

机器视觉应用尺寸检测基础解析
机器视觉
描述
尺寸测量/边缘检测
利用边缘检查的尺寸检查是图像传感器的最新应用趋势。图像传感器可以将检查对象在平面上表现出来,通过边缘检测,测算位置、宽度、角度等。
下面将按照处理过程来介绍边缘检查的原理。理解原理有助于优化检查设置。除此之外,还将介绍一些有代表性的边缘检 查的例子以及可以稳定检查效果的预处理滤镜的选择方法。
边缘检测的原理
所谓边缘是指图像内明亮部位与阴暗部分的边缘。边缘检测是通过视觉系统来检测这种浓淡变化的边缘。
可以通过下列4个过程来得到边缘。
(1)投影处理
对于测量区域内的图像进行投影处理。投影处理是相对于检查方向进行垂直扫描,然后计算各投影线的平均浓度。投影线平均浓度波形被称为投影波形。
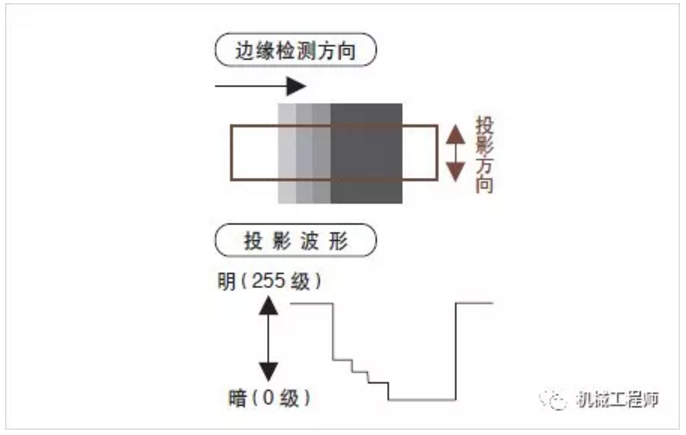
什么是投影处理?
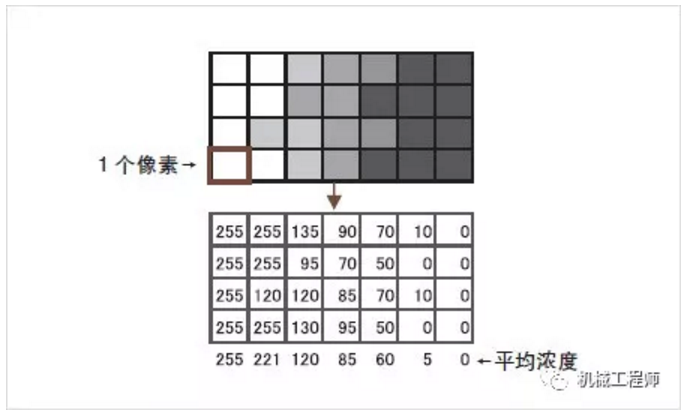
计算投影方向的平均浓度。
可以减少区域内的噪点造成的检查错误。
(2)微分处理
根据投影波形进行微分处理。可能成为边缘的、浓淡变化较大的部位,其微分值也较大。
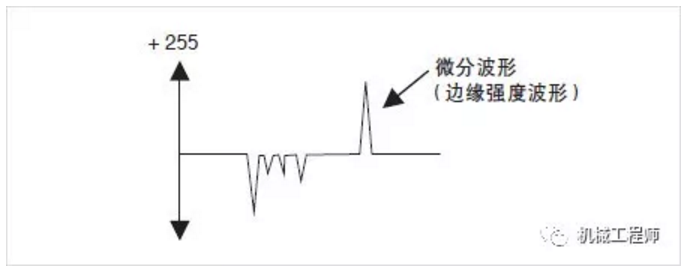
什么是微分处理?
