

无人机摄影测量点云分类方法与技巧解析
军用/航空电子
描述
如何对无人机摄影测量点云进行分类
难点1
--噪点很多
--方法:
-“分类/表面点”去除噪点并保留局部表面点
-“工具/平滑点”与“平滑XYZ”平滑表面
难点2
--高点密度使算法运行缓慢
--方法:
-抽稀点将大多数点停用为不必要的密度等级
-使用剩余的活动点运行分类步骤
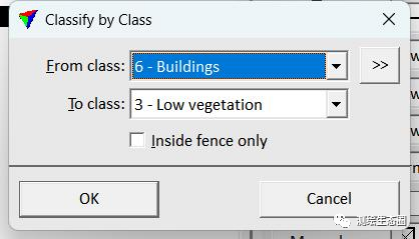
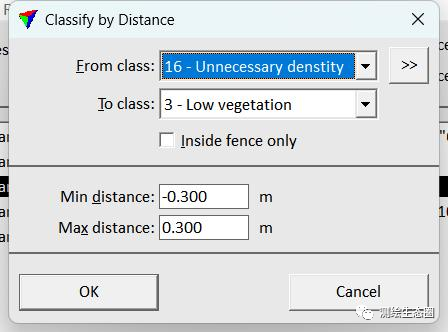
-对活动点进行分类后,从最近的活动分类点复制分类并分组分配到不必要的密度点
Terrasolid开发了一种新方法,该方法在计算距离属性时包括植被指数信息。
植被指数将摄影测量点云中的植被点与地面点区分开来。TerraScan中实施的新处理策略克
服了经典地面分类算法的局限性,为处理基于无人机的摄影测量点云提供了新的解决方案。
利用植被指数改进地面分类与传统方法相比,TerraScan中的其他处理步骤包括:
1、计算每个点的植被指数距离
点的植被指数值与极限的差异程度
2、平滑距离值
通过平均附近区域内的值来降低噪音
3、在地面分类例程中使用距离评级
植被点不太可能包含在生成的地面类中
处理流程:
1、数据准备
2、按位置排序点
-提高计算效率
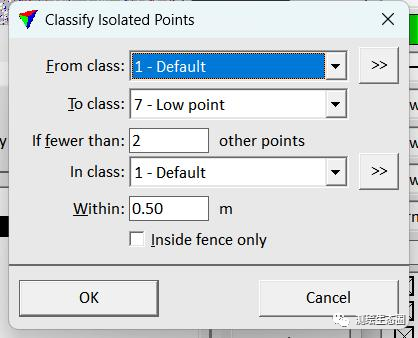
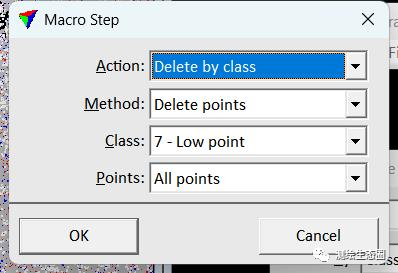
3、分类和删除隔离点
-对表面点进行分类
-减少噪音
4、平滑点
-减少点对点噪音
5、抽稀点
-减少点数,提高处理效率
6、对硬表面进行分类
7、对潜在地表点进行分类
算法介绍:
01_ground.mac
