

公用电话网实现的智能路灯控制器
网络协议
描述
随着各城市对路灯照明的重视, 路灯照明的管理、监测、控制和维护的工作量增大,人力物力资源有限的问题日益突出。为提高路灯管理效率,需要一种新型的路灯远程监控系统。从目前的技术条件及从通信距离、实时性、可靠性与安全性等诸多方面的综合造价,基于公用电话网(PSTN)的远程监控系统更适合一些。故针对路灯管理处设备陈旧、可靠性差、设备有限、投资少、故障多、线路多、管理维护不方便等情况,选择PSTN 通讯方式,设计开发基于AT89S8252 智能路灯控制器, 对城市路灯运行状态进行远程智能监控。
智能路灯控制器是系统的主要组成部分。它关系到上位机与路灯控制器的信息交互, 是系统信息交换的枢纽。智能路灯控制器既可以起到上传下达的作用,也可以单独对路灯进行控制。它与上位机是采用PSTN 通信,完成控制器运行数据的传输。这样既可以实现远程通信,也可以节约线路成本。控制更为精细。系统构架如图1所示。

2 智能路灯控制器硬件电路设计与功能描述
2.1 测量电路
在测量电路中, 采样电路需要采集三相电压信号和四相电流信号(包括零线电流) 。本系统采用直流采样法。电压变化电路如图2 所示。
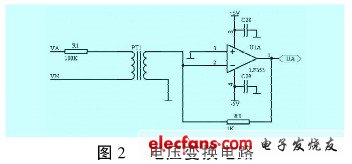
图2 中PT1 是一种电流型电压互感器,A 相输入电压经限流电阻R1(100K),使PT1 初级(原边)的额定电流为2.
2mA,次级(副边)会产生一个相同的电流。通过运算放大器(LF353),用户可以通过调节反馈电阻R3 的值在输出端得到所要求的电压输出。以标准工频电压220V 为例,可以算出转换后A 相电压有效值为:,转换后的电压信号满足各元器件的输入电压要求。
电流变换电路采用精密电流互感器CTY205A(CT1),电流变化电路如图3 所示。
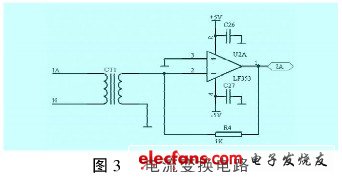
通过运算放大器(LF353)的作用,用户可以调节反馈电阻R4 的值在输出端得到所要求的电压输出。以电流(交流值AC)5A 为例,电流互感器转换出来的电流信号为:,转换后的电流信号满足系统各元器件的输入电压要求。
电压电流经互感器变换, 输入双四选一译码器, 微处理器通过控制电压、电流值进行多路转换。选用LF353 连接成射极跟随器,起到隔离、跟随的作用。多路转换模块如图4 所示。电压电流监测模块选用有效值转换芯片AD536 计算输入的复杂的交流值AC 的均方根值, 输出一个等效的直流值D C 。再输入系统中的ADC 转换电路。电压电流监测模块如图5 所示。

电压电流监测模块所采集的两路信号需经过模数转换器变换后输入控制器,因此选用DS2450 模数转换接口芯片。DS2450 是DALLAS 公司生产的一线式4 通道逐次逼近式A/D 转换器,其输入电压范围、转换精度位数、报警门限电压可编程;每个通道有各自的存储器以存储电压范围设置、转换结果、门限电压等参数;普通方式下串行通信速率达16.3kbps,超速工作时速率达142kbps,片内16 位循环冗余校验码生成器可用于检测通信的正确性;DS2450 采用8 引脚SOIC 小体积封装形式, 既可用单5V 电源供电, 也可采用寄生电源方式供电。电路正常工作时仅消耗2. 5mW 功率,不工作时消耗25 μW。CPU 只需一根端口线就能与诸多一线式芯片通信, 占用微处理器的端口较少, 可节省大量的引线和逻辑电路。模数转换接口电路如图6 所示。
2.2 显示与时钟电路
控制器具有良好的人机交互能力,采用160x128 点阵带背光LCD 显示屏,可显示汉字和西文字符。驱动部分是T6963C 控制液晶显示驱动系统的接口[5]。它由液晶显示时序发生器、图形数据锁存器、文本数据锁存器、显示选择器、串行传输电路以及液晶显示数据输出接口等组成。操作人员可按照LCD 显示屏的提示,通过按键设置开关路灯控制方案、运行控制数据、状态数据等,智能路灯控制器运行时,比照开关路灯时间与DS1302 的时间信息,驱动路灯动作,能够有效节约系统建设投资,取代现有钟控制器、光控制器。显示与时钟电路如图7 所示。

