

单片机高效运行秘诀:实现数学函数的优化之道
描述
大家好,我是小麦,今天给大家分享一下如何在资源紧张,算力较低的单片机上实现三角函数的算法。
之前发过一篇关于IQMath的文章,这个是ti公司平台上的一个数学运算库,里面封装了很多高效的数学运算方法。
例如在不具备浮点运算器的定点处理器使用定点运算,以前写过一篇Q格式的文章,有简单介绍过这些知识。
那么问题来了,有一个读者朋友的硬件平台无法使用IQMath,但是他要进行一些三角函数的运算,那么该如何自己动手实现呢?
下面我们来简单介绍一下整体的思路吧,因为硬件平台的资源比较紧张;
RAM比较少;
ROM比较少;
CPU处理速度比较慢;
所以这里比较常用的方法就是通过空间换时间,预先将sin,cos的值存储到数组中,需要用的时候,访问数组就可以得到具体的数据。这也就是我们经常会提到的查表法。
下面我们来详细介绍一下。
正弦表
这个正弦函数表达式是这样的,
具体如下图所示;
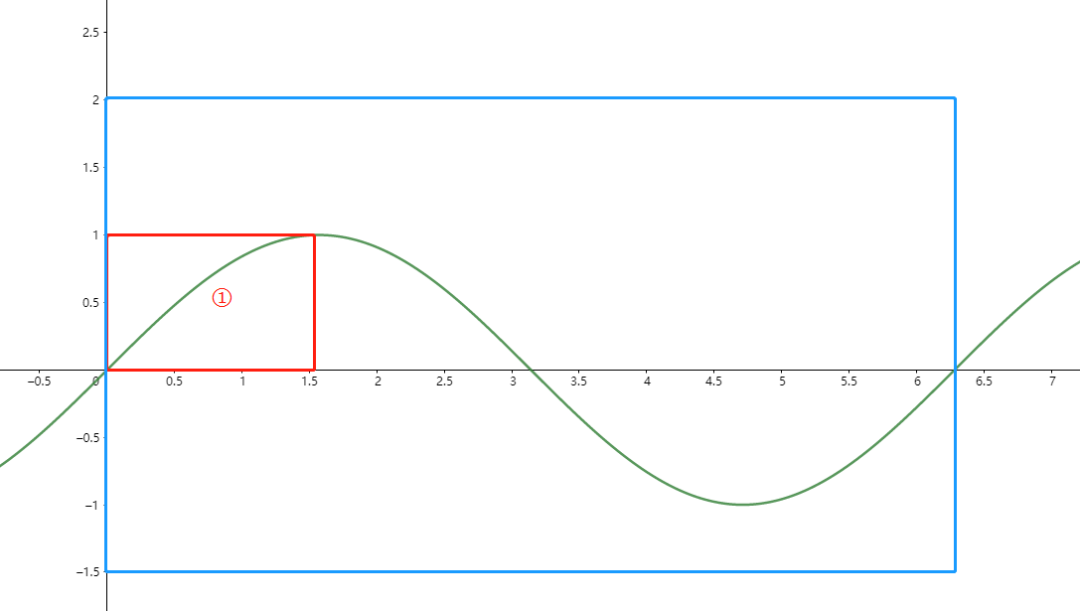
正弦波
首先我们来简单分析一下这个波形:
在蓝色框内是一整个周期的波形;
在红色框内是四分之一个周期的波形;
其实不难发现,我们只要表示出这四分之一个波形的数据,其余剩下的波形都可以通过换算表示出来。
这样做就大大节省了查表法所需要的空间。
下面我们来介绍一下具体如何实现;
首先我们得搞清楚一个点,就是量纲,统一用归一化的形式来做。
y的范围是 [-1, 1];
x的范围是[0, 2π],当然,x的范围[-π, π]也是没问题的,下面会继续介绍;
而在实际的程序中,我们是无法这样去做的,这些数值我们期望通过整形类型去访问,所以我们要做到几点:
尽量避免使用浮点运算;
尽量避免除法;
尽量避免乘法;
所以这里有必要先了解一下Q格式,用左移和右移去代替乘法和除法,提高运算效率;
对于X轴的数据,于是可以将[0, 2π]细分成 128 ,256,512或者 1024 等等;
这里我们先细分成1024等份,正如前面提到的,只需要选择前四分之一周期的内容即可;
#define POINT_NUM 256
#define PI 3.141592f
for (int i = 0; i < POINT_NUM; i++) {