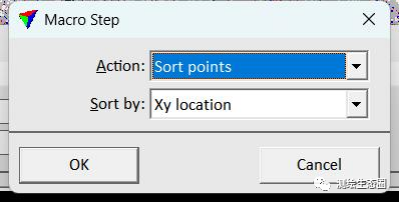
排序——排序命令根据所选属性对加载的激光点进行排序。
按xy的位置——通过增加xy位置按地理顺序对点进行排序。对于依赖点云中点之间的几何
条件的过程,这是建议的顺序。特别是对于摄影测量点云,强烈建议使用此顺序,以加快许
多自动化过程。
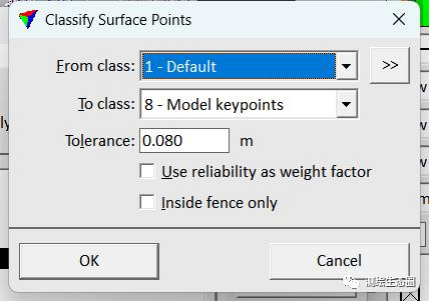
表面点——表面点算法对适合局部平滑表面的点进行分类。它对任何方向的平面表面上的
点以及圆角表面上的点进行分类。该算法可用作噪声点云(如摄影测量点云)中地面、建筑
物屋顶或墙壁分类的预分类。
对表面点进行分类后,在运行其他分类算法之前,使用xyz方法对点进行平滑处理可能会很
有用。
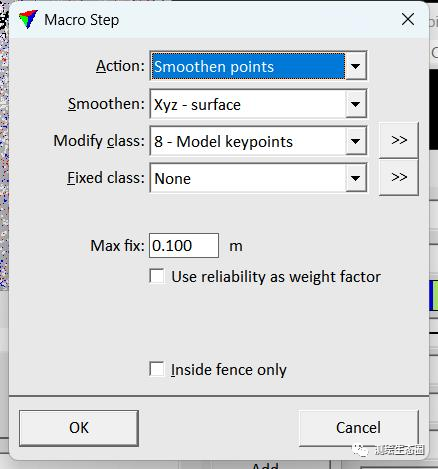
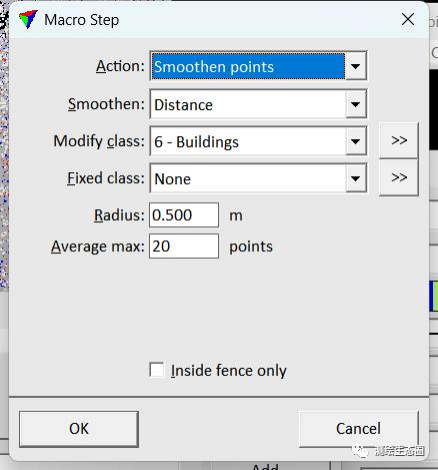
平滑点——平滑点命令可用于平滑激光点的属性。
平滑点命令可用于平滑激光点的属性。这些点根据其最近的邻点进行修改。这导致点云的外
观更加均匀。可以应用以下方法:
•Xyz曲面-3D平滑过程,使用25-30个相邻点来拟合2度曲面,在XYZ中将点移动到
更靠近此拟合曲面的位置,垂直曲面上的点沿XY方向平滑,水平曲面上的点沿Z方向平
滑。
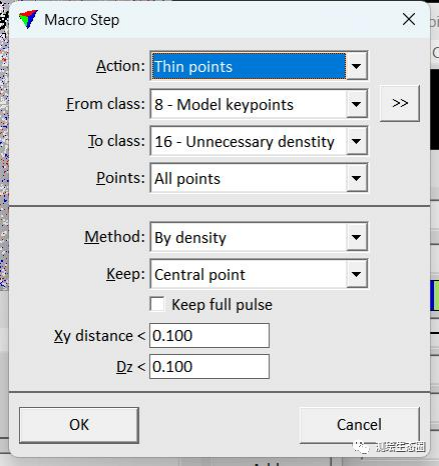
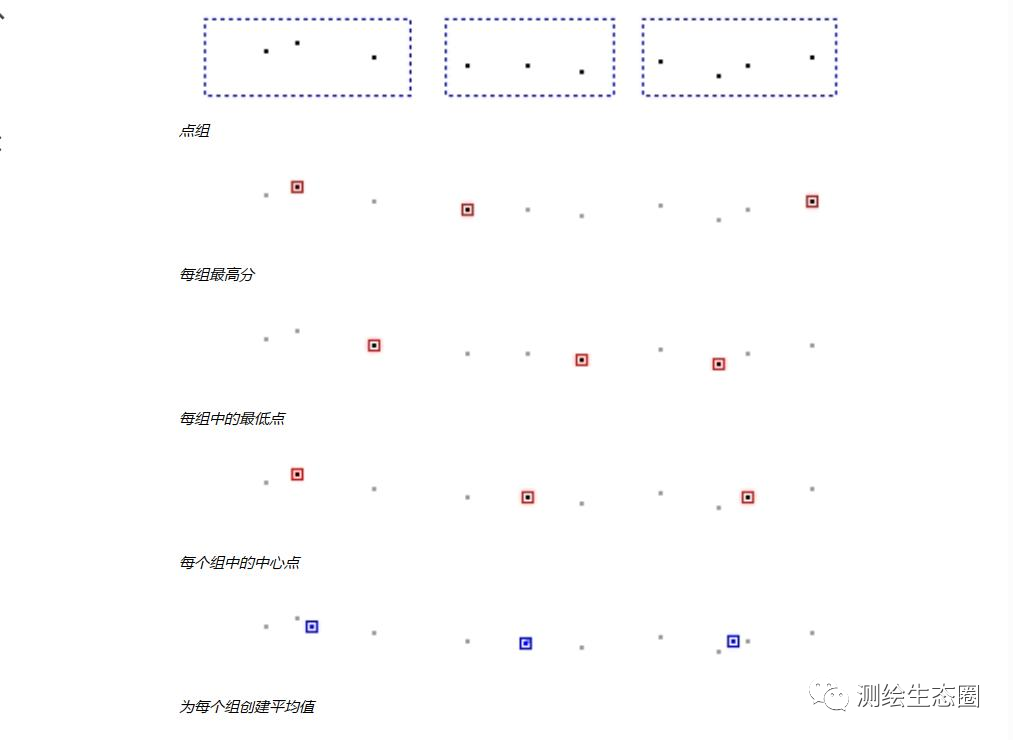
抽稀点——细点命令通过删除一些彼此靠近的点或细化给定大小的网格像元来减少不必要
的点密度。
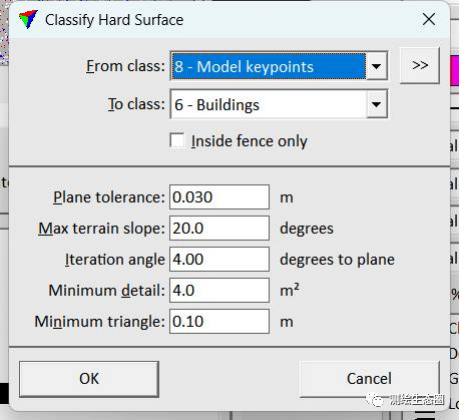
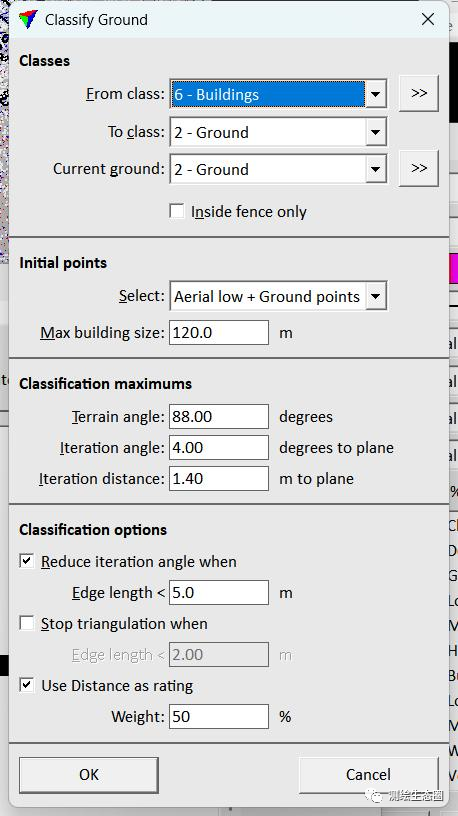
