

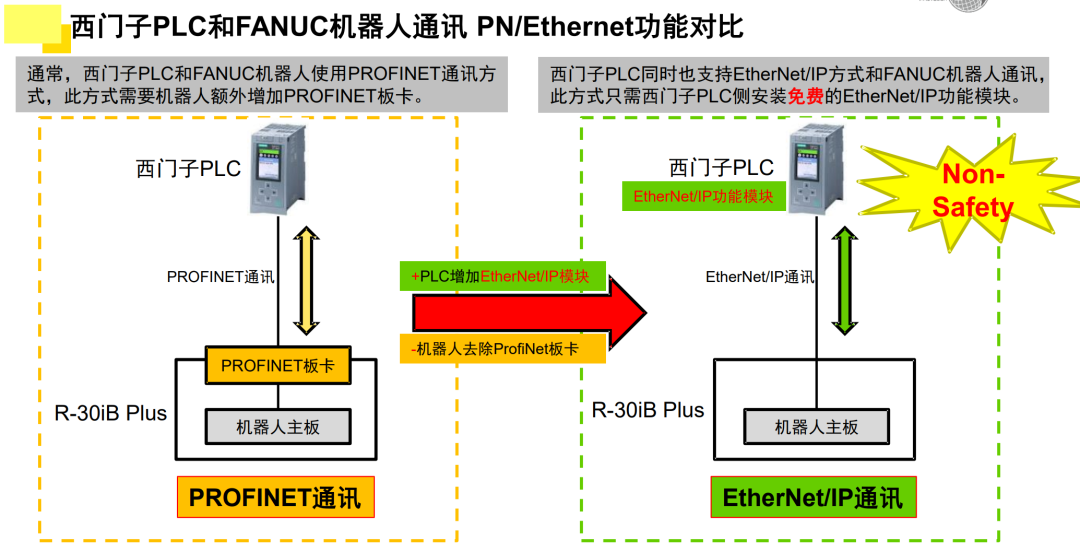
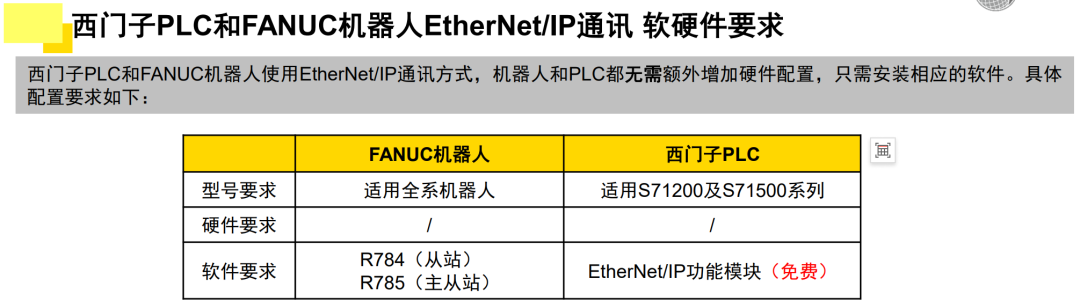
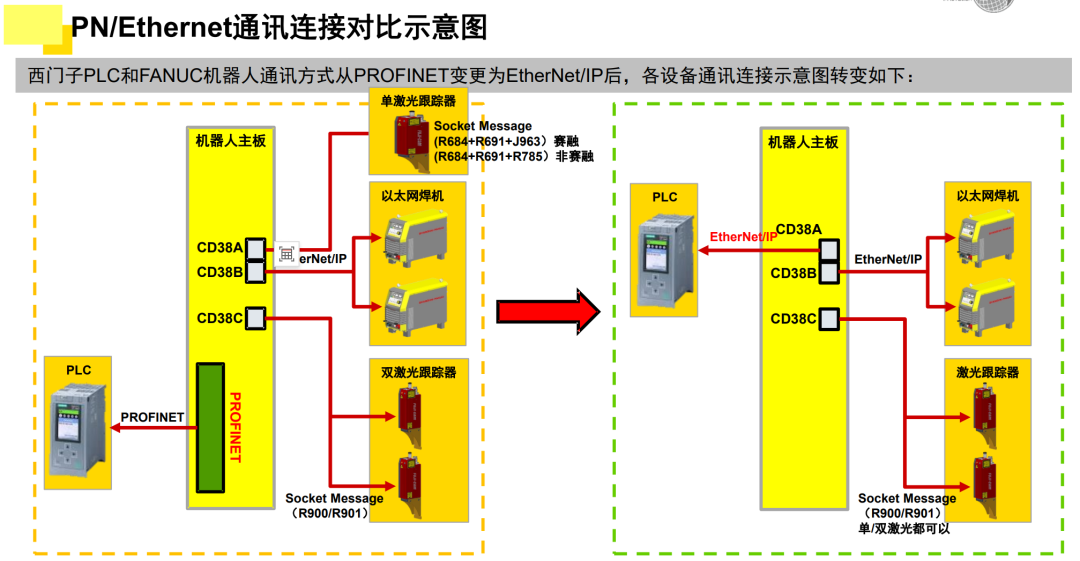
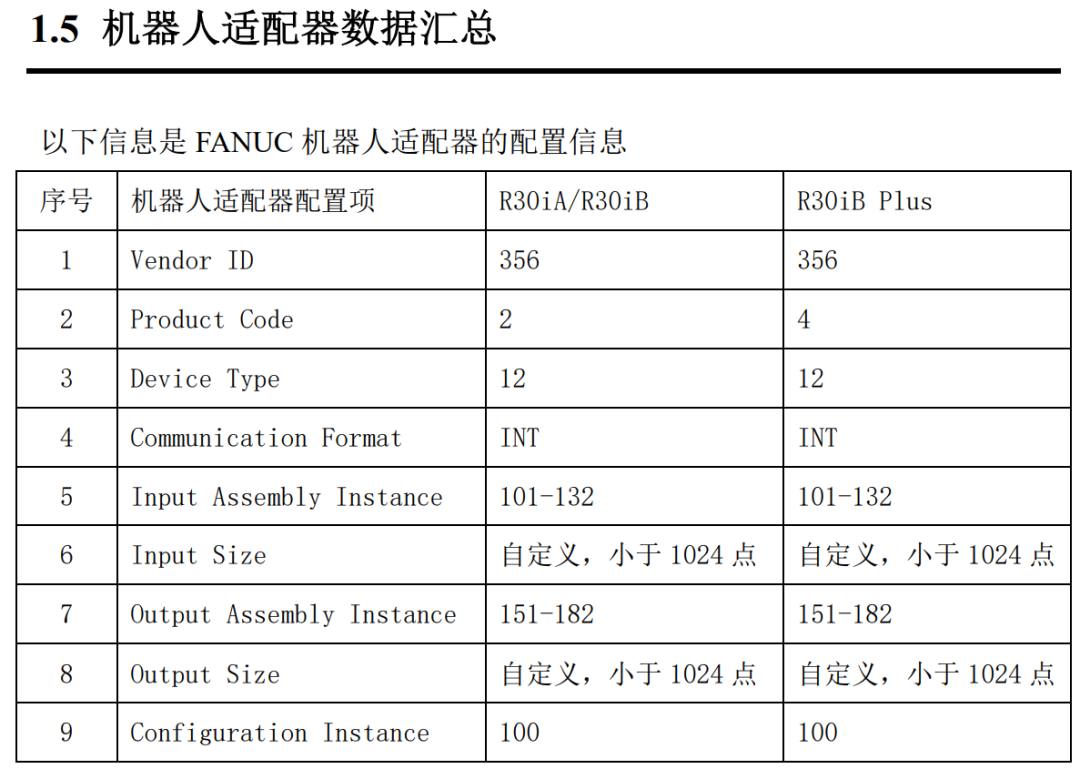
西门子PLC与FANUC机器人如何实现EtherNet/IP通信
机器人
描述

西门子PLC EtherNet/IP功能模块下载地址:
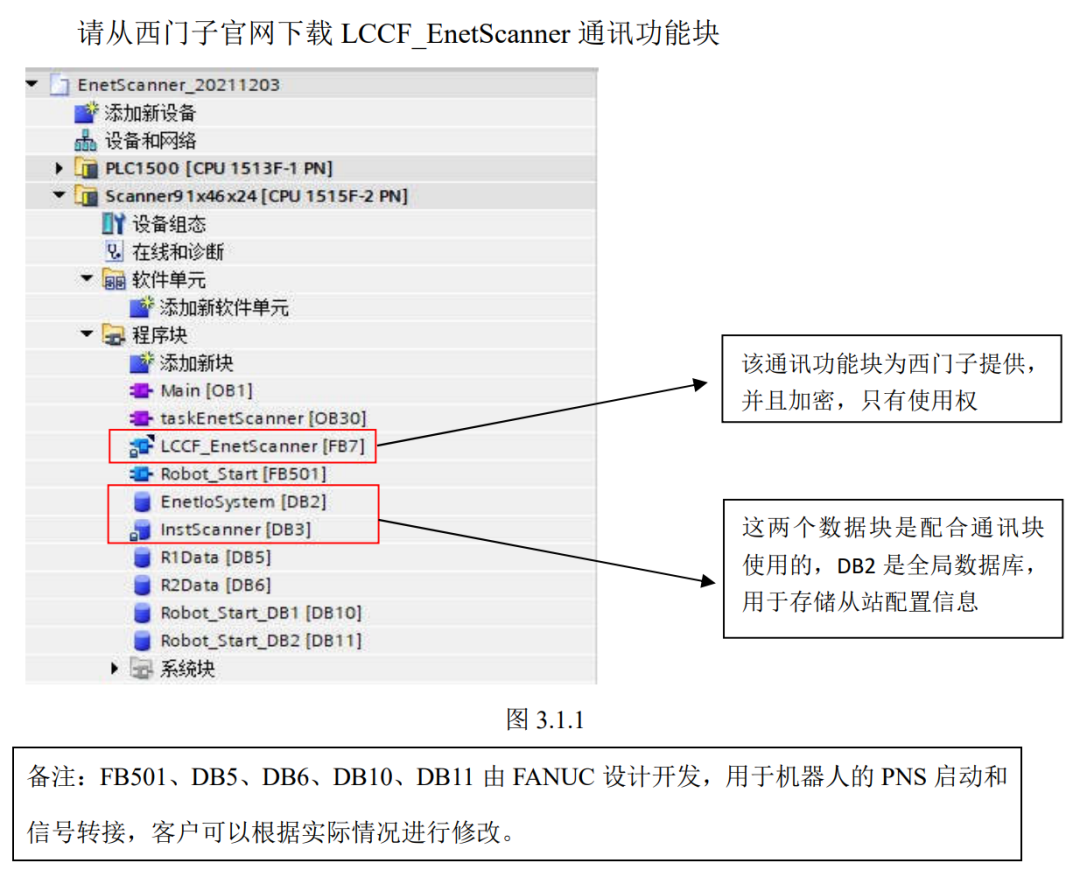
主站模块:
