

深入了解雷达图像分辨率的特性与应用
电子说
描述
距离向分辨率
距离向分辨率对应于快时间域的分辨率,所谓快时间,是指每个雷达回波采集的时间历程。时域的高分辨可通过使用大带宽的雷达信号波形,采取匹配滤波或信号压缩的信号处理技术获取。距离向分辨率可表示为
式中: 是光速; 是带宽。
常用的获取距离高分辨率的波形有短脉冲、chirp 信号和步进频率信号。
短脉冲是一种短脉宽的单频脉冲,受雷达硬件条件限制,不能进行长距离测量。chirp 信号是一种线性调频脉冲,可获得很大的时宽带宽积,不仅可以获得高分辨,而且还可以进行远距离测量。
步进频率信号是一脉冲串,实际上是进行目标的频率域采样,通过信号处理的方式合成距离像。它受最大无模糊距离窗的限制,且信号采集时间较长,只适合做中短距离目标测量。另外它只能给出目标上各散射点的相对位置,不能获得其绝对位置。
当然还有其他类型的波形,如变载频的 chirp 序列、编码信号波形等,但实际上雷达成像中常用的波形就是 chirp 信号和步进频率信号。
方位分辨率
实孔径雷达的方位分辨率
实孔径成像系统中,其方位分辨率依赖于天线的波束宽度。为定义方位分辨率,常用的是采用 波束宽,即
式中: 为波长; 为天线长度。为了方便有时也将波束宽度定义为 波束宽,其值为
以下均将上式看作标准波束宽度。从上式可以看出,对于实孔径雷达,有两种方法可以改善方位向分辨率,一种方法是减小波长,另一种方法是增大天线长度。
波长不能无限制减小,因为当波长小于 之后,空气对微波的吸收增加,造成微波的传输损失;另一方面,天线长度受物理上的限制,天线不可能做得太长。
实孔径雷达的方位分辨率表达为
式中: 是雷达和目标之间的斜距。
SAR/ISAR 的方位分辨率
合成孔径的基本原理得益于雷达和目标之间的相对运动,利用相对运动实现对目标在不同方位角度上的测量。
对于 SAR 来讲,目标静止而雷达运动。合成孔径雷达的方位向分辨率和实孔径雷达的方位分辨率截然不同。这里以正侧视条带式 SAR 为例说明,如下图所示。
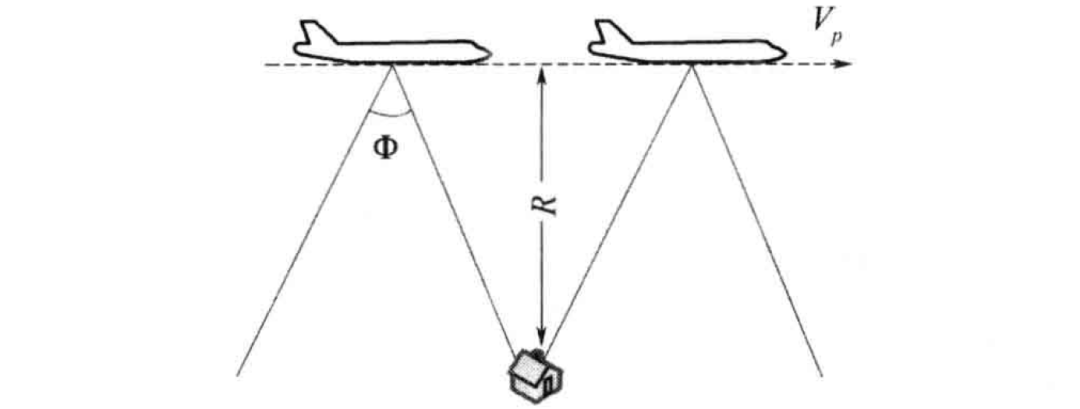
图中雷达到目标的正侧视距离为 ,雷达运动速度为 ,雷达波束宽度沿方位向为 ,因此方位向回波信号带宽可写为
因此合成孔径雷达的方位向分辨率为
可见,条带模式合成孔径雷达的理论方位分辨率仅与天线长度有关,天线越短,合成孔径就越大,因此方位分辨率就越高。但天线不能无限制小,因为受到接收机的最小可探测信号信噪比的限制。
对于 ISAR 而言,主要利用目标在雷达观测波束内的旋转实现方位向分辨。这种旋转运动(方位角的变化)导致了目标上的散射点有不同的多普勒频移,这是合成方位分辨率的基本出发点。
ISAR 图像的方位向分辨率也可从多普勒带宽的角度来理解。假设目标转动角速度为 ,某散射点方位向离转动中心的距离为 ,则该散射点相对于雷达的径向速度为 ,因此该目标点引入的多普勒频率为
若整个观测时间或相干时间为 ,则多普勒分辨率为
根据上述分析,有 ,因此有 ,可得方位分辨率为
ISAR 图像的方位分辨率依赖于两方面,一个是相干处理时间,另一个是旋转运动的角速度。
后者仅和目标运动有关,不能由成像系统控制,因此 ISAR 处理过程实际上是一个盲信号处理过程,这也是有些情况下(如目标在雷达之间不存在旋转运动时)不能重建 ISAR 图像的原因。
前者易受控,为获取高方位分辨率,可增大相干处理时间。但增大相干处理时间会导致图像质量的降低,例如出现模糊、拖尾现象等。
从上式可以看出,ISAR 图像的方位向分辨率和目标在波束内转过的角度有关。它可以写为
因此,合成孔径雷达的方位向分辨率实际上也和雷达观测目标时在一个合成孔径内平台相对于目标转过的视角有关。
审核编辑:黄飞
-
高分辨率合成孔径雷达图像的直线特征多尺度提取方法2010-05-06 1862
-
深入了解主动电扫描阵列(AESA)雷达系统2021-05-24 4054
-
超分辨率图像重建方法研究2009-03-14 738
-
基于POCS算法的图像超分辨率重建2010-11-08 967
-
什么是分辨率2009-05-24 1501
-
数码相机图像分辨率2009-12-18 931
-
序列图像超分辨率重建算法研究2012-03-08 1175
-
一种基于参考高分辨率图像的视频序列超分辨率复原算法2017-10-26 1382
-
分辨率有两种:即显示分辨率和图像分辨率2019-11-19 18258
-
如何提高汽车雷达方位角的分辨率PDF文件讲解2020-11-27 1906
-
如何使用波束实孔径雷达图像提升汽车雷达方位角分辨率的成像方法2020-11-30 1838
-
单张图像超分辨率和立体图像超分辨率的相关工作2023-06-27 2291
-
浅谈相机的图像分辨率2024-01-09 4746
-
镜头分辨率简述2024-01-15 2272
-
基于CNN的图像超分辨率示例2024-03-11 2122
全部0条评论

快来发表一下你的评论吧 !
