数据交换,在ARM的整体控制下,实现了系统稳定运作。而基于ARM的嵌入式Linux操作系统,还能提供友好的人机交互界面。该平台在智能仪表、信号测试分析等领域都能发挥很好的作用。
-
频谱仪怎么测试发射功率是多少2024-06-03 5057
-
频谱仪的触发方式及其重要性2024-05-20 3060
-
示波器和频谱仪的区别2023-09-19 2819
-
频谱仪是什么,有哪些功能2023-07-31 5659
-
决定频谱仪相噪测试能力的因素有哪些?2022-12-13 2706
-
基于FPGA的简易频谱仪设计与实现2021-06-16 1390
-
频谱仪的使用实践教程资料总结2020-07-13 1931
-
频谱仪和示波器哪个好_示波器和频谱仪的功能介绍2018-01-15 18161
-
频谱仪与示波器有什么区别2017-12-28 11735
-
基于FPGA的太赫兹频谱仪数字单元设计方案2017-11-01 1195
全部0条评论

快来发表一下你的评论吧 !