硬表面点——硬表面例程通过迭代创建三角化表面模型来对地面点进行分类。该例程对主要中间表面点进行分类。它最适合在移动激光数据集和主要存在硬地面表面(例如铺砌道路或其他区域)的数据集中对地面进行分类。要在大部分地面位于自然地形的机载数据集中对地面进行分类,请使用地面例程而不是硬表面例程。如果需要对自然地形和铺砌区域进行分类,则可能需要在自然/铺砌区域周围绘制面,以便将面内的例程应用于其他例程,并对其余数据应用其他例程。
与地面点算法相比,硬表面例程对点云中的低误差点不敏感。因此,在使用此例程对地面进行分类之前,无需运行任何低点分类。
硬表面例程渴望对形成局部平面的点进行分类。例程设置中给出的平面容差决定了点必须与平面的拟合优度。这是控制将多少个点分类到地面类中的主要参数。
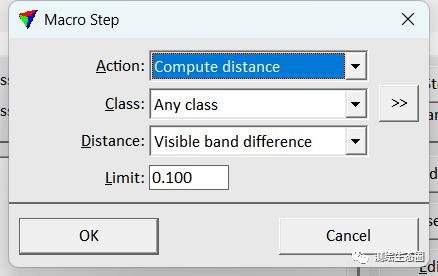
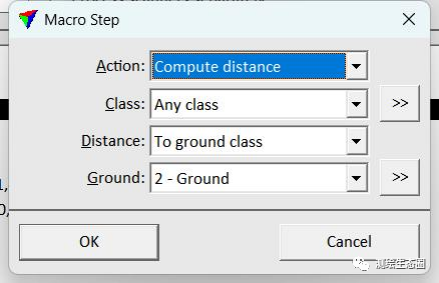
计算距离——内置植被指数归一化和视觉波段差异。这需要为点存储真彩色(视觉波段差)和额外的红外颜色信息(归一化差值)。距离值表示点属于植被(较大的正值)或不属于植被(较大的负值)的可能性。距离值的范围介于-1和+1之间。植被指数距离值可以支持摄影测量点云的地面分类。
平滑点算法:
距离-具有给定数量的相邻点的每个点的平均距离值。这对于减少从颜色信息派生的植被指数值的噪声可能很有用。因此,结果更多地表示噪声较少的区域的真实植被模式。这也可以改善摄影测量点云中的地面分类,因为它可以得到距离值的支持。
02_features.mac
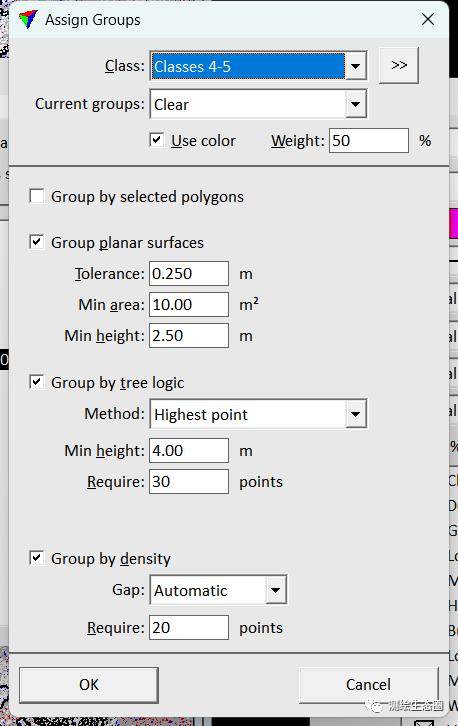
“分配组”--命令将组编号分配给一个或多个类的点。分组基于不同的方法完成,例如平面