https://support.industry.siemens.com/cs/document/109782314/ethernet-ip-scanner-–-connecting-third-party-i-o’s-using-ethernet-ip?dti=0&lc=en-WW
从站模块:
https://support.industry.siemens.com/cs/document/109782315/ethernet-ip-adapter-connecting-third-party-control-systems-to-simatic-s7-controllersvia-ethernet-ip?dti=0&lc=en-DE
示例配置要求:
输入/输入 64 字节,通讯 RPI 设置 30ms
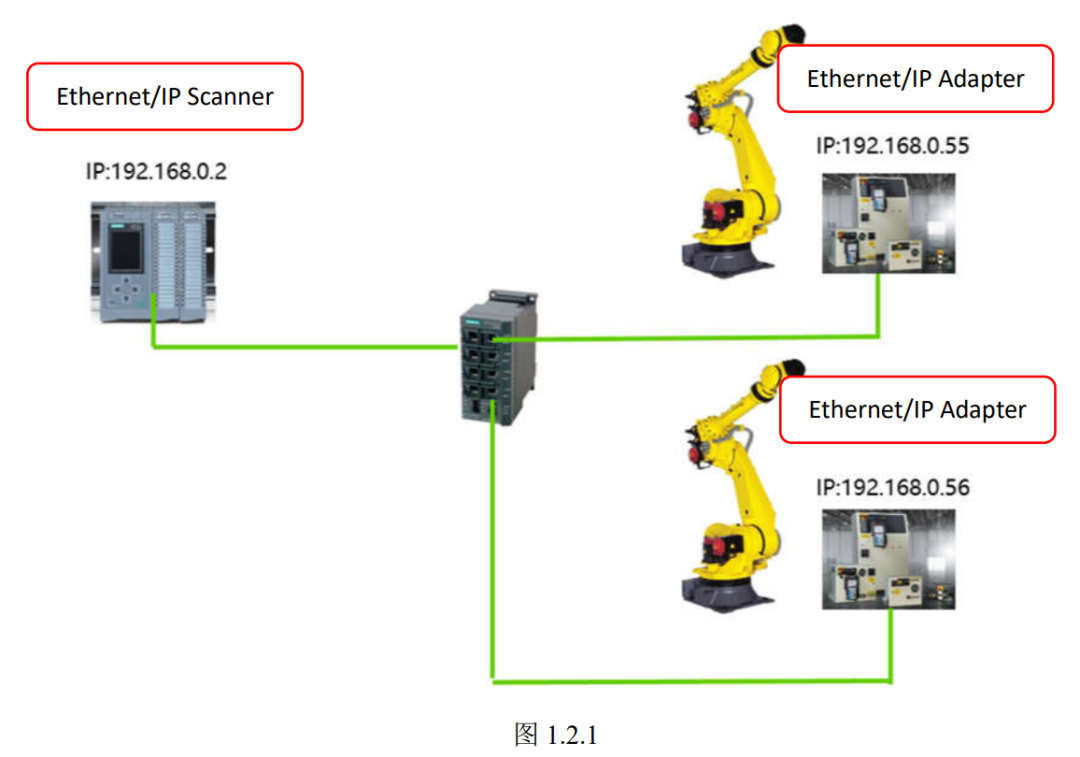
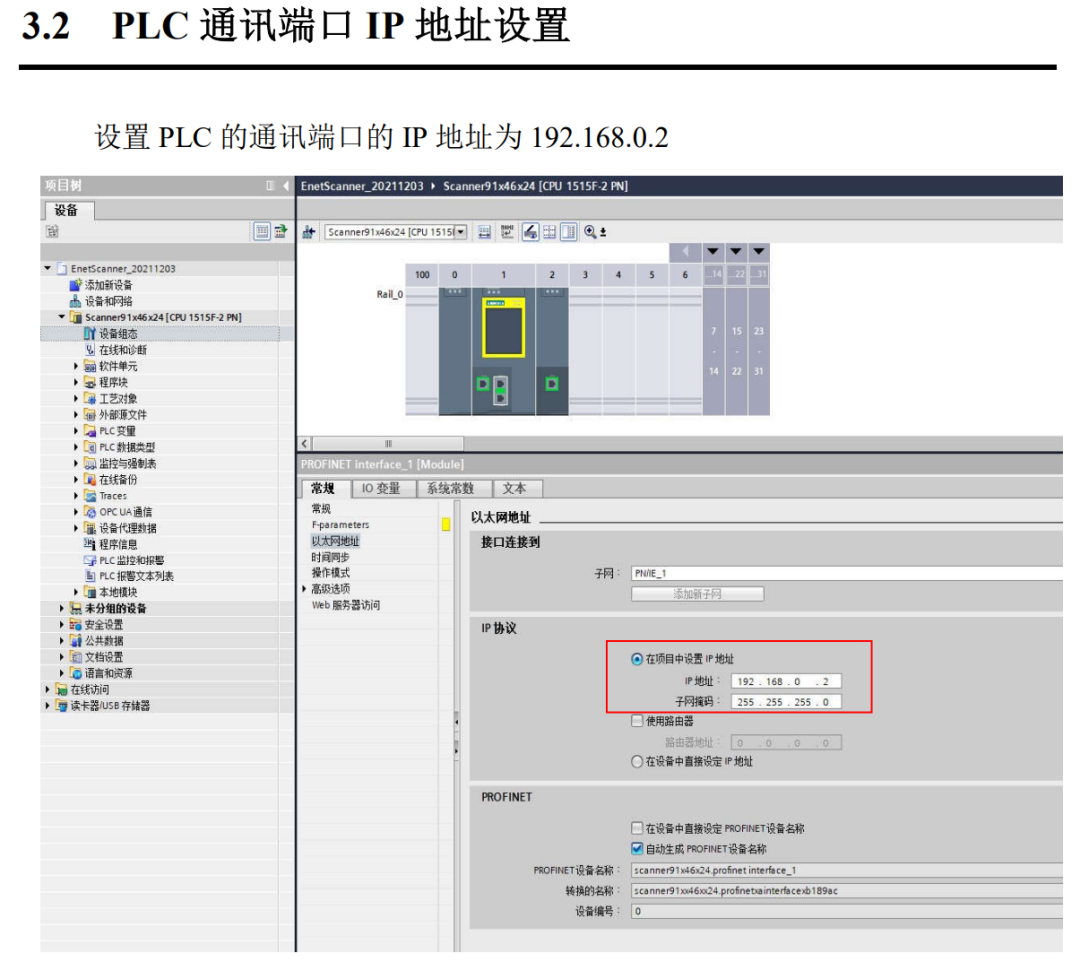
西门子 PLC 作为扫描器,IP 地址设置为 192.168.0.2
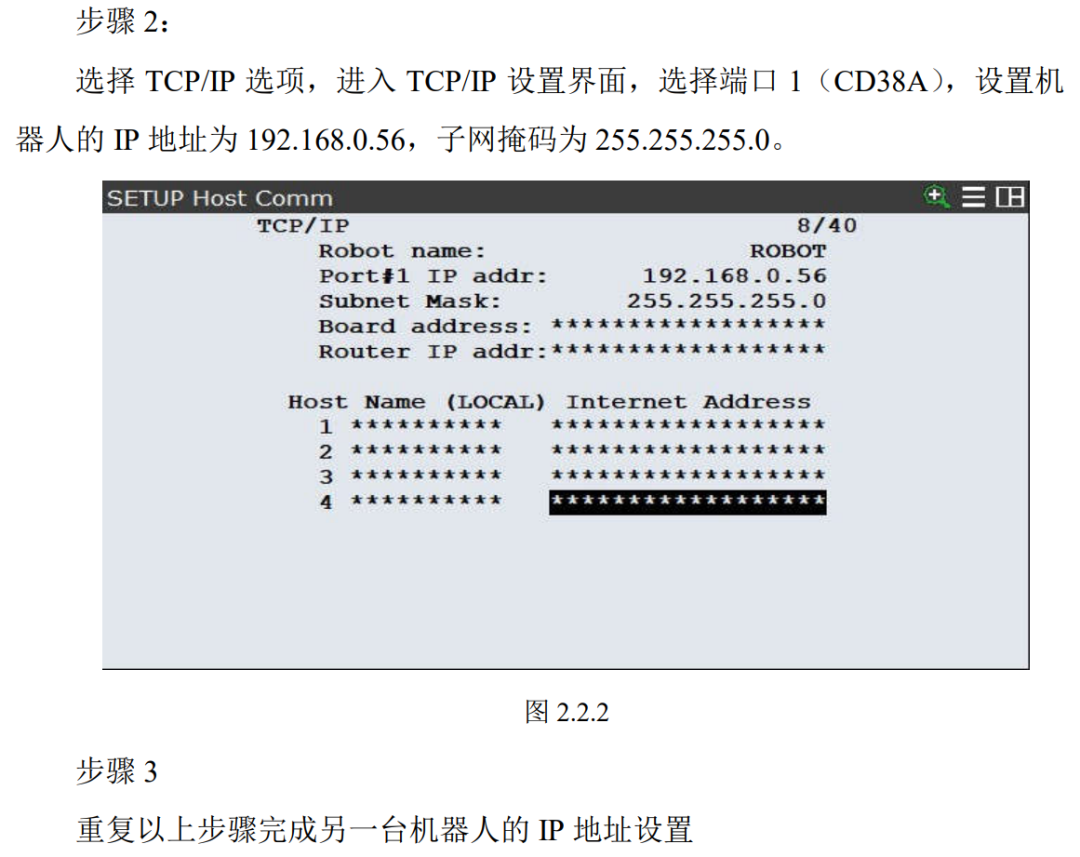
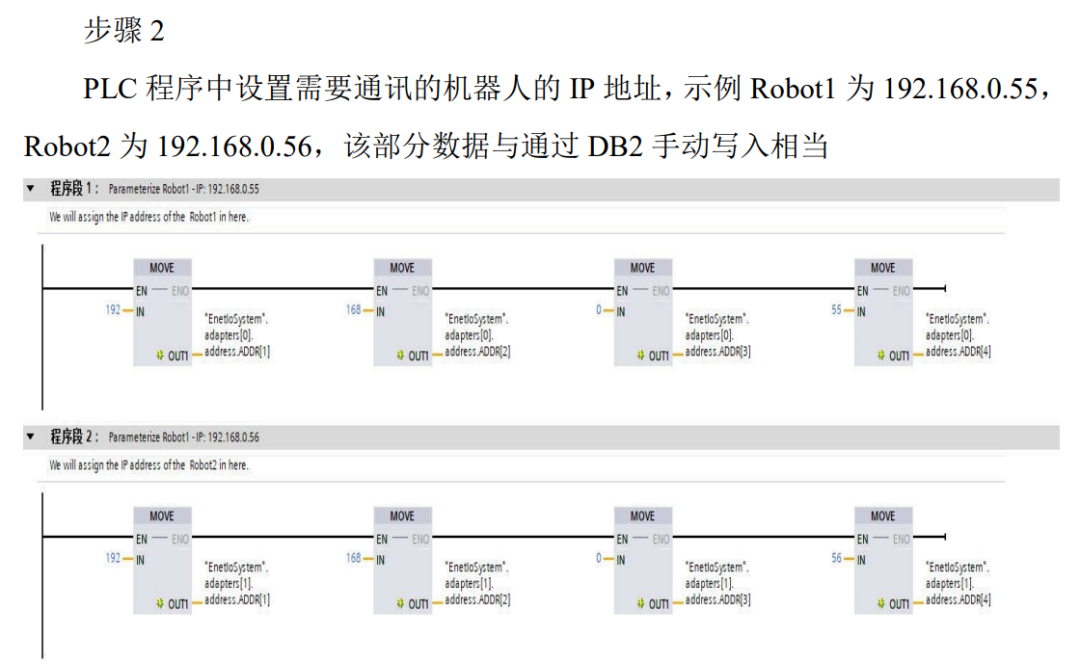
FANUC 机器人作为适配器,IP 地址分别设置为 192.168.0.55 和 192.168.0.56
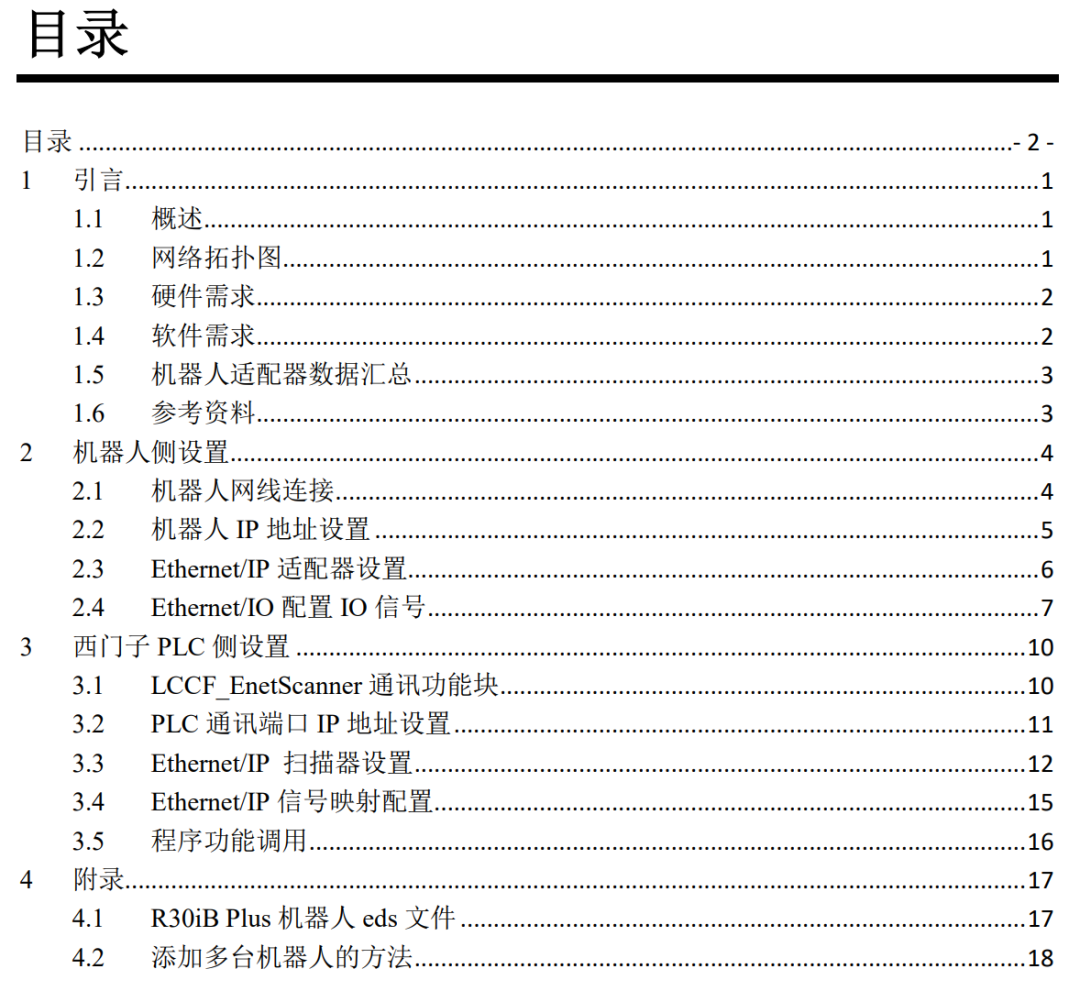
1.6 参考资料
