

激光雷达分辨率对比方法与技巧详解
MEMS/传感技术
描述
激光雷达在城市导航辅助驾驶(NOA)、自动紧急刹车(AEB)等功能中扮演着重要的感知角色,是保障行车安全的关键传感器。作为智能汽车的 3D 之眼,激光雷达的分辨率决定了其对世界还原的精细程度。分辨率更高,激光雷达“看得”越精准,给系统做出反应和决策的时间也就越充裕,甚至在关键时刻能够拯救生命。
但是,与二维摄像头不同,三维激光雷达的分辨率到底如何定义、如何计算呢?
全局分辨率
分辨率这个词是从摄像头沿用而来,摄像头拍出来的单幅图像,其像素点均匀分布在横纵两个维度的画面中,因此「横向像素点 x 纵向像素点」就能直接反映出摄像头分辨率的高低。比如 1280 x 720 代表着横向有 1280 个像素点,纵向有 720 个像素点,其清晰度一定优于 320 x 180。
激光雷达发射出的激光点是分布于三维空间之中的,这些点以设定好的频率不断刷新,被称为“点云”。如果从汽车的视角出发,把单次刷新的三维点云投影“压扁”到一个平面上,也能得到一个类似于二维画面的横纵点阵图。如果该激光雷达的点云分布是均匀的,那我们就能够以这个二维投射面上的点数来衡量此激光雷达的清晰度,即全局分辨率。
比如,禾赛 AT128 的点云均匀分布于其视场之内,其“压扁”后的二维点阵图也像摄像头一样均匀分布,横向有 1200 个激光点,纵向有 128 个激光点,其全局分辨率为 1200 x 128。
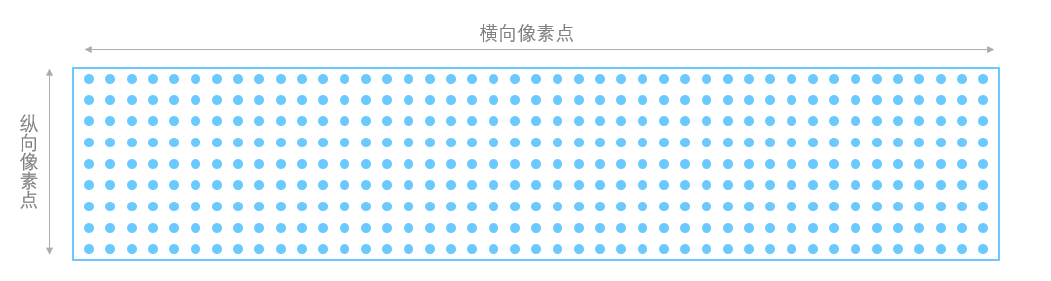
点云均匀分布的二维示意图
但是,不是所有激光雷达的点云都呈均匀分布。比如,有一类激光雷达会将能量聚集于中心的部分区域,其中间点云比较密、周围较稀疏。中间较密的那一块就被称为 ROI 区域,即 Region of Interest。对于此类激光雷达,就无法用全局分辨率来描述它的清晰度了。
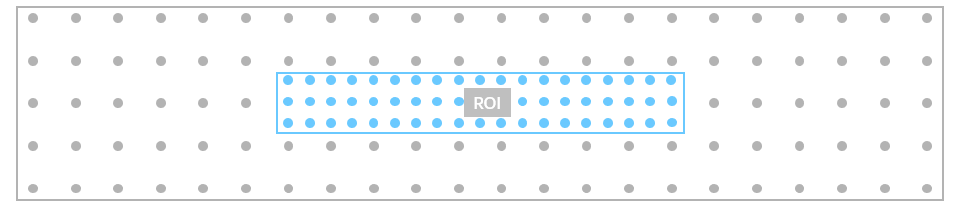
点云非均匀分布示意图
对于有 ROI 区域、点云分布不均匀的激光雷达来说,要想衡量这种激光雷达的分辨率,则需引入「点频」和「角分辨率」这两个概念。
点频和帧率
先来说说点频。对于激光雷达来说,点频比分辨率更能从本质上反映激光雷达在三维空间内的点云密度,是能全面反映激光雷达感知清晰度的综合指标。在同样的刷新率下,点频越高,点云越密,单帧画面越清晰。
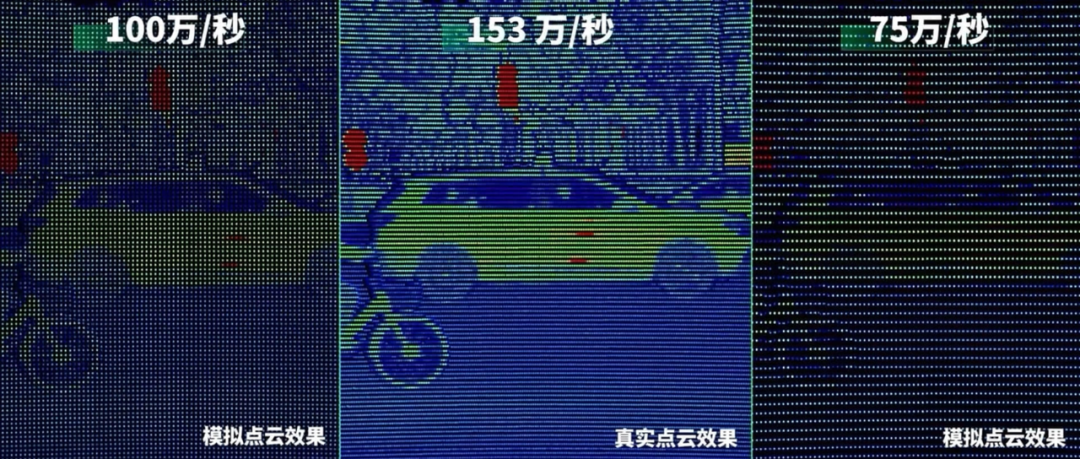
不同点频的点云效果对比(刷新率均为10Hz)
有人会问,1200 x 128 = 15.36 万,为什么 AT128 的点频是 153.6 万/秒呢?
因为点频的概念是激光雷达在三维视场内每秒发出的激光点数,除了横纵两个方向,还要乘以它的刷新率,也就是帧率。
