

LED恒流驱动芯片的滞环控制电路
电源设计应用
描述
1 引言
设计了一款降压型L ED 恒流驱动芯片的滞环控制电路。 该芯片采用高边电流检测方案,运用滞环电流控制方法对驱动电流进行滞环控制,从而获得恒定的平均驱动电流。 设计采用简单的设计理念实现恒流驱动,不需要复杂的电路分析,能实现精确的电流控制,且自身具有稳定性。
2 电路设计与原理分析
2. 1 滞环控制原理
滞流控制模块应用如图1 所示,L ED 驱动电流的变化反应在检测电阻RSENSE两端的压差变化上。 本设计中,检测电阻设为0. 5Ω ,较小的检测电阻有利于降低功耗和保持较高的转换效率。 滞环电流控制模块内部自建两个电压阈值,检测电压Vcs与阈值电压进行比较,比较结果和DIM 调光信号相与来控制功率开关管的通断。
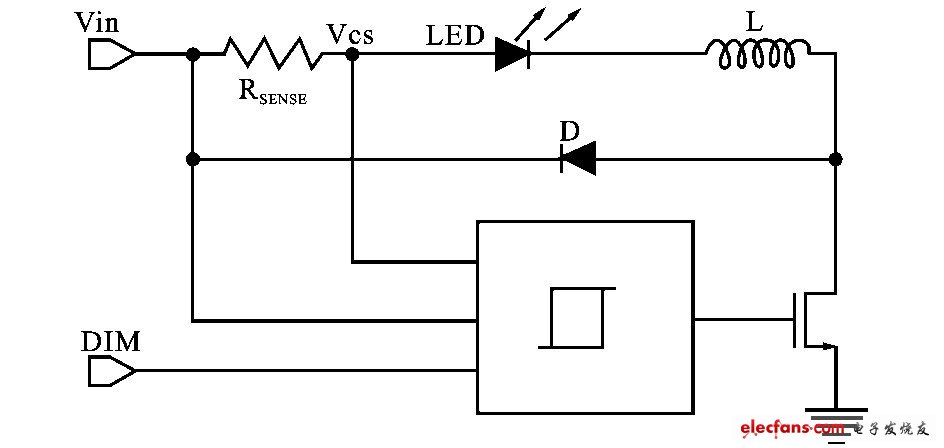
图1 滞流控制模块应用图示
使用PWM 调光, 在减少电流占空周期内给L ED 提供完整电流, 例如要将亮度减半, 只需在50 %的占空周期内提供完整的电流。 通常PWM 调光信号的频率会超过100Hz ,以确保这个脉冲电流不会被人眼所察觉。
滞流控制模块内部电路如图2 所示,当DIM 信号为高电平期间,当Vcs 大于上电压阈值时,控制电路输出低电平,关闭功率开关管。 由LED、电感L 、续流二极管D 和RSENSE组成的回路使得电感继续为L ED 提供电流,电感电流逐渐减小,使得检测电压Vcs 随之减小;当Vcs 小于下阈值电压时,控制电路输出高电平,导通功率开关管,此时D 截止,形成从电源经RSENSE、L ED、L 和功率开关管到地的回路,电源为电感L 充电,电感电流上升,检测电压Vcs随之升高。 Vcs 大于上电压阈值时,控制电路关断开关管,重复上个周期的动作,这样就完成了对L ED驱动电流的滞环电流控制,使得流过L ED 的驱动电流,也就是电感电流的平均值恒定。
