

利用应变传感器阵列实现复杂的人体运动捕捉
描述
基于柔性传感器的运动捕捉技术在个性化医疗、人机交互、虚拟现实(VR)/增强现实(AR)等诸多领域中展现出巨大的发展潜力。目前,利用柔性力传感器实现运动捕捉的方式主要采用单个传感器与单个关节/肌肉之间的一对一多节点捕获策略。
然而,人体包括超过360个关节和300块肌肉,这就需要不切实际的传感器单元数量来实现全身运动捕捉,从而导致系统成本增加和过度的皮肤覆盖。此外,整合大量传感器单元需要持续增加互连导线的密度和精细度,这将导致更高的整体阻抗和噪声水平,为大范围内保持高空间分辨率带来挑战。
据麦姆斯咨询报道,近日,吉林大学电子科学与工程学院张彤教授研究团队,设计了一种由三个应变传感器单元组成的应变传感器阵列。通过利用不同应变状态下每个单元的响应趋势和响应值的差异作为判断依据,首次实现对应变轴水平角度的判别,以及对复杂应变模式中信息的解耦和准确提取,从而更有效地获取由复杂应力引起的表面形变。
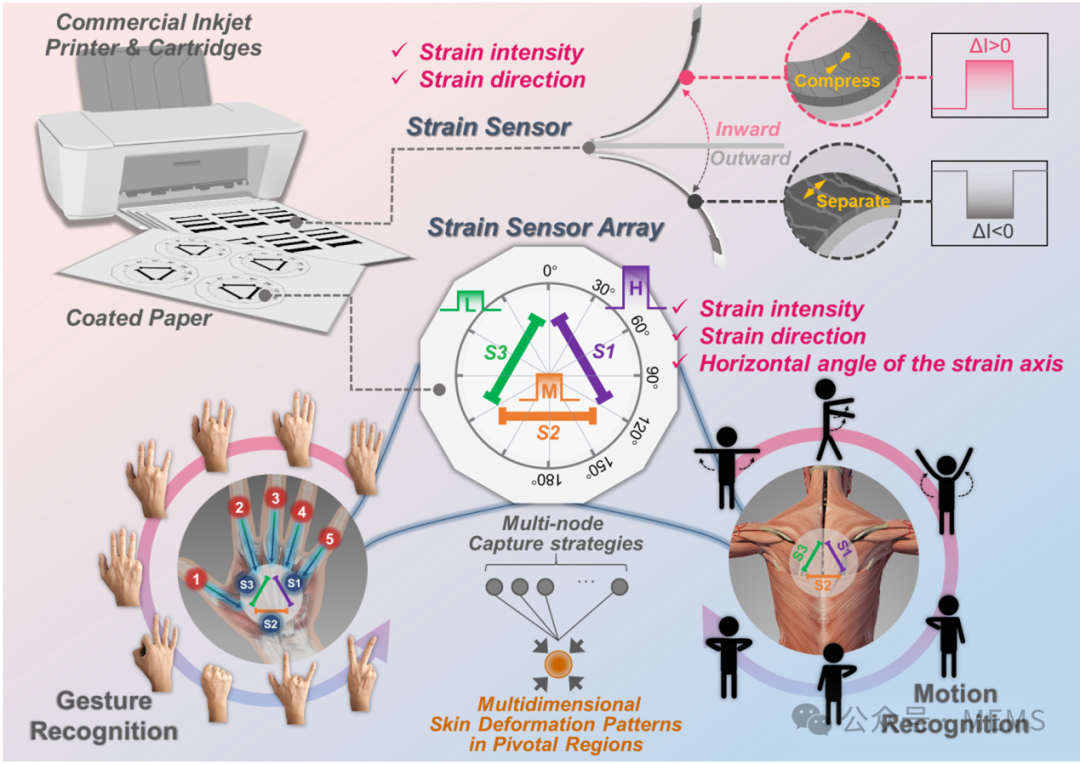
图1 喷墨打印的纸基应变传感器单元和阵列的构筑流程、敏感机理及应用示意图
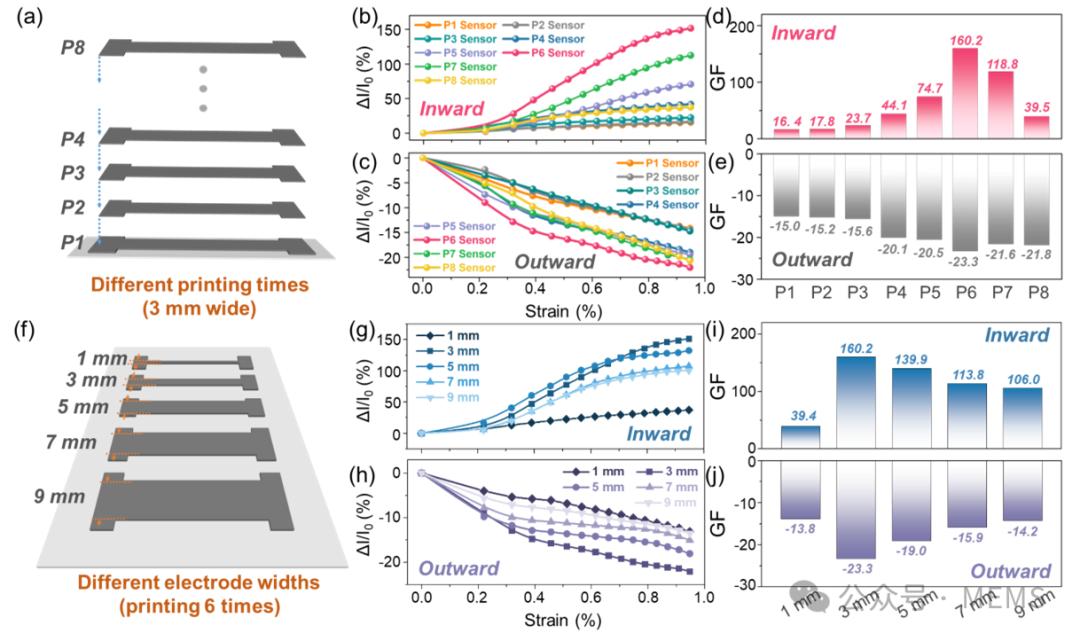
图2 分别讨论印刷次数、敏感区域尺寸、纸张衬底厚度对传感器敏感性能的影响,从中选出最佳的构筑方案
该工作利用商用喷墨打印机及原装墨盒在相纸上实现应变传感器及阵列的批量构筑。喷墨打印墨水的主要成分为碳黑,通过打印过程在相纸表面涂层中形成图案化的导电层,并经过反复弯曲在碳黑层中构建微裂纹。该微裂纹结构不仅为应变传感器提供了高灵敏度,同时,可通过不同应变方向引起微裂纹的分离和压缩导致电阻的相反变化趋势实现对异向应变的解耦。