计算浓淡(级)变化量的处理过程。
可以消除区域内浓度绝对值的变化所导致的影响。
例:没有浓淡变化的部位的微分值是0。
白色(255)→黑色(0) 时的值是-255。
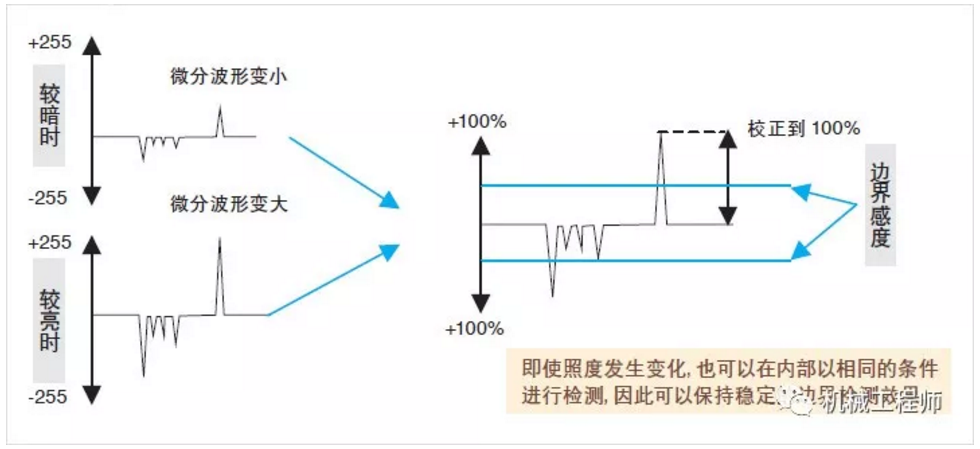
(3)通过校正使微分最大值达到100%
在实际生产线上,为了使边缘达到稳定的状态,通常会进行适当的调整以使微分绝对值达到100%。
将超过预先设置的“ 边缘感度(%)”的微分波形的峰值作为边缘位置。根据浓淡变化峰值的检测原理,在照度经常发生变化的生产线上也可以稳定的检测出边缘。
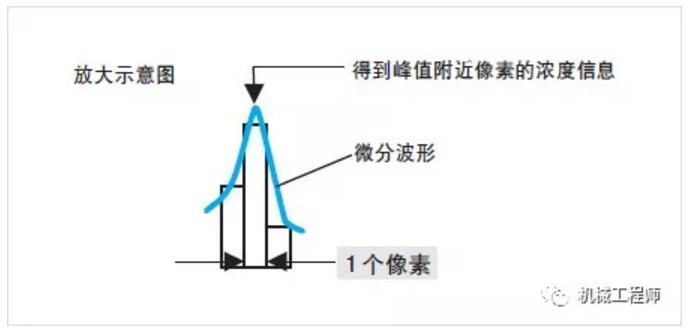
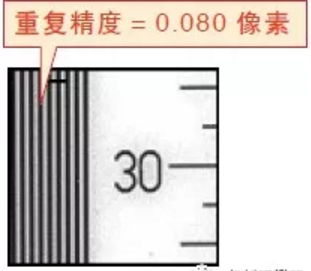
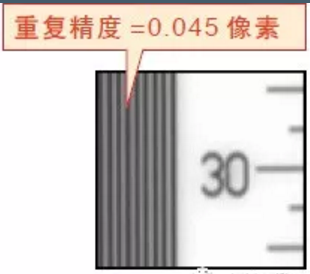
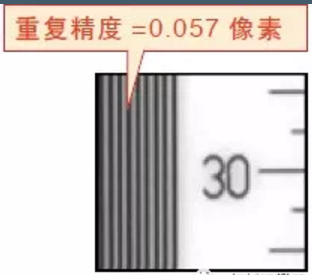
(4)亚像素处理
对于微分波形中最大部分的中心附近的3个像素,根据这3个像素形成的波形,进行修正演算。以1/100像素为单位测算边界位置(次像素处理)。
边缘检测的代表性检测应用
边缘检查具有下列衍生模式。下面将分别介绍其代表性应用。

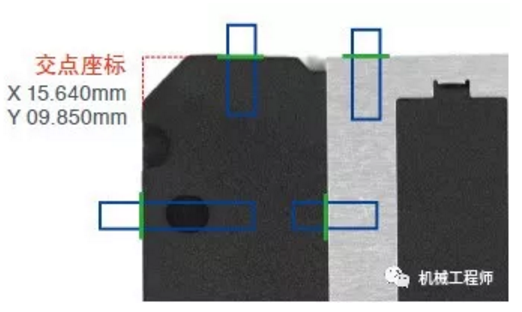
<例1>利用边缘位置的各种检查
在多个部位设置边缘位置模式,测量检测对象的X座标或Y 座标。
