

机操作巡检机器人视觉定位抓取技术步骤
机器人
描述
随着科技的不断进步和工业智能化的加速推进,巡检机器人已经成为现代工业生产和设施管理中不可或缺的重要组成部分。而在巡检机器人的发展过程中,视觉定位抓取技术的应用日益广泛,为智能化巡检运维提供了全新的可能性。
当巡检操作机器人精准抓紧并旋转开关时,我们不禁想知道:它是如何做到的呢?原来巡检机器人是通过结合先进的视觉传感器技术、机器学习算法和智能控制系统,不仅可以准确地识别和定位目标物体,还能够实现精准的抓取操作,为巡检运维领域带来了巨大的变革。
操作巡检机器人视觉定位抓取技术通常需要以下步骤:
1.传感器配置与校准:
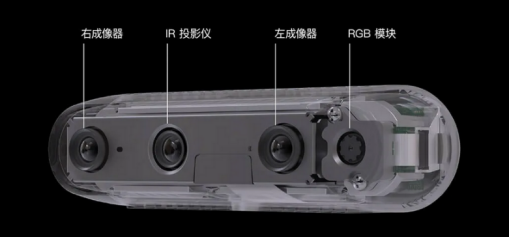
将适当类型的视觉传感器(如摄像头、深度相机等)配置到巡检机器人上,并确保传感器的位置和角度安装正确。进行传感器的校准工作,确保传感器能够准确捕获目标物体的图像或点云数据。
2.目标检测与识别:
使用目标检测和识别算法对传感器捕获的图像或点云数据进行处理,识别出需要进行巡检或抓取的目标物体。确定目标物体的位置、形状、大小等特征信息,为后续的定位和抓取提供基础数据。
3. 姿态估计与路径规划:
基于目标物体的位置和特征信息,使用姿态估计算法确定目标物体在三维空间中的姿态和方向。利用路径规划算法确定机器人的移动路径,以及抓取装置的运动轨迹,确保抓取的准确性和稳定性。
4.控制和执行抓取操作:
根据路径规划的结果,控制机器人的移动和抓取装置的操作,实现对目标物体的精准抓取。在抓取过程中,通过视觉反馈和传感器数据实时监控抓取状态,并进行必要的调整和修正,确保抓取操作的成功完成。
5.后续处理与数据记录:
对抓取过程进行后续处理,如记录抓取结果、保存相关数据等。根据需要,将抓取的目标物体进行分类、标记或放置到指定位置,完成巡检任务的相关操作。
开关柜带电操作机器人:
开关柜带电操作机器人用力传感器技术为协作机器人行业提供了更安全智能的交互体验、更高的适配性能,以及更低成本的场景化应用模式。
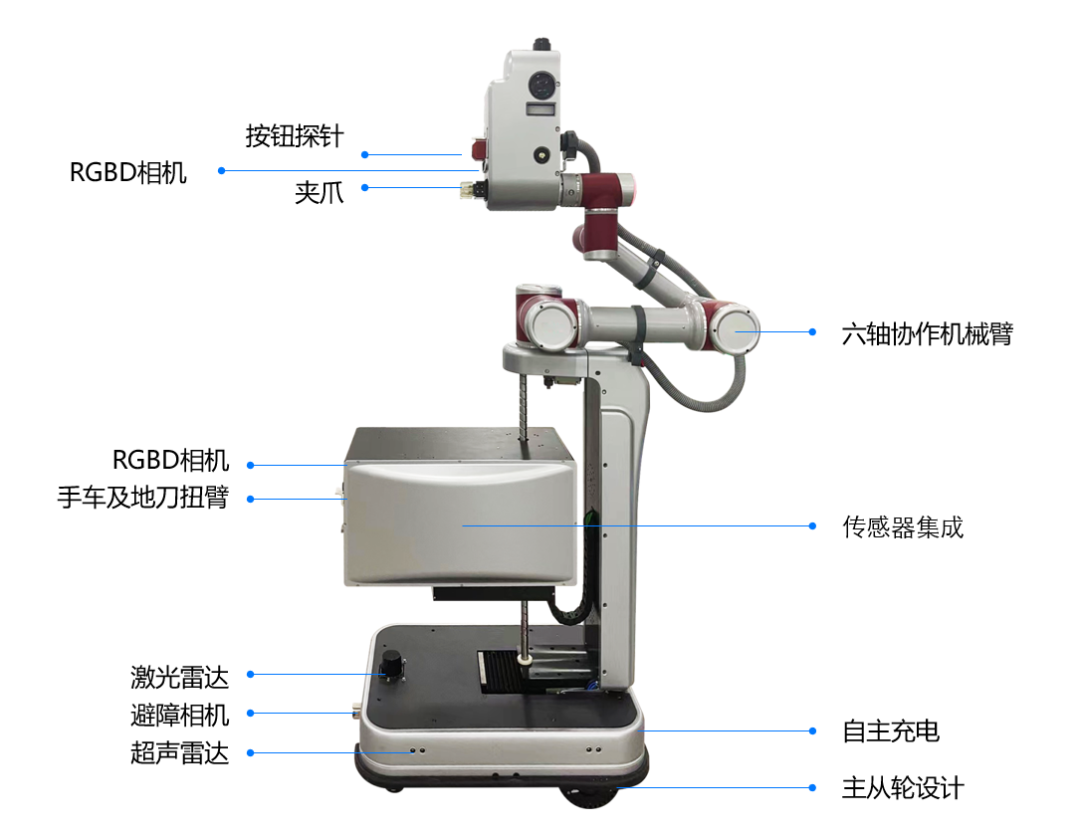
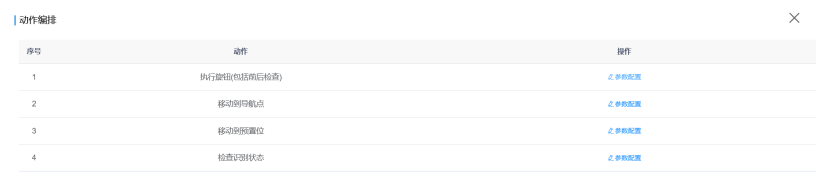
包括六轴协作机械臂、大扭力中台机械臂、末端执行器和运动底盘四大部分,核心功能为在配电房内对开关柜进行典型作业票操作,替代人工作业。为了实现对多种操作票和不同类型开关柜的操作,设计了流程化的动作编排功能,可将机器人的各项功能拆分为独立的动作单元,可自由灵活组合配置,形成不同的操作流程。
主要功能:倒闸操作、压板投退、紧急分闸操作、线路保护测控装置操作、可见光检测、红外检测、局放检测、压板状态检测、信号灯检测、开关检测。
关键技术:
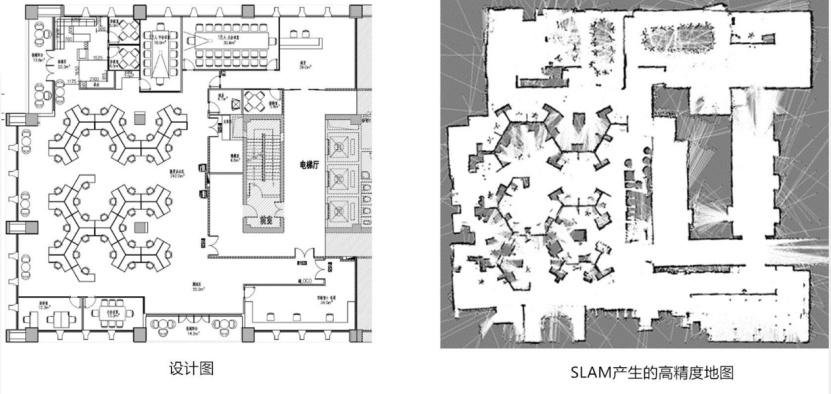