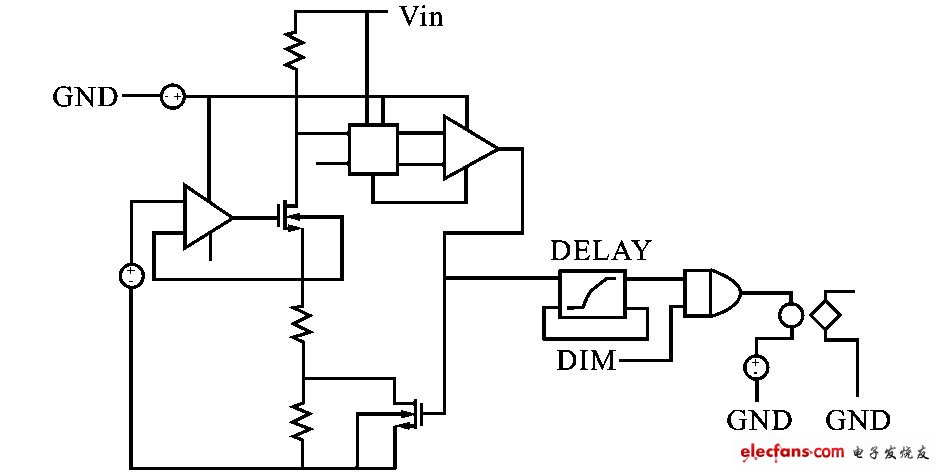
图2 滞流控制模块内部模块
2. 2 滞环比较电压产生电路
4. 5V~28V 的输入电压经调整转换为5V 的恒定电压Vcc 为后续电路供电。 如图3 所示,A 点电位受运算放大器钳制,将等于参考电压1. 2V ,假设输出V out 为高电平,则M2 导通,流过M1 的电流为IM1 = V ref / R2 ,B 点的电压为V BL = V in - IM1 R1 ;当V out为低电平,M2 截止,流过M1 的电流变为I′M1= V ref / ( R2 + R3 ) ,B 点电压升高为V BH = V in -I′M1 R1 ,所以B 点电压的变化为ΔV B = V BH - V BL= V ref R1 R3/ R2 ( R2 + R3) ,这意味着V out由高电平变成低电平时在B 点产生的一个滞环电压,可见该滞环电压与输入电压无关,只由参考电压V ref和电阻大小决定,通过选择各电阻的阻值便可设定滞环电压的大小。
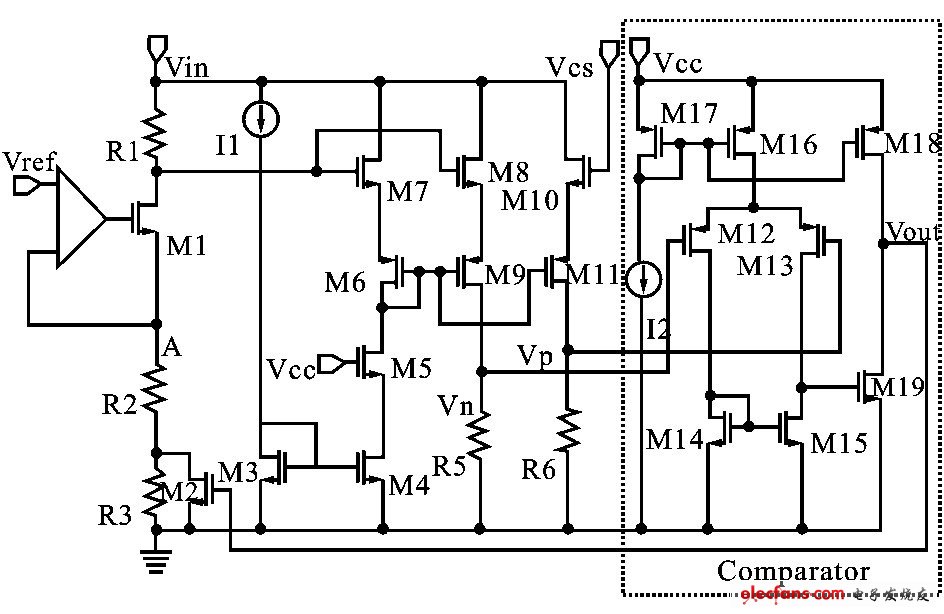
图3 滞流比较电压产生电路
2. 3 运放实现电路
以上分析可知运算放大器起着重要作用,其必须具有较高的增益,才能使A 点电压精确跟随参考电压,从而准确设定B 点电平和滞环电压大小。 另外由于V out的变化频率与系统开关频率相同(系统的最大开关频率约为2MHz) ,使得流过M1 的电流也相同频率在IM1和I′M1之间快速切换,所以运放的单位增益带宽须大于系统的最大开关频率。 设计的运放结构如图4 所示,采用折叠式输入结构,可以获得较大的共模输入电压范围。
