

技术帖 | AM62x处理器SPI的详解与应用
描述
SPI(Serial Peripheral Interface)通信总线以其高速、全双工、同步的特性而被广泛应用,它只需要四根线就能实现数据传输,有效地节约了芯片管脚的数量,同时为PCB布局带来了空间上的优化和便捷。正因为它简单易用的特点,现在越来越多的芯片选择集成SPI通信协议。
作为TI Sitara™产品线新一代MPU产品,TI AM62x处理器特别配备了多达4路的SPI接口以及1路OSPI接口(有时也称为QSPI),丰富的SPI接口配置使得该处理器能够同时与多个设备进行通信连接,大大提高了系统的扩展性和灵活性。
在飞凌嵌入式推出的搭载了AM62x处理器的OK6254-C开发板上,NOR Flash存储器正是通过连接到处理器的OSPI总线上进行工作的。这样的设计充分利用了SPI通信协议的高速传输和全双工特性,保证了开发板在数据处理和存储方面的效率。本文就通过OK6254-C开发板为大家介绍一下AM62x的SPI。

1、SPI的工作流程和时序
我们首先需要了解一下SPI是如何工作的——通常SPI通过4个引脚与外部器件相连:
(1) MISO:主设备输入/从设备输出引脚
该引脚在从模式下发送数据,在主模式下接收数据;
(2) MOSI:主设备输出/从设备输入引脚
该引脚在主模式下发送数据,在从模式下接收数据;
(3) CLK:串口时钟
作为主设备的输出,从设备的输入;
(4) NSS:从设备选择
这是一个可选的引脚,用来选择从设备。
SPI的工作流程是这样的:
(1) 主机先将NSS信号拉低,这样保证开始接收数据;
(2) 当接收端检测到时钟的边沿信号时,将立即读取数据线上的信号,这样就得到了一位数据;
(3) 由于时钟是随数据一起发送的,因此指定数据的传输速度并不重要,尽管设备将具有可以运行的最高速度;
(4) 主机发送到从机时,主机产生相应的时钟信号,然后数据一位一位地将从MOSI信号线上进行发送到从机;
(5) 主机接收从机数据时,如果从机需要将数据发送回主机,则主机将继续生成预定数量的时钟信号,并且从机会将数据通过MISO信号线发送。
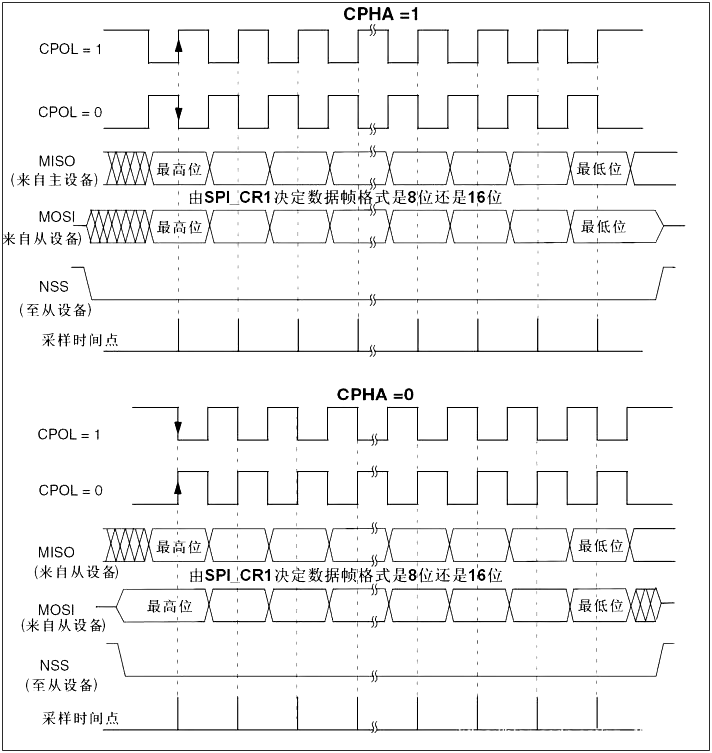
SPI工作时序图如下:
2、AM62x处理器中SPI总线的特点
在AM62x这款芯片中,TI将SPI的MISO与MOSI设计为d0和d1,具体哪一个作为输入,哪一个作为输出,是由设备树中的 ti,pindir-d0-out-d1-in= <1>来设置的。
默认属性值为0,即d0是输入,d1是输出;
当属性值为1时,d0为输出,d1为输入。
3、AM62x的SPI应用
(1)menuconfig配置:
将该项选中,SPI驱动将编译进内核中。
makemenuconfi
DeviceDrivers ->
SPIsupport ->
Usermode SPI device driver support
(注:在飞凌嵌入式OK6254-C开发板中,SPI驱动编译已进去。)
(2)设备树配置:
1) 选择需要使用的spi,这里我们用spi0,节点为&main_spi0;
2) 将该节点所用的引脚复用为相应的功能。
spi0_pins_default: spi0-pins-default { pinctrl-single,pins = < AM62X_IOPAD(0x1B4, PIN_OUTPUT, 0) /* (A13) SPI0_CS0 */ AM62X_IOPAD(0x1B8, PIN_OUTPUT, 0) /* (C13) SPI0_CS1 */ AM62X_IOPAD(0x1C0, PIN_INPUT, 0) /* (B13) SPI0_D0 */ AM62X_IOPAD(0x1BC, PIN_OUTPUT, 0) /* (A14) SPI0_CLK */ AM62X_IOPAD(0x1C4, PIN_INPUT, 0) /* (B14) SPI0_D1 */ >; };
