

如何设计一款四轮智能小车
电子说
描述
如何设计一款四轮智能小车
此部分共分为五个小节,通过这个 Part 的学习,我们将了解机器人的概念和组成,对机器人的整体设计有一个明确的思路,然后通过机械结构、驱动系统、传感系统、控制系统四大组成部分,展开介绍设计一款智能小车的基本思路。
通过这一讲课程,我们希望大家脑海中能够对智能小车有一个明确的认识和开发思路,未来我们再逐个击破,把它一点一点做出来。
总体设计思路

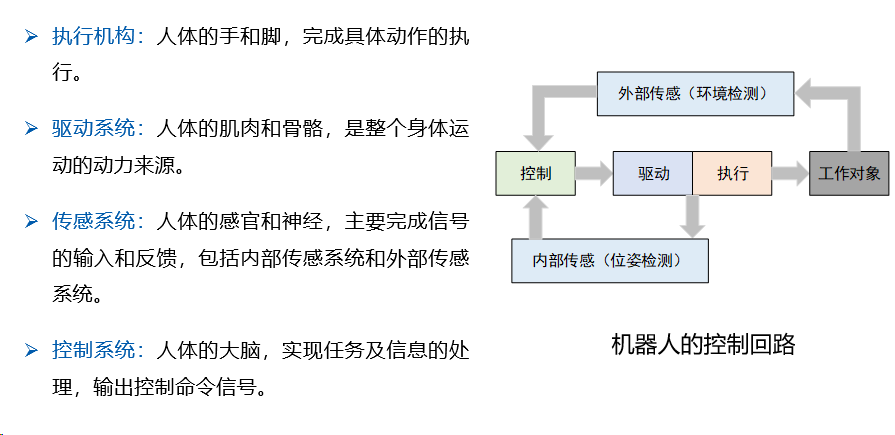
从控制的角度来讲,机器人可以划分为图中四大组成部分,分别是:传感系统、执行机构、驱动系统和控制系统。
先来看执行机构,这是机器人要动起来的重要装置,比如移动机器人是需要移动的,那如何带动轮子旋转或者转弯呢,就是类似这样的电机、舵机来执行运动的。但并不是所有运动部位都会安装电机,比如一辆真实的汽车,一般只有一个电机或者发动机,那如何让两个轮子,甚至四个轮子都转起来呢,这就需要一个完成动力分配的传动系统,比如转弯的时候动态调整左右两个轮子的速度,这需要严密的机械设计,也就是差速器的功能。除了移动机器人,在一些工业机器人中,驱动机器人的关节电机、抓取物体的吸盘夹爪,也可以看做是执行机构。总之,执行机构就是执行运动的一套装置。
为了让执行机构准确的执行动作,还需要在执行机构前连接一套驱动系统,比如我们要让机器人的电机按照1m/s的速度旋转,如何动态的调整电压、电流,来达到准确的运动目的呢,这就是由电机驱动器来实现的。如果是电动执行机构的话,其配套的驱动系统一般都是由驱动板卡+控制软件组成,也是嵌入式系统应用的重要领域,我们在学校中学习的单片机、PID、数字电路等概念,都和这个部分紧密相连。驱动系统的选择是根据执行机构来的,比如普通的直流电机,用类似这样的电机驱动板就行,工业上常用的伺服电机,都会用到220V甚者380V电压,就得用专业的伺服驱动器了,还有类似吸盘的气压驱动,外接键盘鼠标一样的外设驱动,以及各种各样的传感器驱动,总之,驱动系统的职责就是保证机器人各种设备的正常运行。
机器人光动是不行的,还需要具备感知能力,这就得靠传感系统了。传感系统一般分为内部传感和外部传感,内部传感是用来感知机器人自身状态的,比如通过里程计计算自己轮子旋转的速度,从而计算累积位移,通过陀螺仪感知机器人自身的角加速度,判断转弯时的状态,通过加速度计,感知机器人在各个运动方向上的加速度,可以用来判断运动趋势或者上下坡,还有力传感器,可以用来感知机器人自身与外部的相互作用力度,比如抓一个鸡蛋,但又不至于抓破。
与内部传感器相反,外部传感器帮助机器人感知外部信息,类似人眼一样,使用摄像头来看到外部的彩色图像,不过机器人可以通过多种外部传感器超越人类的极限,比如可以使用红外传感器,在没有光线的情况下,也可以看到外部环境,类似夜视仪一样,还可以利用激光雷达、声纳、超声波等距离传感器,感知在某个角度范围内的障碍物距离,还有麦克风和喇叭,方便我们与机器人语音交流。
传感系统是智能机器人的重要组成,很多机器人甚至装备了几十上百个传感器,感知自身与环境的各种信息,比如自动驾驶汽车就是如此。
在这些系统的上层,就是机器人的大脑——控制系统了。控制系统一般也是硬件+软件组成,硬件大多采用计算资源丰富的处理器,比如我们常用的笔记本电脑、树莓派、英伟达板卡等;其中运行的软件就是各种丰富的应用程序了,比如让机器人建立未知环境的地图,或者让机器人运动到送餐地点,再或者是让机器人识别人脸。
智能机器人的核心算法体现,都是在控制系统中完成,这也是我们未来做机器人软件开发的主要位置。
机器人实例