由运放的频率特性仿真图5 可知,增益达到84. 266dB ,相位裕度108°,单位增益带宽约12MHz ,满足电路要求。
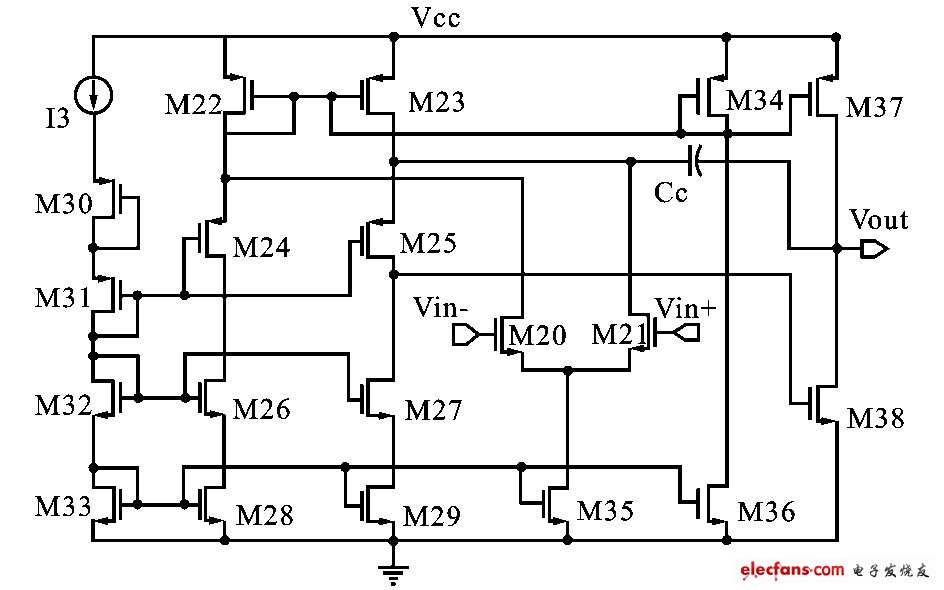
图4 运放实现电路
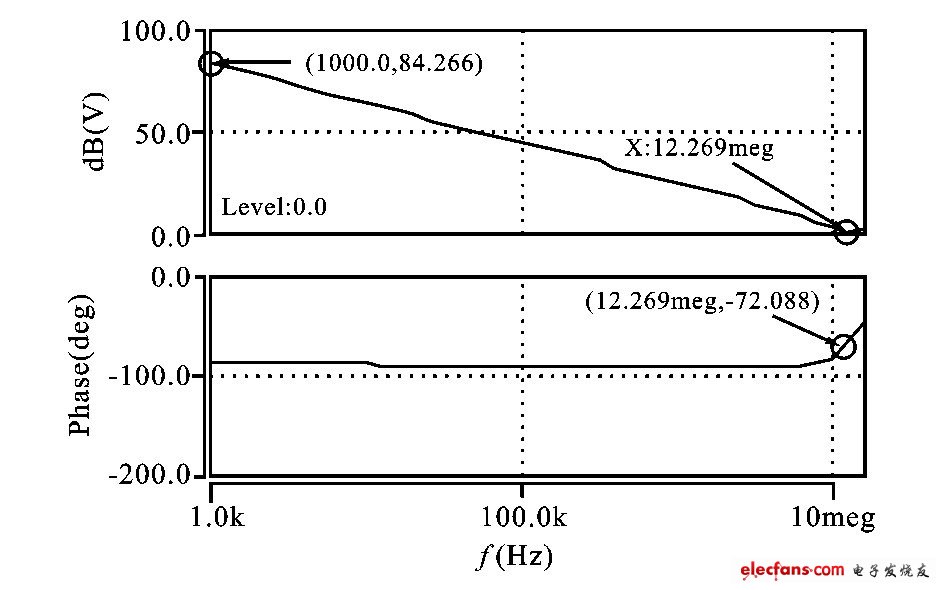
图5 运放频率特性仿真
2. 4 平均驱动电流

设定
运放将点A 电位钳位于带隙电压基准上。 由M7 - M8 、M6 - M9 组成的级联电流镜将偏置电流I1 镜像到M8 - M9 - R5 所在支路,所以Compara2tor 模块的一个输入端电压V n 保持一定,另一输入端电压V p 将跟随检测电压V cs变化。 当比较器输出V out为高电平(开关管导通) 时,B 点电压为VBL 即下限阈值检测电压V CSMIN ,当V cs下降到此阈值时,由M6~M11 组成的对称电路结构使流过R5 、R6的电流相等,此时V n = V p . 若V cs < V CSMIN ,即V p< V n ,比较器翻转,输出V out为低电平。 当V out变至低电平后,M2 截止,B 点电压将变为V BH , V BH即是上限阈值电压V CSMAX ,流过L ED 的平均驱动电流是

由B 点平均电压设定:
滞环电流范围:
上式决定了驱动电流的纹波大小。
3 仿真结果分析
文中电路采用0. 5μm 5V/ 18V/ 40V CDMOS工艺,用Hspice Z - 2007. 03 进行仿真。 在脉冲宽度为200μs、周期为300μs 的DIM 信号和V in = 12V(典型值) 的共同作用下,仿真结果如图6 所示。
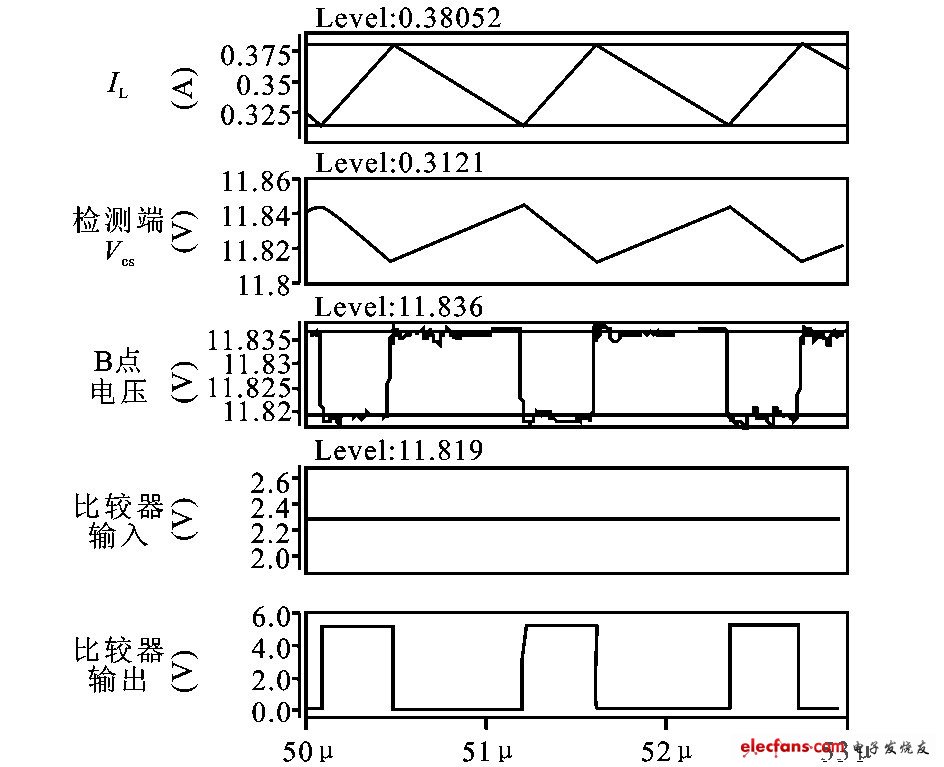
图6 Vin = 12V 时的电路仿真