B-82854EN_03 Ethernet/IP Operation Manual 发那科官方资料
B-82974EN_04 Ethernet Function Operation Manual 发那科官方资料
109782314_EtherNetIP_Scanner_DOC_v1_1_en 西门子官方资料
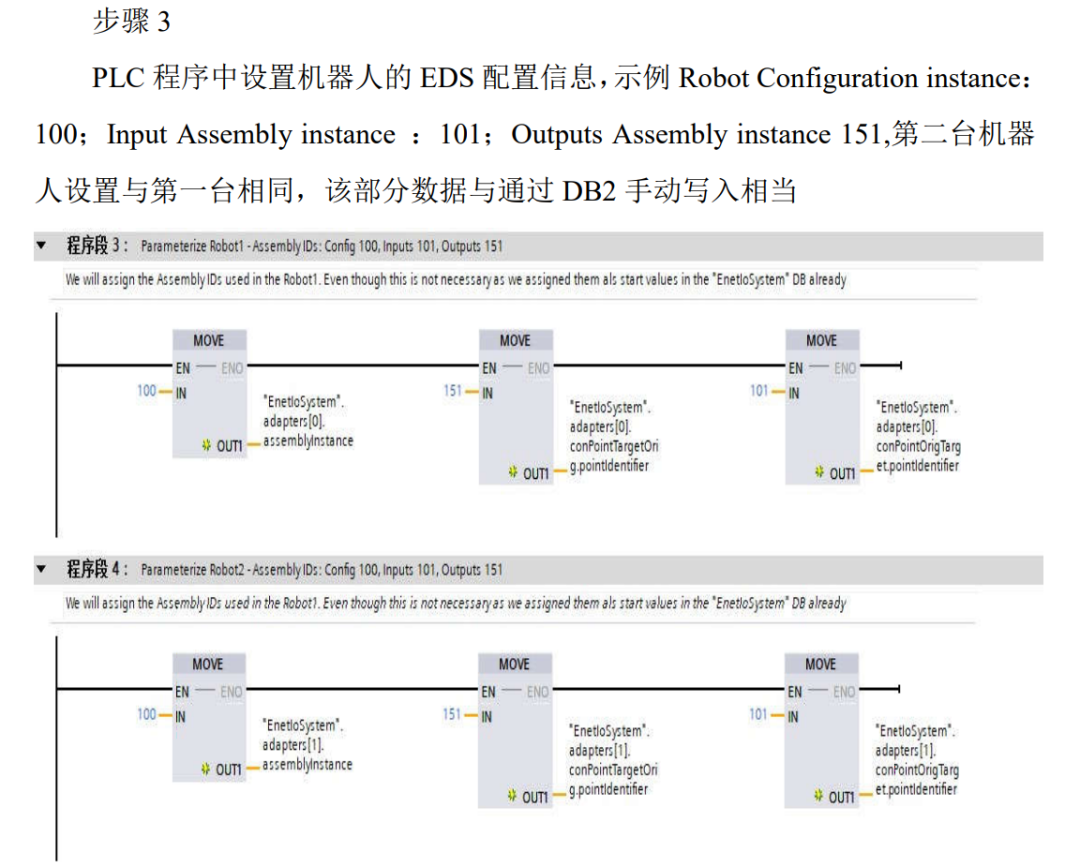
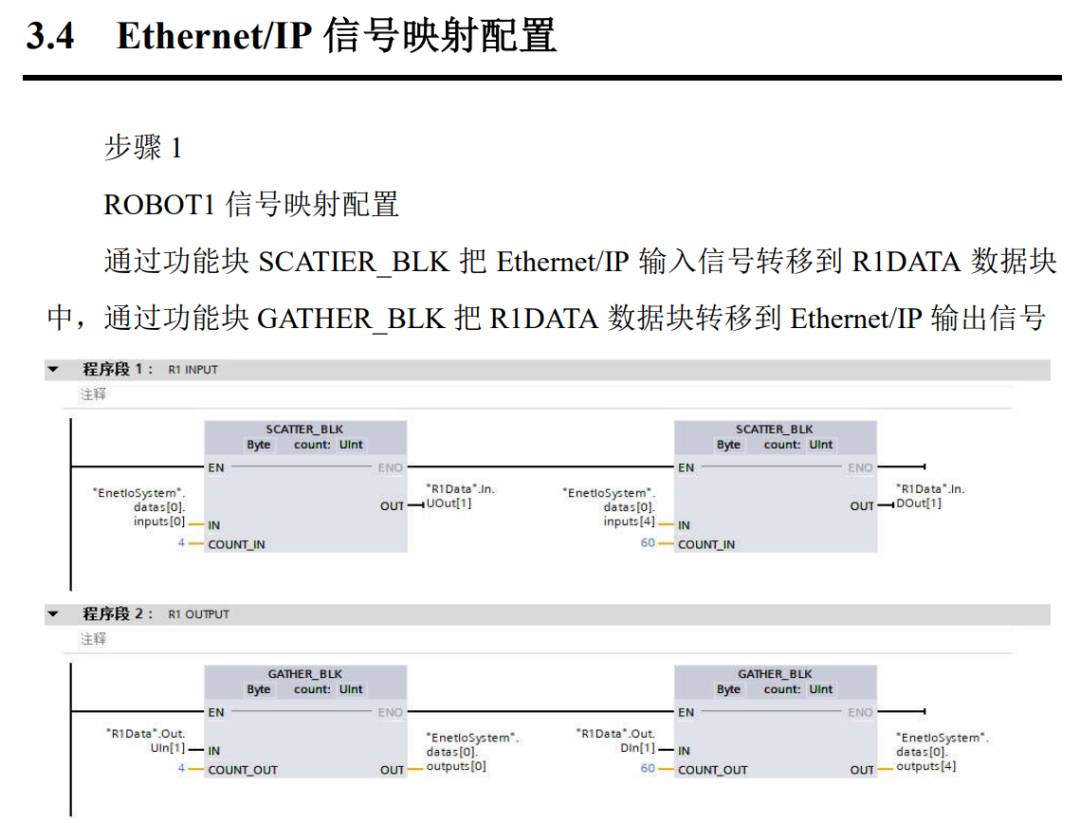
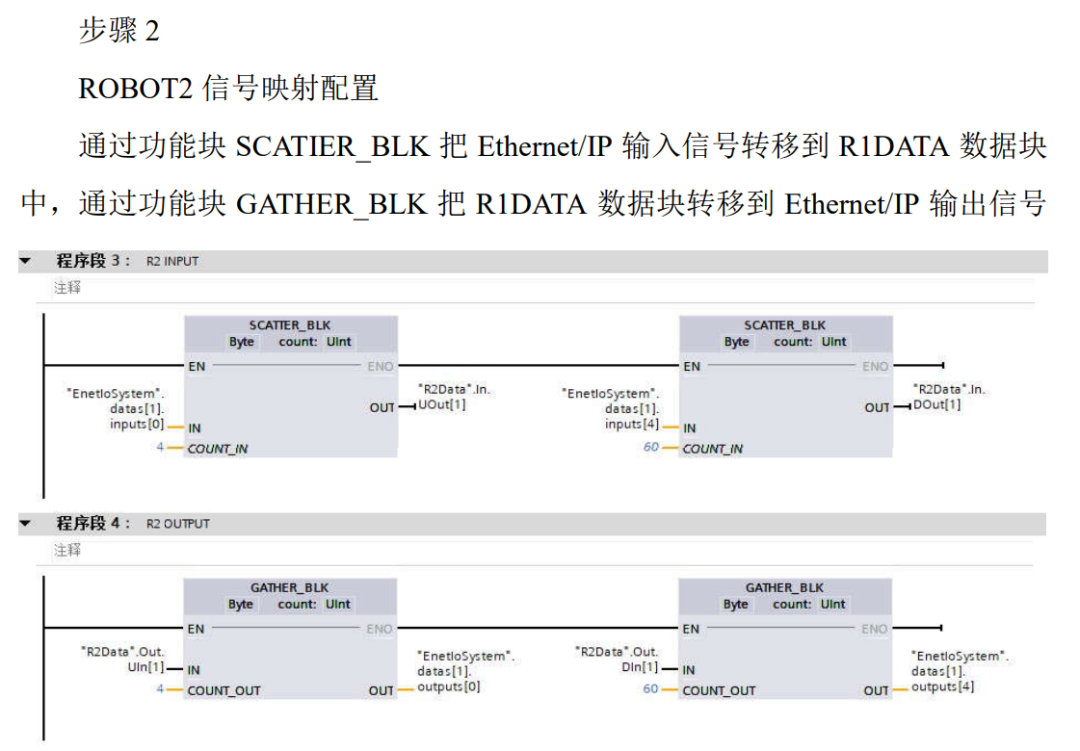
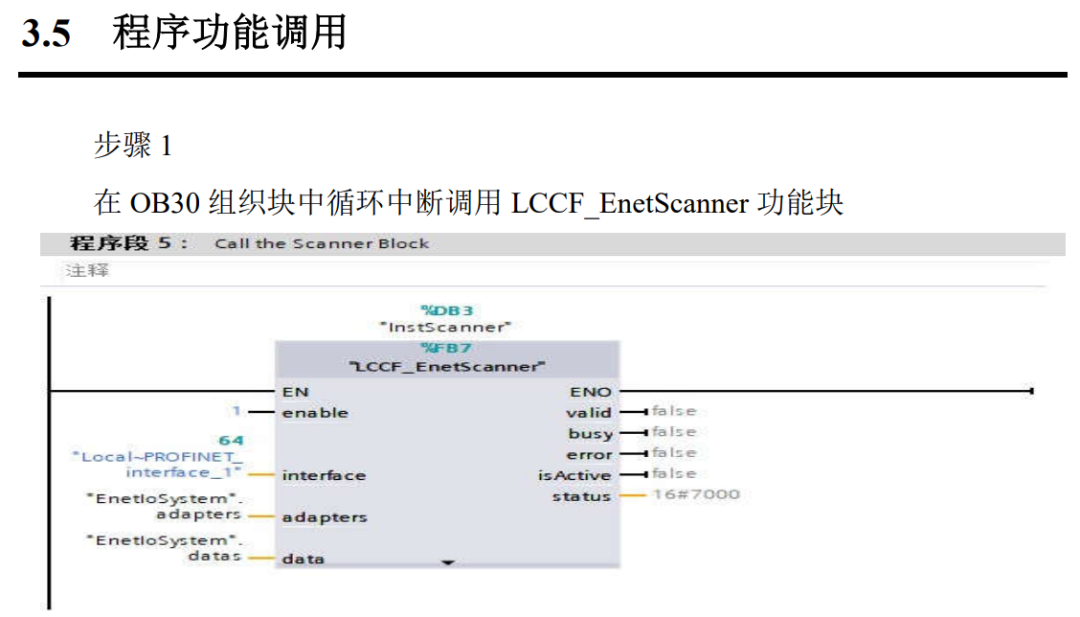