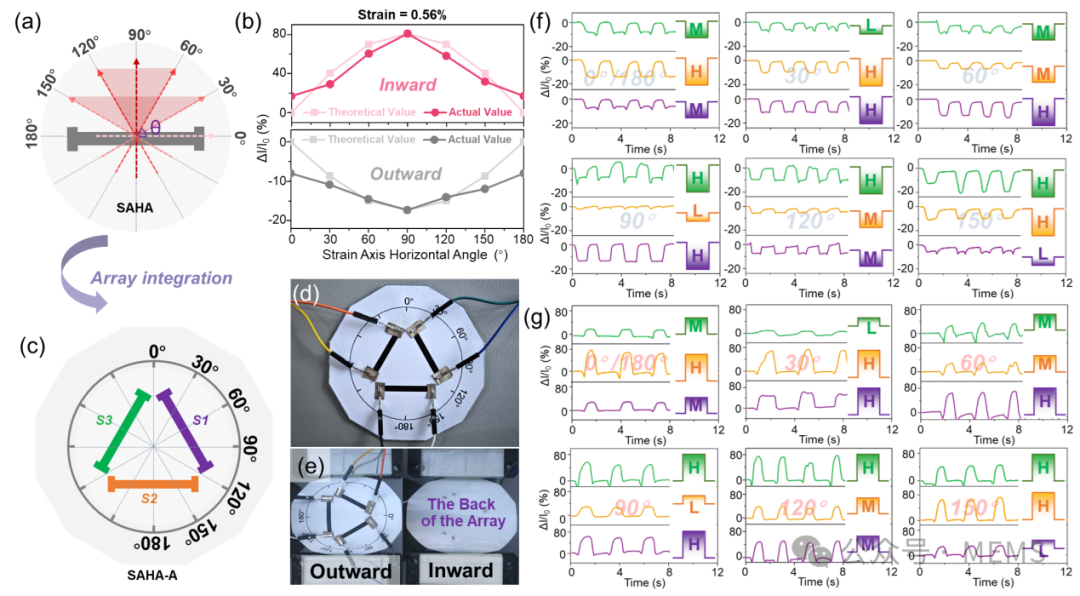
图3 应变传感器单元及阵列对不同应变轴水平角度的响应性能分析
该应变传感器阵列由三个互成60°的传感器单元组成。由于三个应变传感器单元在平面中具有不同的水平角度,当阵列以任何应变轴水平角度弯曲时,阵列中的每个应变传感器单元的应变轴角度均不相同,进而引起三个应变传感器单元响应幅值和趋势的显著差异。因此,可以通过分析三个器件的响应特征来识别阵列所在平面的应变轴水平角度,同时该阵列还表现出对不同弯曲方向的辨别能力。
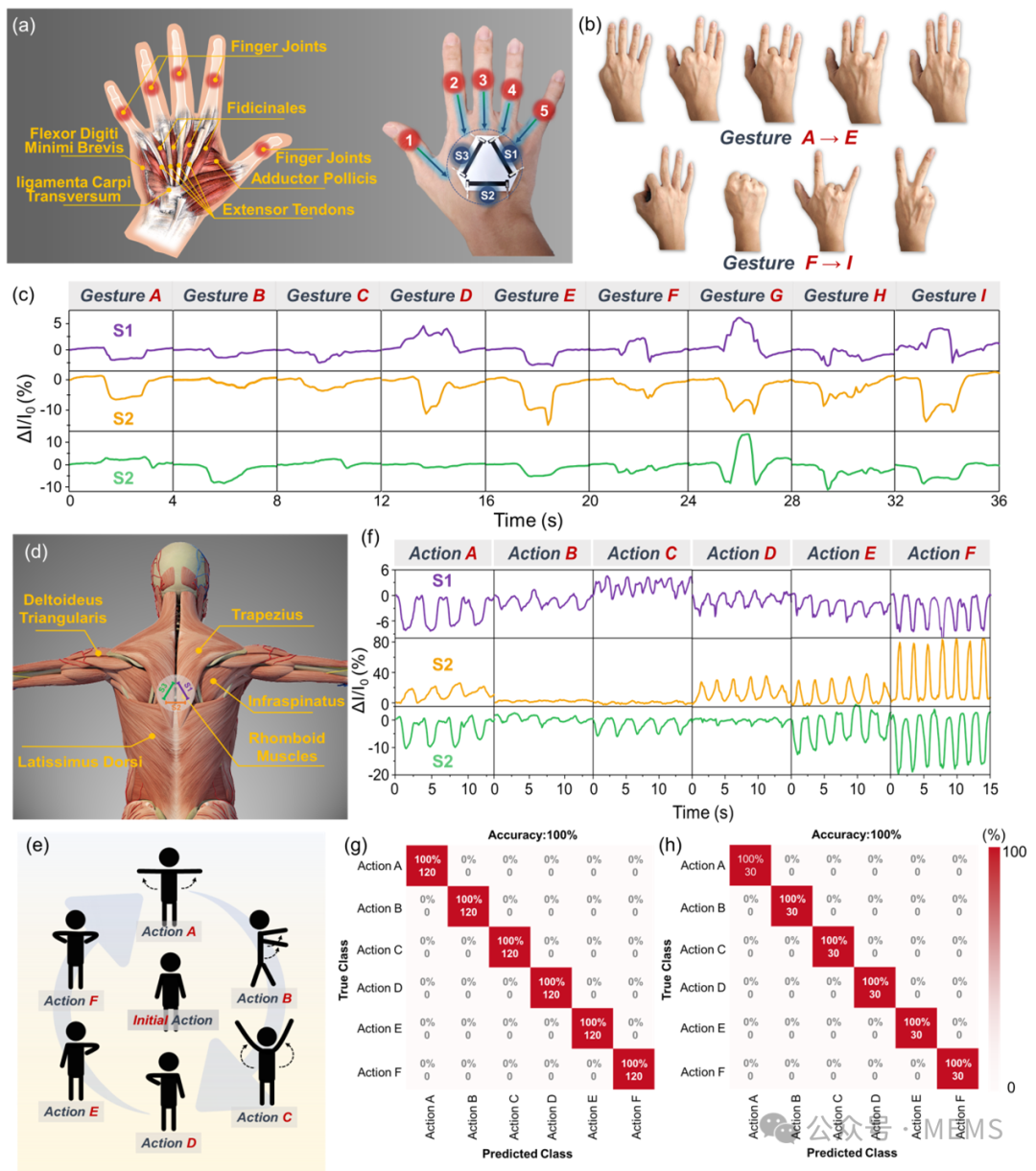
图4 应变传感器阵列在手势识别和运动跟踪中的应用
本工作进一步探索了应变传感器阵列在监测人类运动过程中多个关节和肌肉群引起的复杂应变模式中的应用。在已报道的工作中,大量研究集中在利用柔性力传感器进行手势识别,特别是在手语识别和语言障碍患者的通信设备以及人机交互的背景下。这些研究均基于传感器对手指关节运动的一对一监测方式,这就需要至少五个传感器单元来获取所需的信息。研究人员发现,每个手势都是通过手指关节和手背区域的肌肉和肌腱协调运动实现的,不同手指的弯曲和伸展过程伴随着手背相应肌肉和肌腱的协调运动。因此,本工作突破了传统的手势识别方法,将重点从监测手指关节运动转移到监测由手背区域的肌腱和肌肉形成的复杂表面的应变模式。不同手势时肌肉和肌腱的收缩和放松引起的皮肤应变变化会导致三个传感器单元具有出不同的响应趋势和幅度。