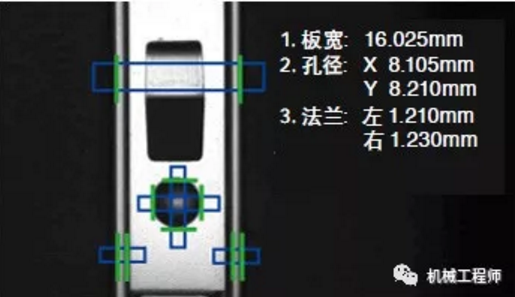
<例2>利用边缘宽度的各种检查
利用边缘宽度的“ 外部尺寸”模式,检测金属板的宽度、孔洞的X方向/Y方向孔径等。
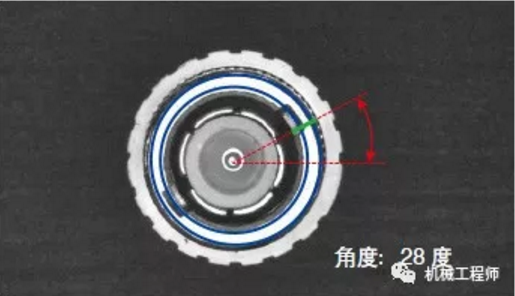
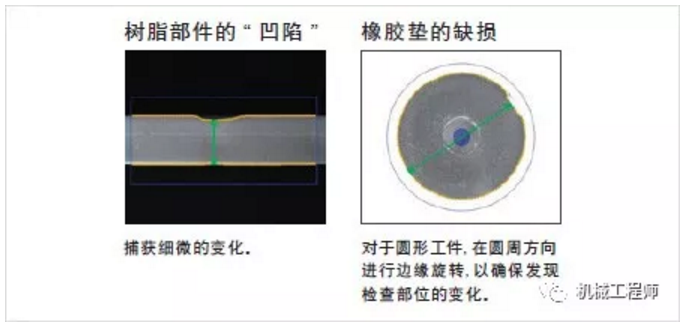
<例3>利用边缘位置圆周区域的各种检查
以圆周作为检测区域,检测切缺部位的角度(相位)。
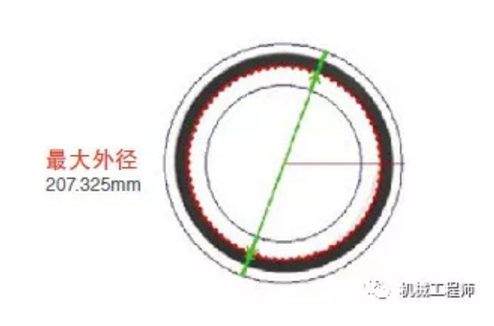
<例4>利用趋势边缘宽度的各种检查
利用“ 圆周”区域的“ 趋势边缘宽度”模式,扫描环状工件的内径、评价扁平度等。
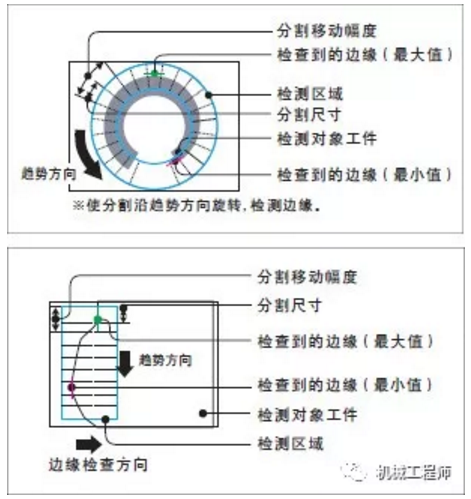
趋势边缘模式
趋势边缘位置( 宽度)模式是指在扫描检查区域内较窄的边缘窗口的同时检测边缘位置。利用这种检查模式,可以对于一个窗口内的多个点进行边缘位置( 宽度) 检查,因此可以确保捕获工件的微小变化。
检测原理
使小范围内的分割以小间距进行移动,检查各点的边缘宽度或边缘位置。
提高位置检测精度的方法:
缩小分割尺寸
缩短处理时间的方法:
缩小分割移位幅度(移动量)。
趋势方向:
分割移动的方向。
提高边缘检查效果的预处理滤镜
原图像
平均化
3×3 像素的平均滤镜。可以有效减少噪点因素的 影响。
3×3 像素的中值滤镜。可以在保持图像清晰的同 时,有效减少噪点因素的影响。
如何优化预处理滤镜?