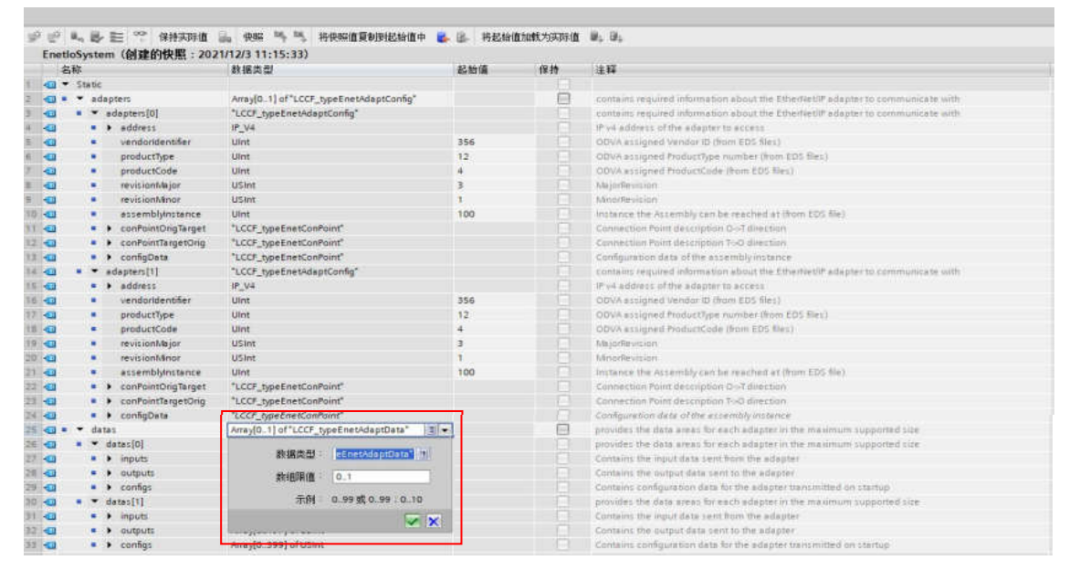
3.3 Ethernet/IP 扫描器设置
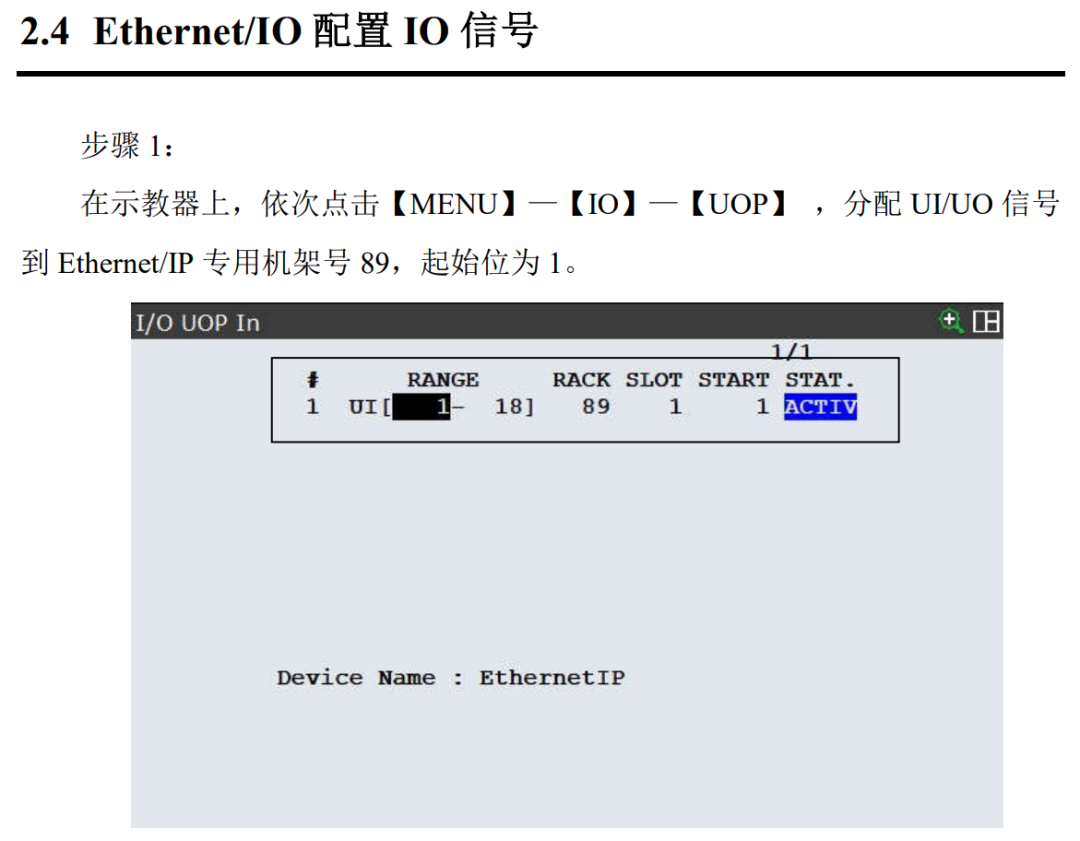
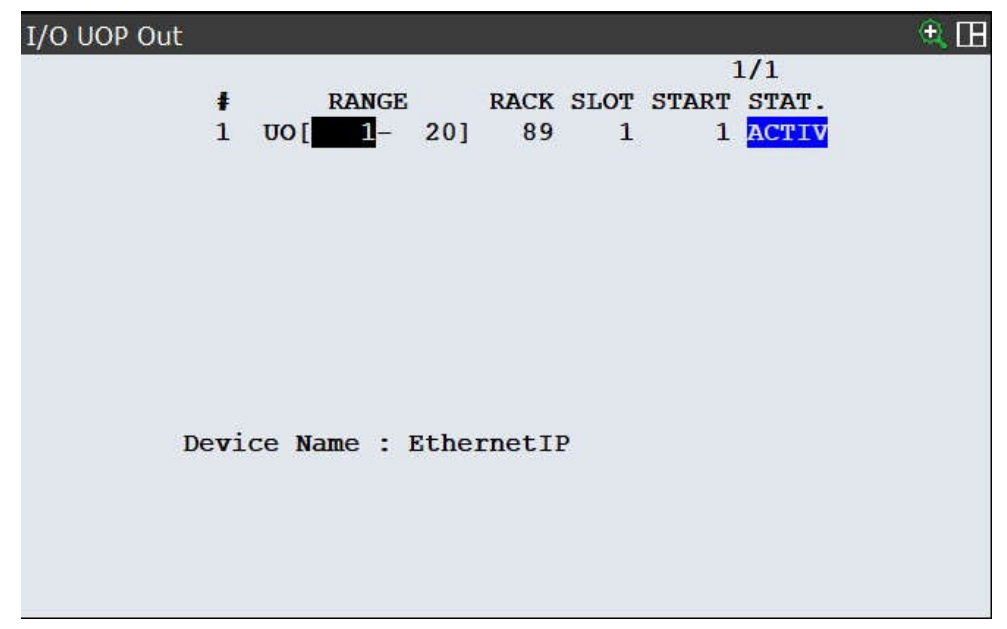
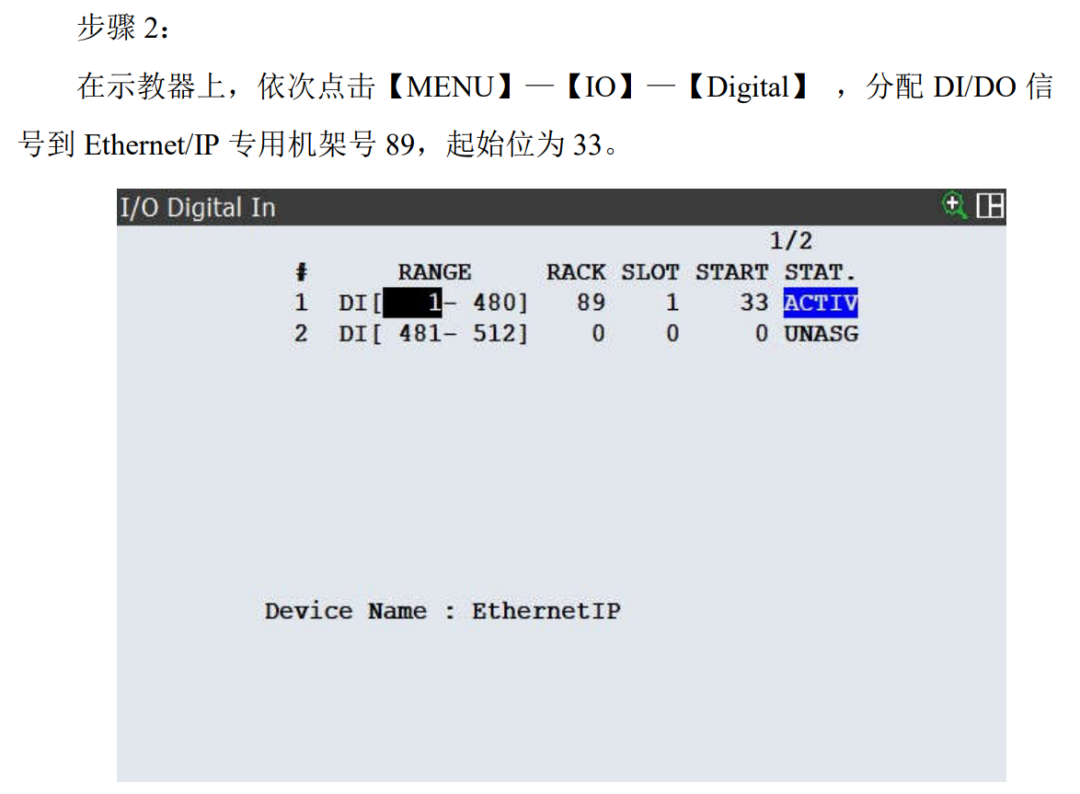
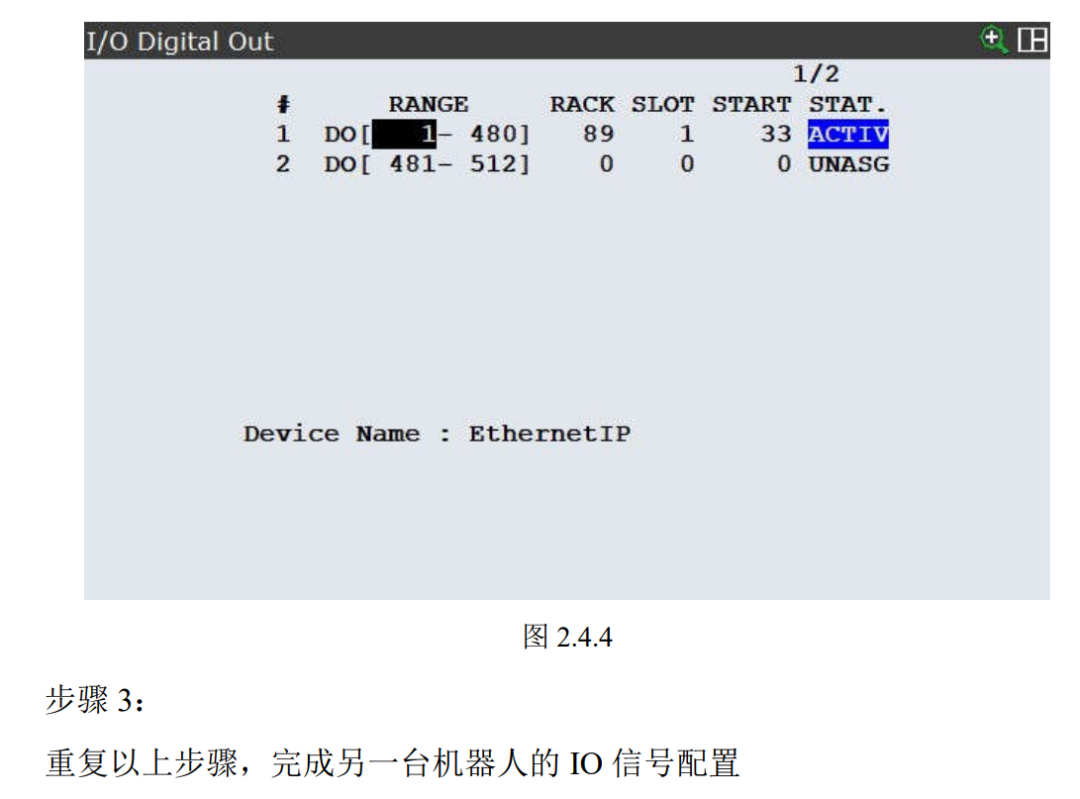
步骤:1
打开 EnetIoSystem(DB2)功能块,设置机器人 EDS 配置信息

