

分布式无人机蜂群的工作原理
军用/航空电子
描述
分布式无人机蜂群是一种创新的飞行系统,通过将多个无人机协同操作和通信,实现高效的任务执行和信息收集。这一技术的出现,将为各行各业带来巨大的潜力和变革。
定义
分布式无人机蜂群是指由多个无人机组成的集群,这些无人机之间通过通信和协同操作实现集体行动。与传统的单一无人机相比,蜂群更具灵活性和鲁棒性,能够完成更复杂的任务。
工作原理
1. 通信与协同:蜂群中的无人机通过无线通信协议相互连接,实现实时信息交流和指令传递。它们可以共享任务目标、位置信息和传感器数据,以便更好地协同工作。
2. 分布式控制:每个无人机都具有自主导航和控制能力,能够根据任务需求自主决策。分布式控制系统确保每个无人机根据整体目标进行个体行动,并避免碰撞和冲突。
3. 自组织与自适应:蜂群中的无人机能够根据环境变化和任务需求自主调整和重新配置。它们可以动态地分配任务、调整队形和进行故障恢复,以适应不同的情况。
应用领域
1. 侦察与监视:分布式无人机蜂群可以在军事和安全领域进行广泛的侦察和监视任务。它们能够高效地搜索、追踪和监测目标,提供实时情报和图像数据。
2. 灾害响应与救援:蜂群无人机可以在灾害现场进行搜救、勘测和救援任务。它们能够快速覆盖大范围,提供灾情评估和救援指导,帮助提高响应速度和救援效率。
3. 物流与运输:分布式无人机蜂群在物流和运输领域具有潜力。它们可以组成无人机送货队伍,实现货物的快速、高效和自动化配送,减少人力和时间成本。
4. 农业与环境监测:蜂群无人机可以在农业和环境监测中发挥重要作用。它们能够进行作物监测、土壤分析和病虫害预警,帮助农民和环保部门做出更科学的决策。
蜂群软件架构
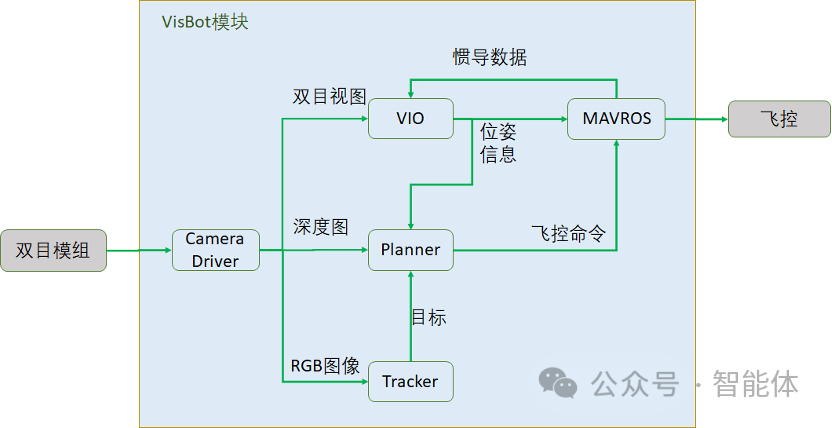
软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。猫头鹰mini2单机系统基于Visbot视觉模块的软硬件,Visbot模块负责提供飞行前进方向的深度图,同时基于Vins-fusion的双目定位算法提供飞机的姿态定位信息。
如果是单机系统,类似于ego-planner的避障导航软件就可以指导飞机完成避障环境下的轨迹规划,结合我们提供的控制软件就可以进行目标飞行。但是如果在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。