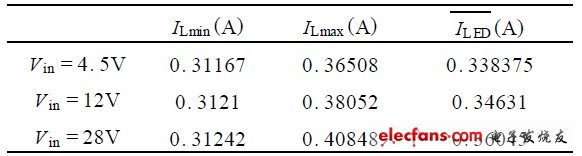
分别在V in = 2. 5V , V in = 28V 的情况下,再次对L ED 驱动电流进行仿真,三次仿真数据结果分别如表1 所示。
表1 三种输入电压情况下的驱动电流
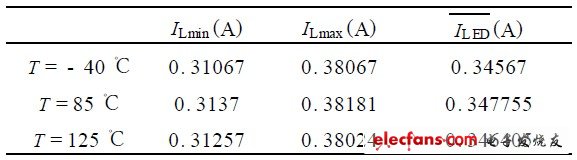
在V in = 12V 时,对LED 驱动电流进行温度特性仿真,三次仿真波形结果分别如表2 所示。 可以看出,芯片的温度特性较好。
表2 Vin = 12V 情况下三种环境温度下的驱动电流
由于系统的固定延时τ对电流的纹波存在影响,实际的驱动电流峰值是IMAX +τoff di/ dt , 电流谷值是IMIN - τON di/ dt ,τoff 为从驱动电流大于设定值到功率开关关闭的系统延时,τon 为从驱动电流小于设定值到功率开关导通的系统延时, di/ dt 是电感电流变化率。 则电感若取较大值,对驱动电流平均值影响不大,但可以减小电流纹波, 反之, 这是以增加外部电感体积为代价的。
电路可达很高的效率, 一方面检测电阻中的功耗

会导致电源功率耗散,但本设计中RSENSE = 0. 5Ω,则PRSENSE 相当小,另一方面,系统效率定义为LED 消耗的功率与电源提供的功率之比, 即η = PLED/ PPOWER. 其中, PPOWER =V in3 Ivin , PLED = V LED*

,从仿真可知, Ivin 的平均值远远小于

, 所以系统的效率可以达到非常高。
4 结束语
文中设计了一款适用于降压型L ED 恒流驱动芯片的滞环控制电路。 采用高边电流检测方案,运用滞环电流控制方法对驱动电流进行滞环控制,从而获得恒定的平均驱动电流,通过调节外部检测电阻,可调节恒定L ED 驱动电流。 