备注:机器人默认的 RPI 为 32ms,最快为 8ms;该设置与网络状况密切相关,不建议设置过 低,否则会严重加重网络的通讯负荷。
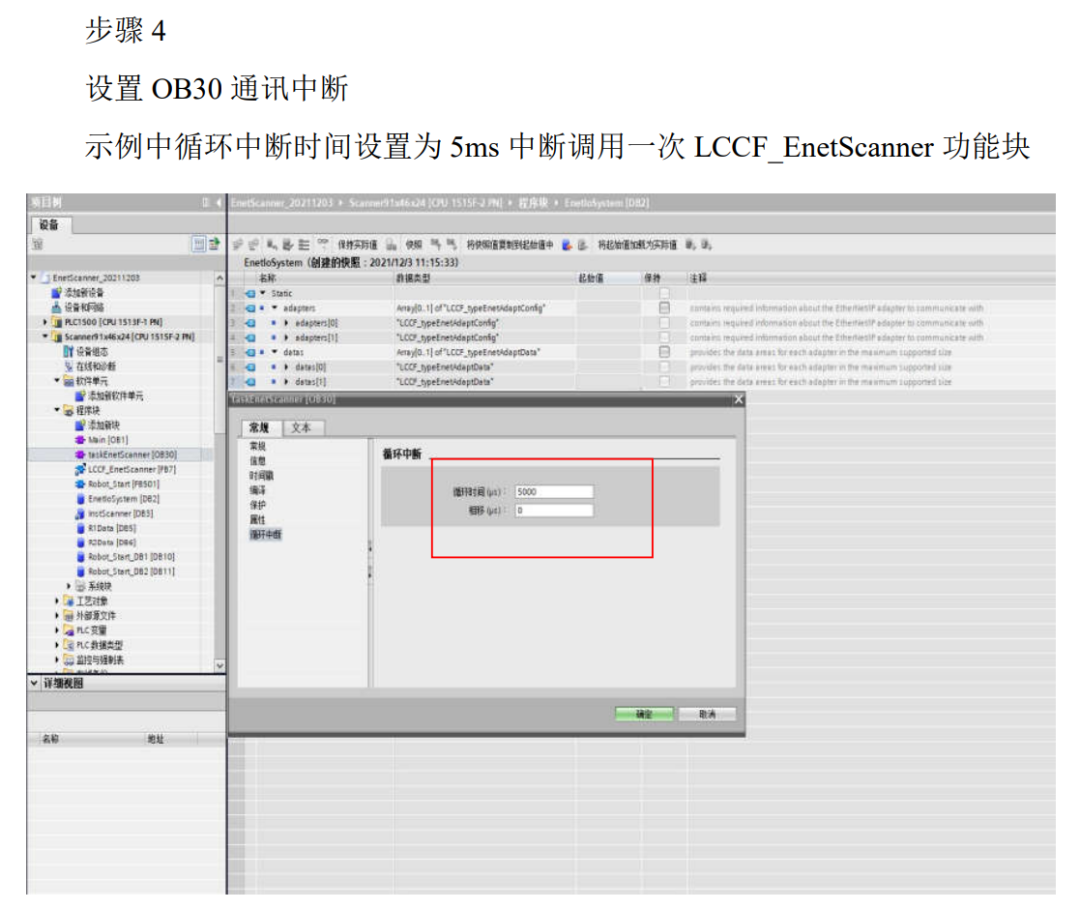
备注:循环中断的设置与适配器的数量及 RPI 设置密切相关,建议适配器的 RPI 时间设置要
5-10 倍的循环中断时间。
审核编辑:黄飞
-
Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南2026-03-24 741
-
别再为通信发愁!机床厂PROFIBUS DP转EtherNet/IP网关应用指南,低成本实现智能升级2025-06-25 647
-
颠覆智造:profinet转ethernet ip网关×发那科×西门子的三国杀2025-06-16 1060
-
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信2025-06-08 1230
-
探寻西门子PLC与川崎机器人利用 Ethernet IP 转 Profinet网关实现通讯的成功案例2025-05-28 919
-
ABB机器人与西门子PLC通讯案例2025-02-02 5015
-
西门子 PLC 与川崎机器人通讯:Profinet 转 Ethernet IP 实例解析2024-12-02 2309
-
EtherNetIP转Profinet网关连接发那科机器人配置实例解析2024-11-18 2150
-
ABB机器人与西门子PLC的Profinet通讯设置2024-06-17 13282
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 3551
-
EtherNet IP转PROFINET网关连接西门子与欧姆龙方法2023-07-02 1829
-
ABB工业机器人与西门子S-1200 PLC通信的实现2022-08-05 16758
-
ABB六轴机器人与西门子1500PLC使用手册2021-05-07 2574
-
雅马哈机器人配置方法之西门子S7-1500控制技巧分享2020-04-27 17632
全部0条评论

快来发表一下你的评论吧 !
