

使用电感器改进现有设计
MEMS/传感技术
描述
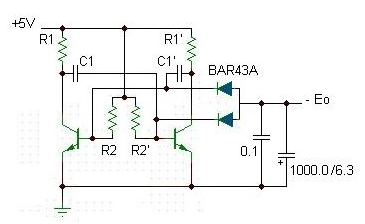
以下是图 1中先前 DI的电路:
图 1简单的本地低噪声电压转换器,可在需要简单的低电压负电源时使用。
用您独特的设计让工程界惊叹: 设计理念提交指南
它很简单,并且可以通过非常快速的更改来提高其效率。如果固定 R1 和 R1′ 的值(使输入功率也固定),则输出电压将在图形 Eo=Eo(R2) 上出现极值。为了便于实现该极值,可以将图 1 的电路修改为图 2所示;在这里,您可以使用单个电位计 (R2) 更改 R2/R2‘ 的值。
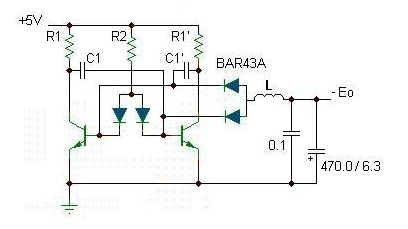
图 2在图 1 的输出中添加电感以提高转换器效率。
但主要的改变是在输出端增加了电感 L。相当低的电感值(0.1…1.0 mH)就足够了。(这个低值可能与多谐振荡器的低频相悖,低频小于 1 KHz。)
负输出电压随着电感的增加而缓慢增加:从-0.36 V @ L=0.1 mH 到-0.4 V @ L=1 mH。
主要优点是输出电流(电压)增加约 25%。图 1 中的电路的输出电压为 -0.31 V,而图 2 中的电路可以在相同负载 (910 Ω) 下提供超过 -0.39V 的电压。
这种增加是由于……嗯……我们会在评论中看到解释……
第二个改进是输出噪声:相同的电感 L 显着降低了输出噪声 - 图 2 中的输出电容器的容量只有一半,但此处的输出噪声幅度却减半。
元件值为:L=0.1…1.0 mH,R1=R1’=5.6 k,R2 =~22 k,C1=C1‘=0.1 ?F。输出电容器应具有低阻抗。
该电路在 +5 V 时消耗的电流小于 1.5 mA,并在 910 Ω 负载上产生超过 -0.39 V 的电流。个电路(“光电池使运算放大器实现真零输出”)具有相同的输出电流,消耗的功率大约是原来的 10 倍,但其输出噪声大约是原来的 100 倍。
然而,所有这些电路都可能存在一个问题:它们会产生低电压,这对主机系统来说并不重要,但如果电压以某种方式下降,结果就会失真,而这一点可能会被忽视。
为了确保检测到该电压的任何下降,可以使用图 3中的电路。它对于监控任何双电源系统中电源的一致性非常有用。
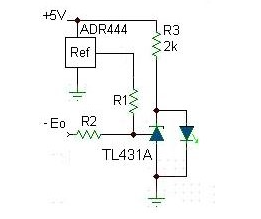
图 3确保检测到任何电压降的电路,这可能会导致图 1 和图 2 中转换器的结果失真。
绿色 LED 指示“电源良好”,可用作整个主机系统的“开机”指示灯。电阻R1、R2至少应稳定1%。当输出电压增长到 e= -20…-100 mV 时,LED 应该亮起,具体取决于您的缓冲器参数。
对于 R1、R2 值,令:
v1 = Vref + |e|,
v2 = 2.5 + |e|,则
R1 = R2 * ((v1 / v2) – 1)
对于给定参考和 e = 50 mV:
R1 = 0.63 * R2,
例如,R1=38.8k,R2=62k。这些值可能需要进行一些调整,因为它们的总值不能太低——应谨慎使用输出电流。当通过分压器的电流非常低时,TL431的输入电流的影响要大得多,因此在这种情况下建议进行一些调整。,可以使用输出电压大于2.5V的任何其他基准,但应重新计算R1、R2的值。
-
电感器入门2009-04-10 5630
-
电感器 车载用电源系统薄膜电感器的开发与量产2016-05-06 3704
-
射频电感器的选择参数2019-06-28 2061
-
射频电感器的阻抗匹配2019-07-05 3087
-
新款小型商用电感器有哪些特点?2021-06-16 2169
-
电感器的工作原理2021-08-03 5193
-
常用电感器的类型及用途2019-08-05 14653
-
为什么要使用电感器?2021-05-15 3353
-
电感器结构的原理及电感器基础知识的分享2021-04-14 4662
-
什么是电感器,电感器的常见知识汇总2021-04-27 4438
-
电感器市场供不应求,电感器大厂取消价格折让2021-10-28 1121
-
电感器应用电路的详细讲解(一)2021-07-11 4118
-
开关电源用电感器的选择分析2021-09-27 1151
-
常用电感器的结构2023-05-29 1775
-
如何在电路中使用电感器?2023-06-18 3654
全部0条评论

快来发表一下你的评论吧 !