printf( "[%03d:%1.4f] ", i , (sin(i*PI/2 / POINT_NUM)));
if((i+1) % 8 == 0){
printf("
");
}
}
打印的输出结果如下:
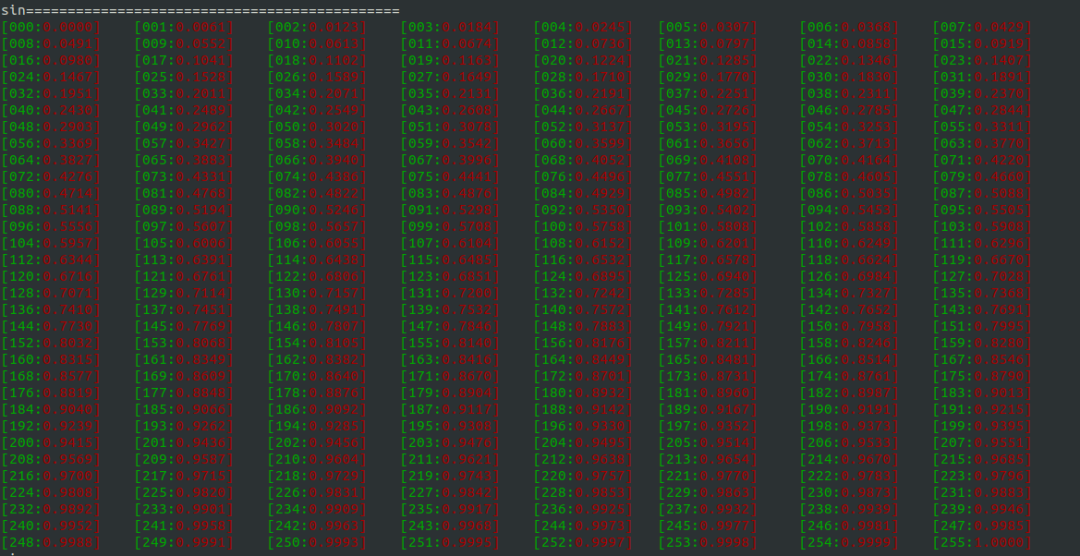
浮点类型的正弦表
这里我们可以简单取几个特殊点验证一下,发现整体还是可以接受的;
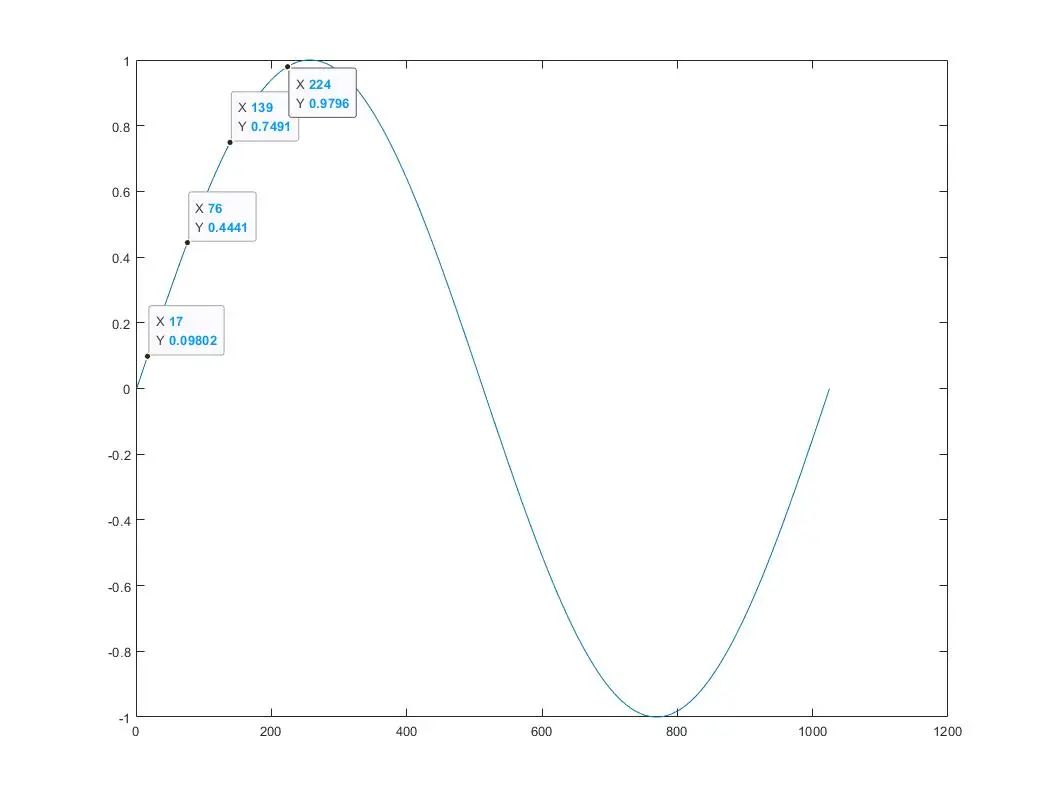
matlab输出的波形
下一步就是将浮点数据y转化为Q1.15格式哈,
#define POINT_NUM 256
#define PI 3.141592f
printf("sin=============================================
");
for (int i = 0; i < POINT_NUM; i++) {
printf("[ %d: 0x%04X ]", i, (int16_t)(sin(i*PI/2 / POINT_NUM) * 32768));
if((i+1) % 8 == 0){
printf("
");
}
}
最终输出结果如下所示;
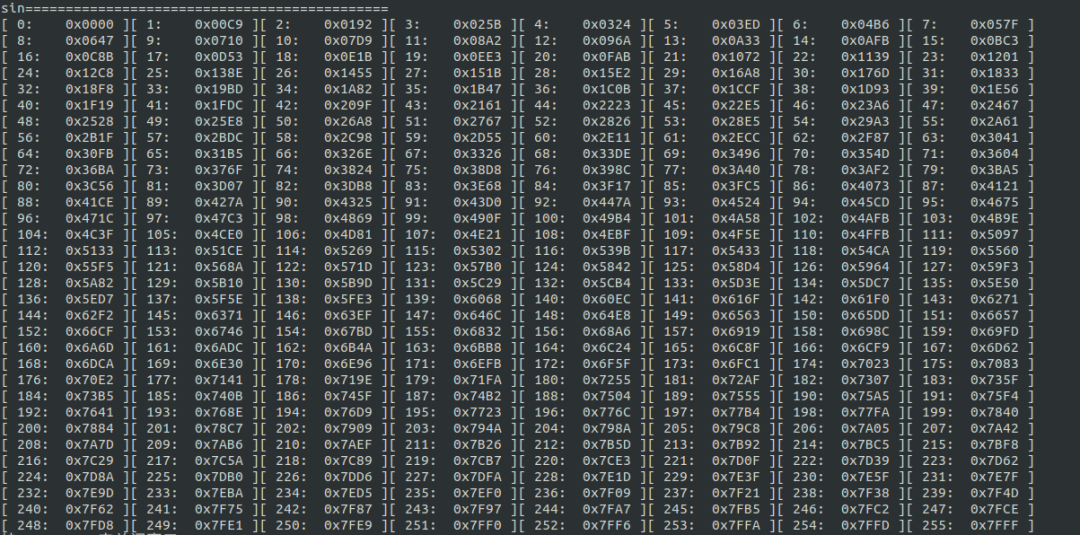
Q格式正弦表
源码部分
下面这部分代码是参考ST的mcsdk中的一个实例,下面我们会依次分析每个部分的作用,整体的代码具体如下所示;
#define SIN_COS_TABLE {
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE}
const int16_t hSin_Cos_Table[256] = SIN_COS_TABLE;
typedef struct
{
int16_t hCos;
int16_t hSin;
} Trig_Components;
/**
* @brief This function returns cosine and sine functions of the angle fed in
* input
* @param hAngle: angle in q1.15 format (-1~0.9999)