2.3 输出电路
控制器将P2.1-P2.5 口作为路灯控制输出的IO 口,输出电路中应用反向器驱动达林顿管, 达林顿管的集电极和发射极之间连接正泰12V 5A 继电器,将继电器的三个无源触点引出, 配合外围接触器驱动路灯。电路利用发光二级管作为通电指示。路灯驱动电路如图8 所示。

2.4 MODEM通信接口设计
远程控制系统的关键模块是通信模块,基于PSTN 远程系统的关键则是调制解调器(MODEM)通信接口模块。

系统采用上、下位主从结构设计,上位机为主叫方,下位机为被叫方。上位机以定时循检或随即抽检两种方式获取各下位机采集到的数据。定时循检:系统每隔十分钟(时间可随意设定)对各个下位机控制器进行电压、电流数据采集,并把该数据存储到上位机中。随即抽检通过微机键盘或鼠标操作可随时检测各个下位机控制器的运行数据,并能通过指令改变下位机控制器的运行状态。MODEM通信接口电路设计如图9 所示。从图中可知,RS-232 的接收端与连MODEM的DB9 的第2 脚相连,发送端与DB9 的第3脚相连,实现“三线式”远程通信。在MODEM的接口电路设计中,为了防止MODEM可能无法挂机而无法响应微处理器传来的复位命令。引入MODEM电源控制电路,当下位机每次响应呼叫并正确发送数据后,由程序控制MODEM端口改变9012 三极管的状态,完成MODEM的阴阳极同时开关控制。由于调制解调器的供电功率一般在9W以下,因此采用OMROM G5V-2 小型继电器,该继电器可靠性高,工作电压为5V,与单片机系统接口简单。
3 系统软件设计
在编写系统软件时, 应当对整个软件流程进行清晰的描述, 以便在进行程序编写时有很明晰的框架接口,以使得软件编程高效化, 维护规范化, 以及最大化的可扩展性。对于本系统的软件的被控对象有以下几个:
对于外部对象:1)时钟电路;2)外部中断;3)AD 芯片转换处理;4)显示与键盘操作。对于内部操作:1)串行口通信事务的处理;2)输出电路的处理。
对受控对象进行分析, 就可以划分出两类基本流程,一种是可预测的基本事务流程:从上电开始的初始化→时钟数据读取→对基本事务的处理→显示处理→循环等待外部中断。第二种是不可预测的中断事务处理:1)来自于键盘的中断事务;2)来自于串行口的中断事务;对于中断事务的处理是不具有完全可预测的但是应当是有规律并且是完全可控的。在基本事务流程中,中断事务的处理所占的CPU 时间应当是很少的一个部分,并且各个中断之间的同时发生的概率不能太大。按照上述分析,利用KEILCX51 所开发智能路灯控制器的主程序流程如图10 所示。

4 结束语
在试验条件下, 对于智能路灯控制器的各项测试都得到了满意的结果, 为其进一步的推广与应用提供了有利参考。
-
公用电话交换网的原理是什么?2019-09-27 2490
-
公用数据网有什么特点 ?2020-04-02 2720
-
非话用户终端设备与公用电话网接口技术要求和测试方法 YD/T2009-08-20 579
-
基于公用电话网的MCS-51单片机远程数据传输装置2009-09-10 1025
-
基于Internet的远程控制系统2009-09-11 728
-
公用电话收费计时器电路图2009-04-09 1063
-
防盗报警系统的设计与实现?2009-05-10 3862
-
基于公用电话网的电信交接箱集中监控管理系统2009-05-11 1209
-
一种基于公用电话网的家电遥控系统2009-05-17 1162
-
无线公用电话的电源电路2009-11-01 951
-
双音多频收发器MT8880在智能通讯预警系统中的技术应用2009-11-07 2721
-
公用电子信箱业务是什么意思2010-03-06 1633
-
智能电话网远程家电控制系统的设计2010-04-10 2261
-
家用智能控制器的设计2012-04-20 1250
全部0条评论

快来发表一下你的评论吧 !