机械结构设计
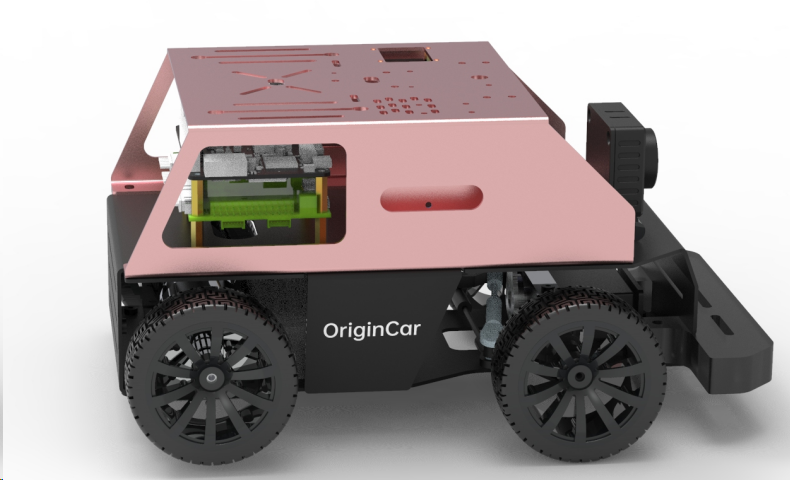
以上述机器人为例,直观看上去,似乎这个小车并不复杂。
底盘是整个小车的底座,通过螺丝安装了四个个车轮和配套的电机以及舵机,用来驱动小车运动。
底盘上第一层是电池,相对比较重,尽量放在下边,可以让小车的中心靠下,第二层则用来放置主要的传感器和控制器板卡,这样可以很好的隐藏两层板的叠加同时让板卡更加安全。
小车底盘的前端,为了安装相机,我们要设计一个安装的支架,一侧用螺丝固定在底盘上,另外一侧可以固定相机,最好还可以调节相机可视角度。
第三层则有一个LED显示屏以及一些通孔,可以用来放置一些方便调试以及需要一定高度的传感器如雷达等。
此外在车体两侧还放置了RGB灯带,可以让小车看起来更加炫酷。
这就是智能小车的机械结构啦,大家可以根据自己选择的各种零部件尺寸。
接下来,我们把焦点放到小车的执行结构上,也就是这两个电机和四个轮子,它们如何控制小车运动呢?
其实对于智能小车而言,常见的有三种形态运动方式,接下来一一介绍。
审核编辑 黄宇
-
一台四驱麦克纳姆轮小车的设计资料分享2022-02-15 1416
-
基于TX2的全向四轮小车搭建(一)2021-11-21 1185
-
如何从零开始搭建一个四轮小车模型?2021-11-11 1869
-
怎样去设计一种基于STM32的四轮遥控小车2021-10-19 2054
-
基于RT Thread操作系统的智能视觉组四轮循迹智能小车系统设计2021-09-13 1686
-
如何去搭建一种基于Jetson TX2的全向四轮小车2021-08-26 1822
-
一款简易的自平衡小车设计2021-08-06 1716
-
基于stm32的两轮自平衡小车2021-07-27 1868
-
如何利用MSP430/MSP432去设计制作一个四轮电动小车?2021-07-19 4039
-
四轮智能小车避障设计的程序和工程文件免费下载2020-12-25 1133
-
四轮瑞士轮的全向小车质心不在几何中心,小车起步和停止的时候会发生偏移2019-01-22 2880
-
arduino光电循迹搬运小车该用四轮车吗?2018-09-25 4852
-
myRIO 四轮小车2016-01-19 11481
-
想做小车,用四轮的还是两轮的好???2013-02-24 27790
全部0条评论

快来发表一下你的评论吧 !