拟合、分水岭算法或点之间的3D间距。
组分配依赖于与地面值的距离和法线矢量信息。在启动命令之前,必须为点计算两者。对加载点使用“计算距离”命令或“计算距离”宏操作并设置“比较=地面”来计算距离值。对加载点使用“计算法线向量”命令或“计算法线向量”宏操作来计算法线向量方向。组号可用于点的可视化和点分类。有各种依赖于分组的自动分类例程。群组工具箱中的工具可用于手动操作群组。
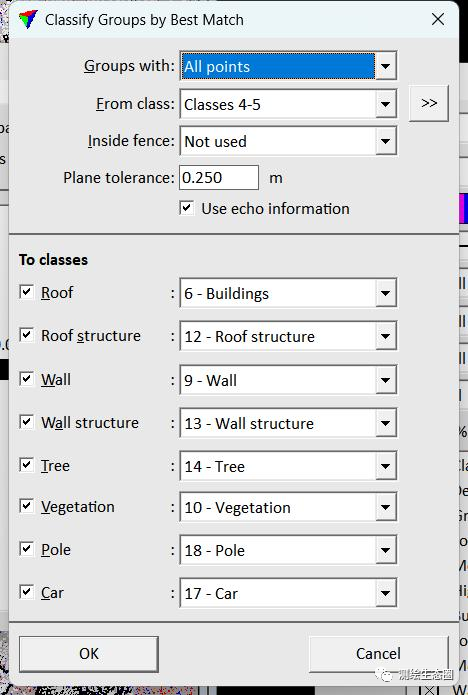
通过最佳匹配——根据对象类型将点组分类为多个类。对于每个组,例程测试该组表示对象(如建筑物屋顶、墙壁、树木、杆子等)的概率。该组被归类为获得最高概率的对象。
03_copyclasscloseby.mac
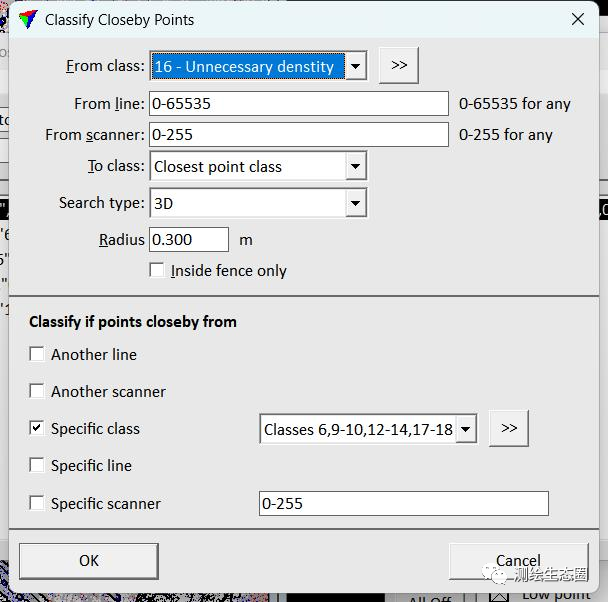
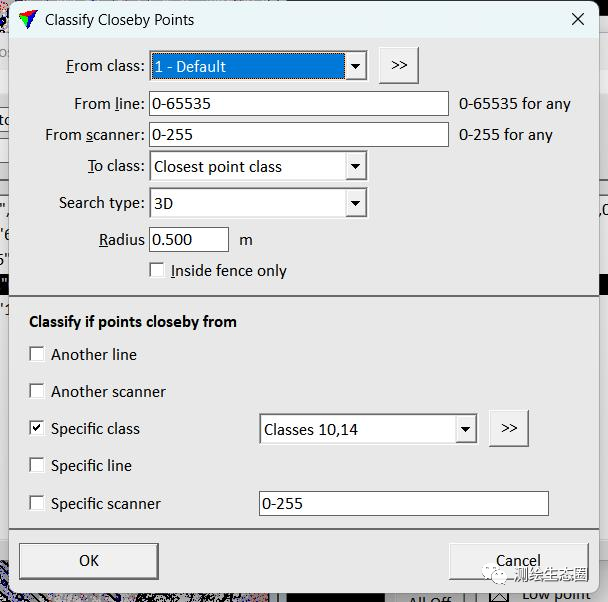
应用“邻近点”算法时,以便使用临时点类中的点使对象类增密化
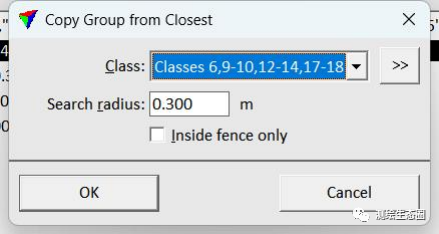
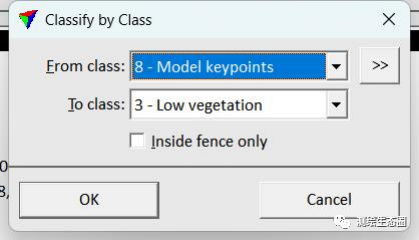
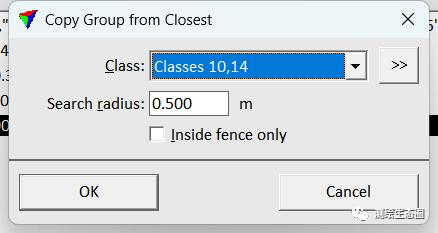
“从最近的点复制”--会将组编号分配给尚未具有组分配的点(非编组点)。它从给定类中最近的分组点复制组号。
复制组号对非常密集的点云的组分配和分类可能很有用。
摄影测量点云地面分类汇总
1、按 XY 位置排序点
2、对主要表面进行分类
3、在步骤 2 中找到的表面点的平滑 XYZ。
4、按密度抽稀步骤 2 中找到的表面点,将中心点保持在合理的 xy 和 z 距离内(取决于数据中的噪声水平)。曲面类中的其余点现在表示更干净的曲面。
