

爱普生M-G365/M-G366 MEMS六轴陀螺仪替代光纤陀螺仪
描述
爱普生M-G365/M-G366是一款性能达到光纤陀仪(FOG)级别的高性能性测量装置,作为新一代IMU标准,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器的高速DSP能以较低功耗提供高精度实时姿态角输出(横滚角/俯仰角/偏航角),可广泛适用于汽车等车辆、船只及其他多种工业产品和系统。用来测量数据和控制运动等,而且系统端不再需要动态姿态角的高速计算,从而减小了系统载荷和功耗。M-G365采用了最新开发的高性能传感器,具有稳定性更好、噪音更低、动态范围更广的优越特点,而且动态性能出色(比例因子非线性),非常适合诸如汽车、无人飞机等从静态到高速运动的高精度测量。M-G365的向后兼容性,更是大大降低了用户开发成本和评价时间,更有较低的电流消耗(16 mA,而M-G364和M-G354为18 mA)

评估测试环境搭建:
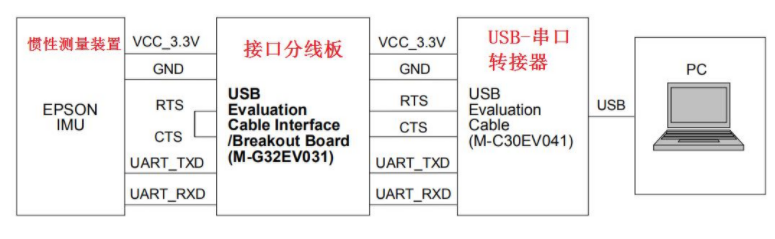
图1 环境搭建框图
上述这款接口分线板用来将爱普生M-G365六轴MEMS陀螺仪(惯性测量装置)1mm pitch的连接器转接到2.54mm pitch的连接器上,配合USB-串口转接器,使得PC能够控制惯性测量装置,大大简化了产品的测试评估。
六轴陀螺仪术语说明:
*1 惯性测量装置(IMU)是用于感应惯性运动的设备。它有三轴角速度传感器和三轴加速度计组成。也被称为六轴陀螺仪,属于MEMS陀螺仪。
*2 光纤陀螺仪(FOG)是一种在少量高性能IMU中使用的、基于光纤和光干涉特性的陀螺传感器。
*3 陀螺传感器(角速度传感器)测量单位时间上某物体关于参考轴的旋转角度(角速度)。
*4 零偏稳定性是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用1/f噪声密度表示。
*5 角随机游走是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用随机噪声密度表示。
*6 扩展卡尔曼滤波器利用模型估值和实际观察值依次计算最可能值,以便更准确地预测观察值中的信息,包括滤波器误差。
*7 数字信号处理器(DSP)是处理数字信号的高速运算电路。
*8 方位角(横滚角、俯仰角和偏航角):
• 横滚角:物体沿其纵轴旋转的角度
• 俯仰角:物体沿其横轴旋转的角度
• 偏航角:物体沿其垂直轴旋转的角度
光纤陀螺仪(FOG)以前曾经是环形激光陀螺仪(RLG)等其他技术的低成本替代品,现在该技术面临自爱普生高精度六轴陀螺仪新的竞争。微机电系统(MEMS)陀螺仪开始抢夺传统FOG应用的市场份额。具体来说,天线阵列稳定、农业机械控制、常规车辆导航成为MEMS和FOG对峙的战场。
爱普生MEM六轴陀螺仪与FOG光纤陀螺仪相比从性能参数看非常接近,特别是EPSON最新推出的M-G365等系列参数已经达到了FOG战术级性能水平,但其成本却比MEMS低出数倍。如果可以使用GNSS,而且应用的目的是在开放天空环境中运行,MEMS六轴陀螺仪可以取代OG光线陀螺仪。如果应用能够接收车辆或平台速度更新,则爱普生MEMS六轴陀螺仪系统可以达到与独立FOG系统相同的水平。这将迅速加速六轴陀螺仪在自动驾驶汽车等领域的推广应用。
对于普通车辆导航,这一点还不会产生影响,但此系统是针对需要适应高速率控制的应用设计的。此外还有几种MEMS陀螺仪提供良好的偏置稳定度,但带宽降低或噪声很高。为本系统选择的MEMS陀螺仪在带宽和性能之间达到了平衡。上表给出了所选MEMS的实际规格。
M-G365六轴陀螺仪使用的MEMS陀螺仪采用多核架构,该架构在稳定度、噪声、线性度和线性g性能之间达到了优化平衡。完全差分四谐振器与片内高性能信号调理密切配合,从而使得谐振器的必需响应范围最小,位于高度线性区,并且提供高度的振动抑制。
由于MEMS陀螺仪和加速度计集成到多轴IMU中(请参见图1),传感器的x/y/z正交性可能成为主要误差源。主要误差源往往由跨轴灵敏度或对准误差指定。常见规格是±2%跨轴灵敏度。本系统的IMU具有0.087%的跨轴灵敏度(0.05°正交性)。更重要的是,由于器件特定的校准在出厂前完成,此规格在温度范围内有效。
-
爱普生M-G365PDC1/M-G365PDF1六轴陀螺仪2024-11-21 1626
-
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍2024-09-02 2962
-
高速率控制应用下的汽车导航——M-G365/M-G3662024-05-28 1655
-
陀螺仪x轴和y轴的应用2024-04-17 1093
-
陀螺仪x和y比例是多少 陀螺仪x轴和y轴是指什么2024-01-17 4585
-
陀螺仪三轴六轴区别2024-01-02 7036
-
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别2023-08-21 9870
-
什么是MEMS陀螺仪?2023-07-07 6306
-
三轴陀螺仪和六轴陀螺仪的区别2018-11-08 4879
-
分析三轴陀螺仪的工作原理及应用2018-10-23 20452
-
浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术2018-07-30 14696
-
MEMS陀螺仪可否取代光纤陀螺仪技术2018-02-24 10847
-
MEMS陀螺仪技术原理_三轴陀螺仪技术原理2017-12-01 16607
-
手机中的三轴陀螺仪2012-04-10 8632
全部0条评论

快来发表一下你的评论吧 !