对于点云分布均匀的激光雷达而言:
点频=横向像素点 x 纵向像素点 x 帧率
AT128 常见的使用帧率是 10 Hz,即每秒刷新 10 次,因此它的点频为 1200 x 128 x 10 = 153.6 万点/秒。
10Hz的激光雷达每秒刷新10次,可想象为每秒发射10次平面点阵
那么是不是帧率越高越好呢?答案:不是的。
因为对于一台已经设计好的激光雷达,每秒的出点数(点频)通常是个固定值。
也就是说,总点数一样,刷新速度越快,每一帧画面分到的点数就越少,因为同样数量的像素点会被平均「切分」到更多幅画面,因此刷新率提高一倍,其单帧画面的像素点反而会下降一半。
激光雷达帧率具体设定为 10 Hz 还是 20 Hz,其实是用户、也就是主机厂决定的。目前绝大部分主机厂的算法团队都要求激光雷达的帧率输出为 10 Hz,这也是比较常见的做法。
另外不难引申一步看出激光雷达点云演示视频的密度,其实可以通过调整帧率、再给视频加速的方式「注水」。不过这种做法只能“忽悠”外行人,主机厂或自动驾驶公司一般会要求真机测试,实际的点云密度一测便知。
角分辨率
最后,再聊聊角分辨率。多了一个“角”字,可想而知与角度相关,激光雷达射出的激光相邻光束之间有一个夹角,这个夹角的度数被称为角分辨率,就是我们常常在激光雷达参数表里看到的 0.2°、0.1°、甚至 0.05°。
这个夹角越小,角分辨率越小,激光雷达形成的点云越密。激光雷达的分辨率自然会更高。
当点云均匀分布在视场内时,我们可以认为角分辨率能直接反映出激光雷达的分辨率。它们之间存在以下换算关系:
横向像素点=(水平视场角 / 水平角分辨率)+1
纵向像素点=(垂直视场角 / 垂直角分辨率)+1
以视场角为 120° x 25.4° 的 AT128 为例,其水平与垂直角分辨率分别为 0.1° 和 0.2° (取小数点后一位),可以算出其全局分辨率为 1200 x 128。
对于点云分布不均匀的激光雷达,其角分辨率也不是全局一致的,ROI 区域内的角分辨率更小,通常被称为「最佳角分辨率」。一般来说,激光雷达的产品说明书会把不同区域的角分辨率都列出来,以便于用户参考。但在宣传的时候,有些厂商可能会把「最佳角分辨率」当作产品平均角分辨率来偷换概念,给人一种全局都很密的错觉,实际上只要拿点频数来算一算,就能得知其真实的分辨率了。
线数
关于激光雷达,还有一个指标也常被提到,那就是线数,比如 96 线,128 线激光雷达。线数其实对应了激光雷达纵向像素点的数量,因为历史上传统机械式激光雷达的水平方向点云更密、整体看起来像是一条一条的“线”。线数这个说法直到今天仍然被广泛使用。
但正如前文所述,作为一个仅反映纵向像素点、不反映横向像素点的参数,线数并不能一概而论地全面代表激光雷达的分辨率。