* @retval Trig_Components Cos(angle) and Sin(angle) in Trig_Components format
*/
Trig_Components trig_functions( int16_t hAngle )
{
int32_t shindex;
uint16_t uhindex;
Trig_Components Local_Components;
/* 10 bit index computation */
shindex = ( ( int32_t )32768 + ( int32_t )hAngle );
uhindex = ( uint16_t )shindex;
//uhindex /= ( uint16_t )64;
uhindex = uhindex >> 6;
/**
| hAngle | angle | std |
| (0,16384] | U0_90 | (0,0.5] |
| (16384,32767] | U90_180 | (0.5,0.99]|
| (-16384,-1] | U270_360 | (0,-0.5] |
| (-16384,-32768] | U180_270 | (-0.5,-1) |
*/
//SIN_MASK 0x0300u
switch ( ( uint16_t )( uhindex ) & SIN_MASK )
{
//0x0200u
case U0_90:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
//0x0300u
case U90_180:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( uhindex )];
break;
//0x0000u
case U180_270:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
//0x0100u
case U270_360:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( uhindex )];
break;
default:
break;
}
return ( Local_Components );
}
由于输入的hAngle是Q1.15格式,所以这里可以简单画个图;下面是角度hAngle从0x0000~0xFFFF的示意图,如下所示;
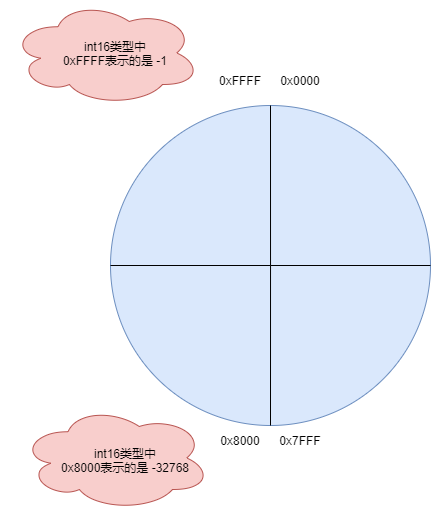
角度值
这里注意,负数是以补码形式进行保存的,正数的补码等于他本身;
负数的补码是除了符号位外,其他位取反,然后加上1;
所以可以算一下 0xFFFF表示-1;
0x8000表示 -32768;
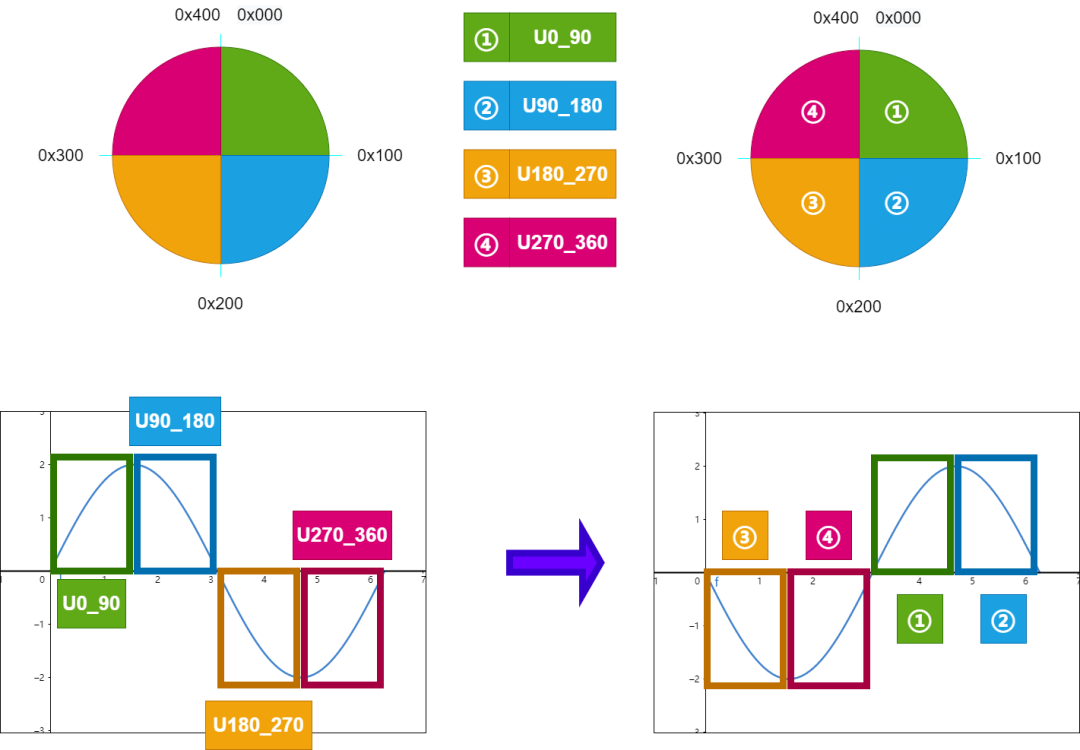
因为Q格式中有无符号的范围和带符号的范围,所以这里的hAngle充分利用这个16 bit的数据,并且兼容了传入参数可以是有符号int16或者是无符号uint16,这里比较绕,先看下面这张图片;
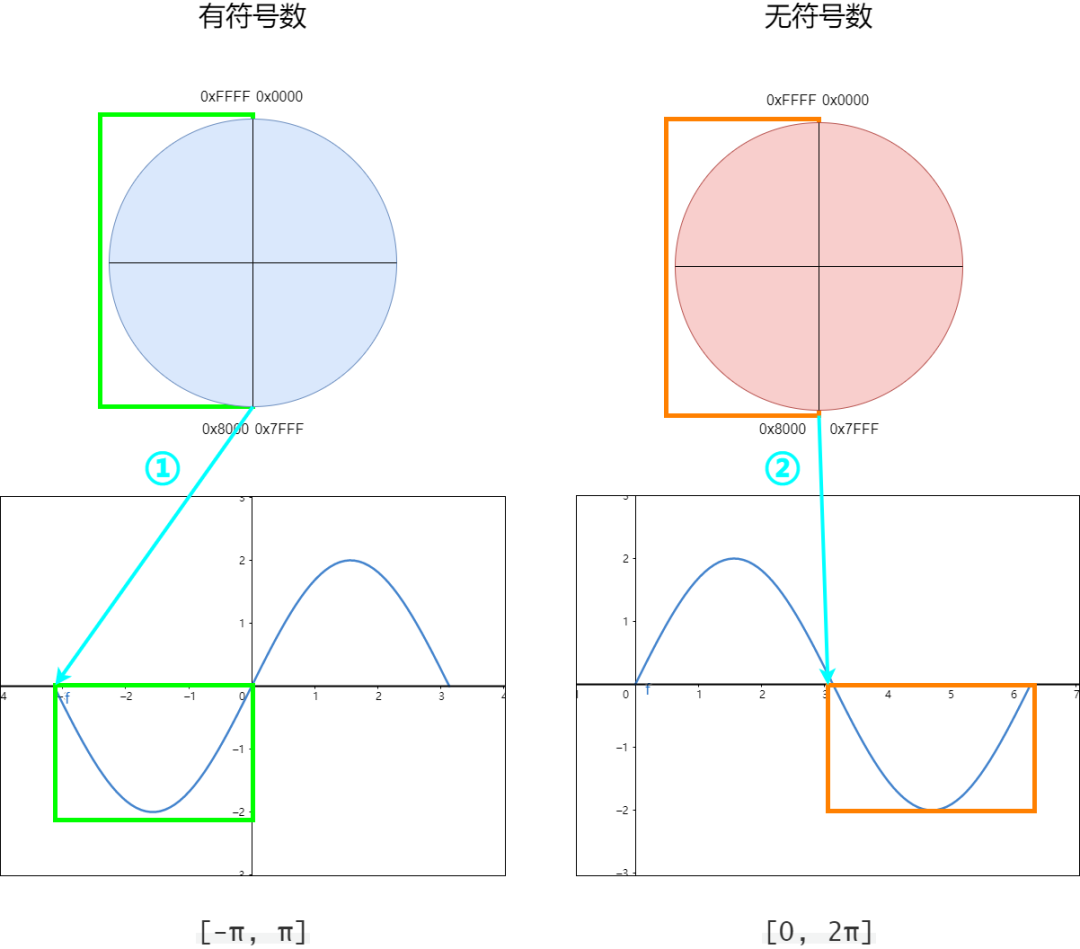
有符号和无符号 对比
上图中;
左边是有符号int16,右边是无符号数uint16;
两个圆形分别表示int16和uint16的数值范围;
左边绿色框内的波形相对应,橙色框内的波形相对应;
这里有几点我们要注意一下,无论是有符号和无符号,他们的周期都是相同的;
有符号整数 int16 :-32768 ~ 32765 ,
无符号整数 uint16 :0 ~ 65535,
所以这两者都使用 65536个数来表示正弦的一个周期,也就是 2π。
这里是比较关键的地方,因此对于 0x8000 这个关键点,有符号和无符号所表示的数值是不同的;
有符号整数 int16 :0x8000 表示为 -32768;
无符号整数 uint16 :0x8000 表示为 32768;
因此这他们刚好相差了一个周期 65536,所以表示的正弦数值y是相同的,正如上图中蓝色箭头①和②所示。
内部实现
由于有符号整数 int16 的最高位是符号位,所以这里我们先把它转化成无符号整形;
前面用 int32类型是为了防止数据溢出,这里加上32768,相当于对正弦波平移了半个周期,所以在下面y和x的映射关系需要根据实际情况来修改;