一般说来,通过“中值化”或“平均化”,可以得到稳定的边缘检查效果。但是,对于特定的工件,究竟应该选择哪一种滤镜才可以得到最佳效果?下面将介绍对于各滤镜的测量值的偏差进行评价的统计学方法。
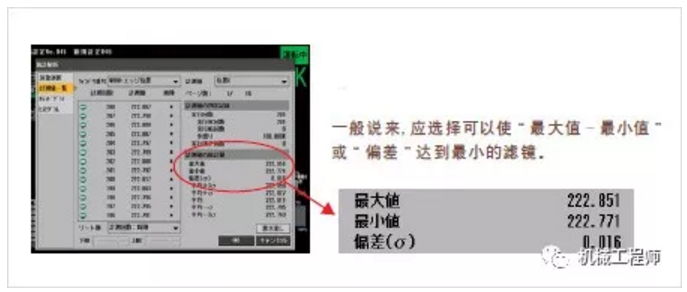
CV系列(CV2000以上)具有统计分析功能,可以保存测量数据,并对其进行统计分析。
利用这种功能,通过分别采用“无滤镜”、“中值化”、“平均化”、“中值化+平均化”、“平均化+中值化”在静止状态下重复测量,并对于各数据的统计结果进行确认,可以得到最佳的滤镜设置。
图像传感器边缘检查模式的使用要点:
在理解边缘检查原理的基础上进行有效的调整。
理解各种衍生模式,显著提高检查可能性。
参考代表性的检查例有助于工作的进行。
通过实验选择最佳的预处理滤镜,提高检查速度及检查效果。
审核编辑:黄飞
-
机器视觉的镜头选择2012-10-22 3327
-
机器视觉检测设备的优势2019-10-14 2781
-
谈谈机器视觉检测设备检测O型密封圈尺寸!2019-12-12 3206
-
机器视觉检测系统在薄膜表面缺陷检测的应用2020-10-30 2386
-
深圳机器视觉检测项目包括哪些?2020-11-11 2647
-
中山视觉尺寸检测方法和检测范围2021-07-08 1137
-
四元数数控:深圳机器视觉检测有什么应用?2021-11-02 916
-
四元数数控:深圳CCD机器视觉定位检测是什么?2021-11-26 974
-
四元数数控:深圳机器视觉尺寸检测之CCD间隙检测软件?2022-01-12 918
-
基于机器视觉的形状尺寸检测方法研究2009-12-30 935
-
机器视觉检测尺寸检测方法和应用范围2021-10-15 3653
-
机器视觉中外观尺寸测量检测2022-08-31 5019
-
机器视觉检测与机器视觉定位的区别与应用2023-05-30 2133
-
机器视觉如何检测橡胶圈外观尺寸检测?2024-03-15 1642
-
机器视觉尺寸检测技术全解析!2024-05-20 1623
全部0条评论

快来发表一下你的评论吧 !