3) 描述节点的属性,具体配置项的功能见注释。
&main_spi0 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&spi0_pins_default>; /* 描述引脚复用节点 */ ti,spi-num-cs = <2>; /* 描述片选的数量 */ ti,pindir-d0-out-d1-in = <1>; /* 描述输入输出分别是哪个 */ /* 描述子节点spidev0设备 */ spidev@0 { spi-max-frequency = <24000000>; /* 描述spidev0设备的最大频率 */ reg = <0>; /* 描述spidev0设备所用的片选,这里是第0个 */ spi-cs-high; /* 描述spidev0设备高有效 */ compatible = "rohm,dh2228fv"; /* 描述spidev0设备所用驱动 */ }; /* 描述子节点spidev1设备 */ spidev@1 { spi-max-frequency = <24000000>; reg = <1>; compatible = "rohm,dh2228fv"; }; };
(3)编译烧录:
在源码路径下输入以下命令:
. build.sh
sudo ./build.sh kernel
没有报错即为编译成功。
将源码路径下的image中的OK6254-C.dtb文件放到开发板的/boot目录中,重启开发板即可。
(4)SPI测试:
将spi0_D0和spi0_D1短接
重启开发板后,在/dev目录下看到多出两个spidev设备。
使用我们的测试程序
fltest_spidev_test -D /dev/spidev3.0 -s 42000
有如下打印信息即为成功:
spimode: 0
bitsper word: 8
maxspeed: 42000 Hz (42 KHz)
FFFF FF FF FF FF
4000 00 00 00 95
FFFF FF FF FF FF
FFFF FF FF FF FF
FFFF FF FF FF FF
DEAD BE EF BA AD
F00D
4、总结
TI AM62x处理器有着丰富的SPI资源,而SPI又可以作为许多设备的总线,这使得AM62x能够接入许多SPI接口的设备,因此在那些对SPI有着比较多需求的应用场景下,TI AM62x无疑是一个非常好的主控选择。
-
基于TI AM62x的SPI接口配置2024-03-22 2094
-
TI AM62x处理器的SPI总线怎么用2022-10-31 7250
-
AM62x相比AM335x,到底升级了什么?2023-05-03 1020
-
搭载TI AM62x处理器,飞凌FET6254-C核心板震撼发布2022-06-24 2772
-
AM62x的SPI总线怎么用?让我告诉你2022-10-28 2173
-
TI AM62x接替AM335x,米尔核心板开发板2023-08-08 2635
-
AM62x基于GPMC的ARM+FPGA通信方案2023-09-25 2484
-
米尔AM62x核心板,高配价低,AM335x升级首选2023-11-20 1758
-
没抢到?米尔AM62x开发板限量5折又来了2024-05-17 1822
-
GPMC并口多通道AD采集案例,基于TI AM62x四核处理器平台!2024-07-09 1816
-
AM62x Sitara™处理器数据表2024-08-03 926
-
使用SPI将MSPM0–ADC连接到AM62x上2024-08-30 690
-
AM62x延长开机时间应用说明2024-09-13 573
-
AM62x低功耗SK EVM用户指南2024-11-12 797
-
德州仪器AM62x Sitara™处理器技术解析2025-09-03 2359
全部0条评论

快来发表一下你的评论吧 !