/* 10 bit index computation */ shindex = ( ( int32_t )32768 + ( int32_t )hAngle ); uhindex = ( uint16_t )shindex; //uhindex /= ( uint16_t )64; uhindex = uhindex >> 6;
因为前面提高过正弦表的四分之一是256个数据,所以整个正弦周期应该是 1024 个细分数据,那也就是2的10次,就需要 10 bit;
10 bit的数据范围是 0~1023;
16 bit的数据范围是 0~65535;
为了获取有效的高10 bit数据,对数据右移 6 bit,具体如下所示;
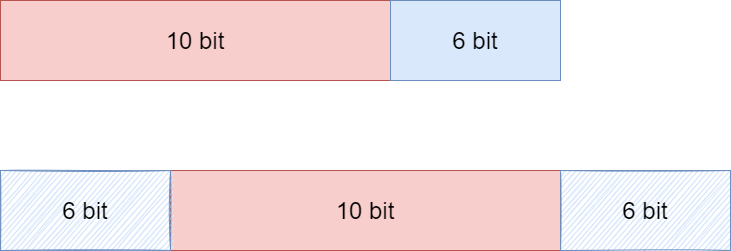
所以,我们又可以得到以下这个数据的范围 0 ~ 1023 ,0 ~ 0x400
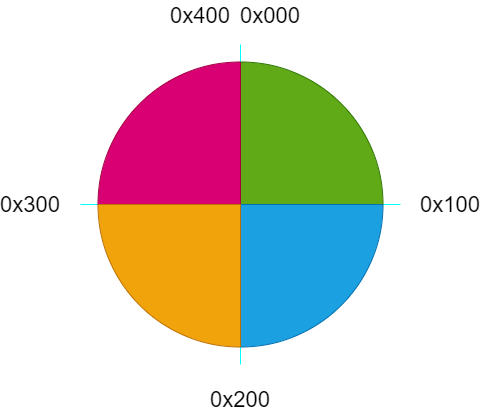
因此我们在程序中引入四个掩码,作为正弦波形落在哪个象限的标识位,这样也避免了使用除法运算,提高了效率,具体如下所示;
#define SIN_MASK 0x0300u #define U0_90 0x0200u #define U90_180 0x0300u #define U180_270 0x0000u #define U270_360 0x0100u
其中,U0_90表示 0° ~ 90°,以此类推;
那为什么是这个映射关系呢?
0~90°不应该是从 0x000u~0x100u吗?这里我们再简单解释一下;
前面有一个这样的操作,具体如下;
shindex = ( ( int32_t )32768 + ( int32_t )hAngle ); uhindex = ( uint16_t )shindex;
这里的hAngle加上32768,相当于加了一个π,正弦波形向左移动了半个周期;因此整体的映射关系要和原始的数据对应起来,具体如下所示;
最后,既然我们已经知道波形在哪个象限了,就可以根据当前象限和我们正弦表的关系来得到新的波形,这里有中心对称,关于y轴对称,简单做一下变换就可以得到正弦值和余弦值;
//SIN_MASK 0x0300u
switch ( ( uint16_t )( uhindex ) & SIN_MASK )
{
//0x0200u