5、如果颜色信息有噪点,对完全白色的点进行分类。
6、从步骤 4 之后保留在曲面类中的点对硬曲面进行分类。使用允许曲面上某些点变化的平面度容差。
7、 使用视觉波段差(RGB 可用)或归一化植被指数(RGB + 红外可用)计算在步骤 6 中找到的硬表面点的距离。您可以通过按植被指数显示品脱云并使用极限设置来检查良好的极限值。
8、平滑距离,以减少从颜色信息得出的植被指数值中的噪声
9、如上所述,对地面进行分类并利用使用距离作为评级设置。
审核编辑:黄飞
- 相关推荐
- 热点推荐
- 无人机
-
无人机云台是什么2021-09-01 10578
-
无人机云台电机是什么电机?2021-05-25 4357
-
无人机低空摄影测量技术的工作流程是怎样的2020-08-18 5090
-
BIM与GIS结合—无人机倾斜摄影三维建模方法2020-06-19 3313
-
无人机的基础常识要知道2020-06-08 2203
-
无人机倾斜摄影技术的标准2020-06-03 4181
-
基于无人机的分类2017-10-17 1574
-
天途航测无人机受关注,倾斜摄影技术遥遥领先2017-06-12 3837
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11645
-
无人机航拍倾斜摄影案例2017-02-15 1135
-
无人机介绍2017-02-09 3054
-
没想到无人机对摄影的影响居然是。。。。2016-06-03 3195
-
【云智易申请】智能无人机通信2015-08-07 2941
-
无人机数字摄影测量系统的设计和应用2009-07-11 1777
全部0条评论

快来发表一下你的评论吧 !