当然,如果在其他参数差不多的情况下,垂直方向的线数肯定是越多越好,有兴趣的可以参考之前的这篇文章:《激光雷达线数越多越好吗?》。
激光雷达迈入2K高清感知时代
总结一下,其实全局分辨率、角分辨率、点频这三个指标都可以用来形容激光雷达的分辨率,点频这个指标更加通用、客观,三个指标之间可以互相换算;而帧率这个指标是可调的,一般有 10 Hz、20 Hz 两种选择。
随着智能驾驶行业的发展,高性能 ADAS 激光雷达分辨率的上限也在逐渐提升,为智能驾驶带来了更为广阔的可能性。
比如禾赛今年 1 月发布的超高清超远距激光雷达 AT512, 它的全局分辨率是 2400 x 512,以通常大家对屏幕清晰度的标准来说,已经达到了 2K 超高清,让汽车看到更清晰的三维世界。AT512 总点频高达 1230 万点/秒,将激光雷达带入了千万级点频时代,相比上一代产品分辨率提升了 8 倍,同时最远测距达到了 400 米,更早地探测到路面细节,让智能驾驶更加安全的同时,能获得更加舒适的体验。
展望未来,随着技术的持续进步,我们有理由相信,智能驾驶将会更加精准、安全,为人类出行带来前所未有的新体验。
审核编辑:黄飞
-
分辨率提升20倍!Aeva推出全球首款“相机级分辨率”激光雷达2022-02-11 16016
-
Ouster发布两款新型高分辨率激光雷达传感器,为自动驾驶提供更安全的技术2020-01-14 1823
-
Ouster发布超宽视场角激光雷达,提供更丰富的分辨率选择2020-01-29 4227
-
激光雷达分类以及应用2017-09-19 8924
-
常见激光雷达种类2017-09-25 14032
-
一文详解激光雷达核心指标,实用性和可靠性第一2018-02-02 8895
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21295
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3196
-
世界上第一台摄像机水平分辨率的4d 激光雷达2022-02-25 8135
-
激光雷达与相机的融合 分辨率达300线以上2017-12-13 6688
-
岭纬科技打造的高分辨率固态激光雷达分辨率高达480~720线2020-10-26 6145
-
新款激光雷达实现最低成本、高分辨率的远程探测2021-03-29 5223
-
激光雷达是什么,激光雷达的应用说明2022-06-20 26773
-
激光雷达|什么是线数?激光雷达的线数是越多越好吗?2022-12-19 8787
-
Ouster全新激光雷达传感器问市,可使用128通道分辨率2023-04-06 1952
全部0条评论

快来发表一下你的评论吧 !