同理,在上肢运动过程中,肩部、手臂和背部肌肉群的协调运动驱动肩关节、颈椎和胸椎的运动,进而导致背部表面曲率的变化,不同动作将伴随菱形肌形变方式和强度的差异。通过监测菱形肌的形变和运动方式,可实现对上肢运动行为的分辨和追踪。结合机器学习算法,利用应变传感器阵列检测运动中枢区域皮肤的形变模式,在手势识别和上肢运动姿态识别方面表现出高准确度,为复杂的人体运动捕捉应用提供了新的可行方案。
上述研究工作以“Less is more: Enabling complex human motion capture with a printed low-pixel strain sensor array”为题在国际著名期刊Nano Energy上发表。吉林大学电子科学与工程学院林修竹博士后为第一作者,通讯作者为张彤教授和赵红然副教授。上述工作是该团队近期关于可穿戴柔性传感器的最新进展之一。吉林大学微纳传感材料与器件实验室(SMDLAB)长期致力于面向工业生产安全、环境污染、人体健康以及家居环境等领域的气体、湿度、压力、温度、生物分子等传感检测,开展微纳米传感材料的设计和制备、传感器的结构设计以及应用开发。相关成果还发表在ACS Nano、Advanced Functional Materials、Nano-Micro Letters、Biosensors & Bioelectronics、Journal of Hazardous Material、ACS Sensors、Small、Small Methods、Sensors and Actuators B: Chemical、ACS Applied Materials & Interfacs、IEEE Electron Device Letters等期刊上。
课题组网站链接:
http://smdlab.jlu.edu.cn/index.htm
原文链接:
https://doi.org/10.1016/j.nanoen.2024.109350
审核编辑:刘清
-
关于人体红外阵列传感器的使用2017-03-23 8588
-
如何去实现一种基于传感器的人体生命体征监控技术呢2021-10-26 2215
-
stm32的人体红外传感器怎么使用?2021-11-26 2217
-
新型使用光学应变传感器2009-06-30 440
-
基于视频的人体运动捕捉综述2011-06-28 794
-
高性能的应变传感器——硅基谐振式应变传感器2017-10-12 8797
-
传感器对运动的捕捉有助于医疗的应用2018-06-13 1492
-
利用惯性传感器的人体运动空间轨迹追踪2018-02-09 1184
-
徐鸣研发了“滑动变阻器”工作原理的高性能石墨烯可拉伸应变传感器2019-08-27 5373
-
MEMS运动传感器原理2020-10-19 6959
-
可拉伸透明电容式应变传感器用于精准监测不同类型的人体活动2022-10-21 1962
-
中科院:研发具有高刺激分辨能力和分辨率的柔性应变-温度双模态传感器2023-03-14 2263
-
印度理工学院:研发TPU/石墨烯应变传感器,用于监测人体运动2023-03-28 1373
-
高伸缩性、高灵敏度应变传感器实现人体关节的运动捕捉2023-06-04 1298
-
快讯:华南师范大学研发运动捕捉的差分式柔性应变传感器 是德科技为自动驾驶推E8717A激光雷达目标模拟器2023-06-07 1832
全部0条评论

快来发表一下你的评论吧 !