case U0_90:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
//0x0300u
case U90_180:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( uhindex )];
break;
//0x0000u
case U180_270:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
//0x0100u
case U270_360:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( uhindex )];
break;
default:
break;
}
总结
本文简单介绍了正余弦函数的实现,参考了ST的mcsdk中算法,做了简单的分析,其中需要了解一部分Q格式进行定点运算的知识,本文可能存在错误和纰漏,请大家指出。如果大家有更好的方法,欢迎在下方讨论。
审核编辑:黄飞
-
单片机的数学基础2009-09-26 915
-
【论文】单片机函数信号发生器设计2016-12-11 1134
-
浅析单片机C语言函数之中断函数2018-07-18 12499
-
使用单片机实现文件系统的函数免费下载2019-08-19 988
-
如何使用单片机系统重写printf函数2019-07-23 1348
-
单片机的中断程序如何运行2020-01-27 12612
-
手动实现51单片机函数切换2021-11-11 729
-
51单片机控制42步进电机——程序实现(中断PWM/延时函数)2021-11-17 2254
-
华大单片机HC32L136+RTT踩坑(官方延时函数)2021-11-23 1616
-
单片机 keil调试的时候进入不了main函数2021-12-03 1347
-
单片机里的程序是如何运行?2023-02-17 6808
-
如何在单片机中使用malloc函数2023-04-24 3722
-
单片机用按钮中断函数2023-09-01 3398
-
单片机main函数结束干嘛去了?2023-10-18 1684
-
如何优化单片机项目的功耗2024-11-01 2351
全部0条评论

快来发表一下你的评论吧 !