芯片采用015μm 5V/18V/ 40V CDMOS 工艺,电源电压范围为4. 5V~28V ,可为L ED 提供约恒定的350mA 驱动电流,温度特性- 40 ℃~125 ℃,可达到相当高的效率。 当V in从4. 5V 变化到28V 时,平均驱动电流变化22mA ,最大恒流精度为6. 2 %.
-
LED线性恒流驱动芯片SM20872015-12-10 3290
-
LED驱动降压恒流芯片_输入5.5-36V内置MOS管2018-08-07 1755
-
LED降压恒流驱动芯片内置MOS共阳可PWM模拟调光驱动芯片!2020-09-11 6266
-
固定 关断时间控制电路,恒流驱动电路等,特别适合大功率 LED 恒流驱动2021-07-08 1222
-
恒流驱动电路等,特别适合大功率 LED 恒流驱动2021-07-13 1645
-
LED恒流驱动控制IC-PJ99102010-03-05 1156
-
一种滞环恒流LED驱动电路的电流采样电路2012-01-11 1279
-
LED高压线性恒流IC_SM2082ED单通道LED恒流驱动控制芯片2016-09-19 2485
-
采用自适应滞环控制的LED恒流驱动芯片_黄少卿2017-01-08 982
-
TL431驱动LED恒流控制电路方案2017-12-13 34603
-
LED恒流驱动芯片的滞环控制电路设计2019-09-20 5586
-
LED灯恒流驱动控制芯片AP5103介绍2022-12-16 3826
-
LED 灯恒流驱动控制芯片AP5103产品概述2023-09-03 3291
-
LED恒流驱动芯片:升压恒流和降压恒流的区别和应用场景2024-08-09 6722
-
PC0310 高亮度恒流LED驱动控制电路数据手册2025-08-01 1058
全部0条评论

快来发表一下你的评论吧 !