我们适配了ego-planner-swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合我们提供的控制软件就可以同步控制集群进行目标飞行。
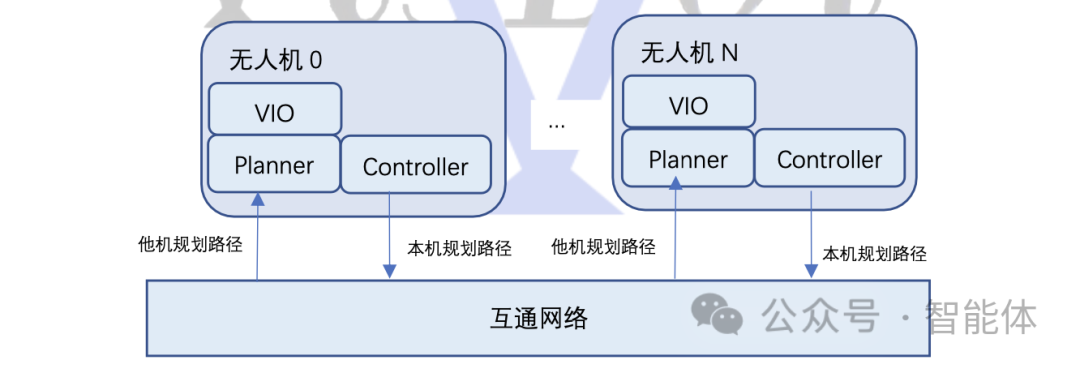
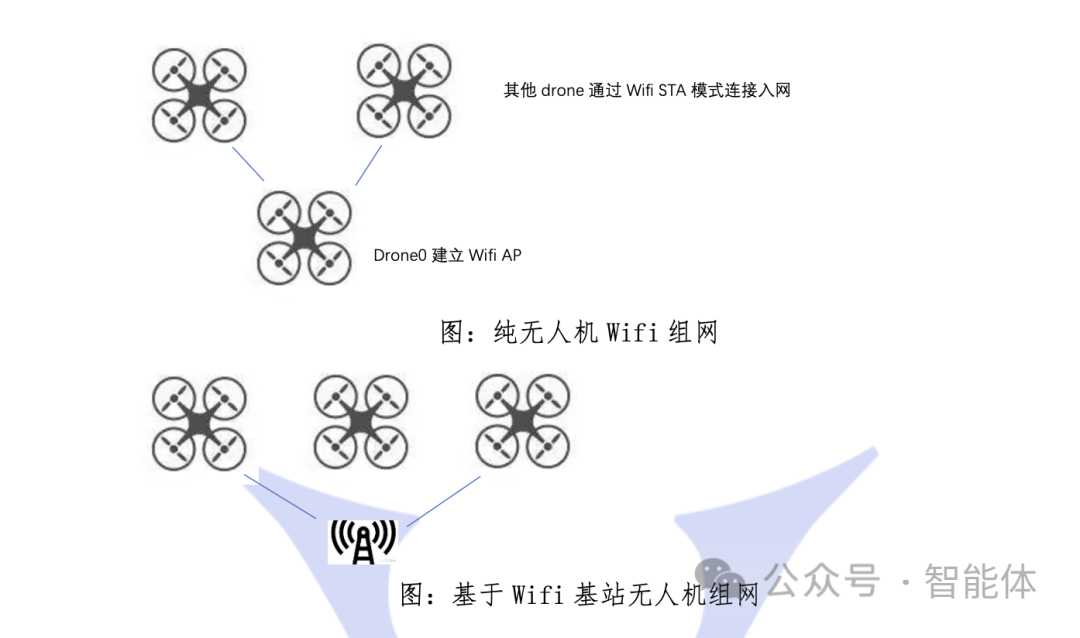
在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的ego-planner-swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。我们Visbot视觉模块提供了Wifi接口,它可以接入大功率Wifi基站,优势是可以较长距离通讯;也可以配置成自组网模式(ROS Master配置成Wi-Fi AP), 省去Wifi基站,可以满足小范围的机群需求。
结语
分布式无人机蜂群是飞行技术领域的一次革命性突破,它将为各行各业带来许多新的机会和挑战。随着技术的不断进步,我们可以期待蜂群无人机在更多领域的广泛应用,为人类创造更加智能、高效和可持续的未来。
审核编辑:黄飞
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 4727
-
无人机中的MCU是如何工作的?2018-10-09 2749
-
山东无人机反制设备保障信息不被泄漏2020-08-12 1114
-
无人机的工作原理2021-01-13 5596
-
无人机中MCU的工作过程2022-02-08 1223
-
匈牙利科学家首次实现无人机蜂群自主飞行2018-08-02 3398
-
爱立信分布式云的联网无人机解决方案助力运营商充分挖掘5G的商业潜能2018-11-14 1662
-
无人机蜂群离我们还远吗2019-06-05 2283
-
低空无人机预警管控系统采用分布式网络技术提高指挥管控效率2020-10-09 2262
-
蜂群无人机将在哪些领域获得应用?2020-10-15 4957
-
康奈尔大学蜂群无人机在编队飞行时动态可避开障碍物2020-12-21 3295
-
英国防部积极推进无人机蜂群技术研究,提升无人机蜂群作战能力2020-12-29 3543
-
基于实体行为网络交互的无人机蜂群对海作战研究2023-01-09 2338
-
美俄反无人机蜂群技术的原理2023-05-18 3643
-
解密无人机“蜂群”和“狼群战术”是什么2023-06-01 3571
全部0条评论

快来发表一下你的评论吧 !