1) 无人自主导航
超维科技智能操作巡检机器人配备先进的激光雷达、SLAM算法、IMU模块、RGBD深度相机、超声波传感器等一起实现SLAM建图、路线规划、自主导航、自动避障的功能。导航精度误差±5cm,通过增加 RGBD 摄像头模块,可以有效解提升机器人的主动避障能力,对高于激光雷达的常见障碍物进行避障处理。
2) 柔性精准操作
机器人搭载了6自由度协作机械臂,并且在执行末端设计了多种执行器模块来满足不同场景的操作需求。包括:旋钮夹爪模块、按钮探针模块、大扭矩刀闸旋转模块、 RGBD深度视觉模块
3) AI智能识别
机器人配备了强大的边缘智能AI计算核心,可以执行目标监测、实例分割、目标分类、图像配准等多种AI智能算法,实现对开关、指示灯、OCR字符、数字仪表、指针仪表等装置的状态识别和数值读取。
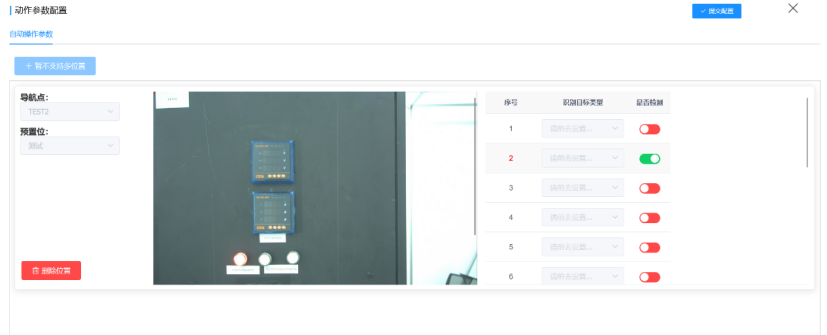
4) 智能动作编排
操作机器人具有复杂的动作逻辑,和灵活的操作能力,所以我们设计了灵活的智能动作编排功能,来实现操作机器人未来操作的可扩展性。
5) 机器人联合巡检平台
通过建立室内巡检智能操作机器人平台与数据中心发展模式相配套、相适应的IT运维一体化管理体系,打通数据孤岛,对配电房室内信息进行有效的整合,给配电发的运维提供真实有效的数据。
随着技术的不断演进和应用场景的不断拓展,操作巡检机器人视觉定位抓取技术将在未来发挥更加重要的作用,为推动产业升级、提升生产效率和保障生产安全贡献更多力量。
审核编辑:黄飞
-
基于视觉的机器人抓取系统设计2023-08-19 3369
-
如何实现拥有强悍功能智能巡检机器人2023-04-12 1017
-
工业机器人与视觉实训平台介绍2021-07-01 1967
-
四元数数控:工业机器人使用机器视觉系统的原因2021-04-29 1460
-
如何管理园区巡检机器人,只需5个简单的步骤2021-02-16 1874
-
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 2129
-
抓取作业机器人3D视觉系统的设计2019-07-25 10123
-
机器人视觉系统组成及定位算法分析2019-06-08 3815
-
LabVIEW 的Tripod 机器人视觉处理和定位研究2019-06-01 2973
-
工业机器人智能发展:视觉和触觉感应简化任务2018-10-26 2637
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8389
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
全部0条评论

快来发表一下你的评论吧 !
