

请问KUKA机器人的Mada文件怎么配置呢?
描述
进入正题
工具以及原料
ServogunTC41_Diakont_380V.afc&WorkVisual 6.0

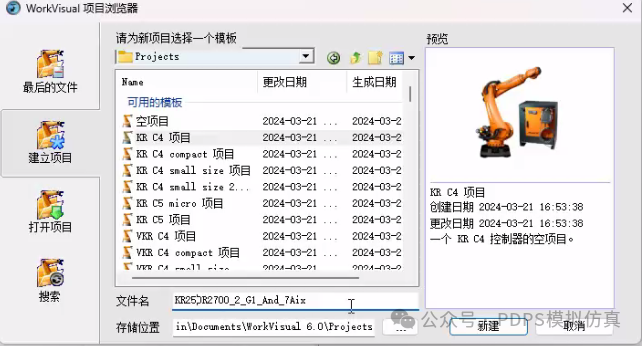
STEP1:打开WorkVisual 6.0,新建一个空项目命名KR250R2700_2_G1_And_7Aix
STEP2:右击控制系统,选择对应控制器的版本号,确定,示例:8.3.14

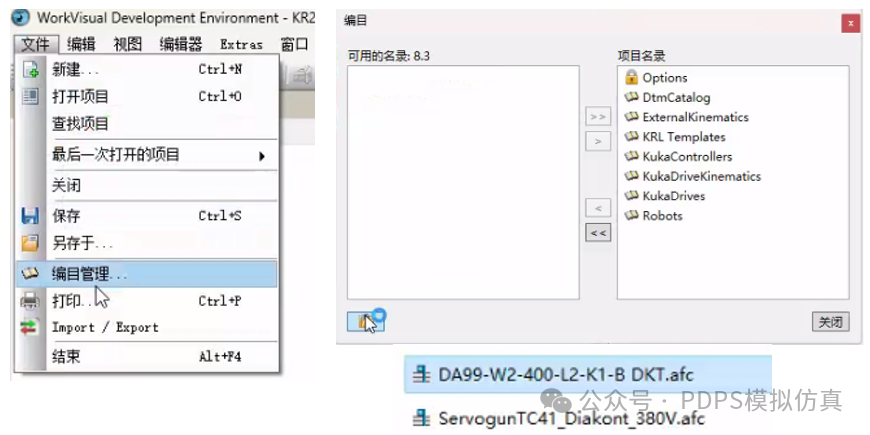
STEP3:文件-编目管理,添加焊枪.AFC文件,示例:PW焊枪
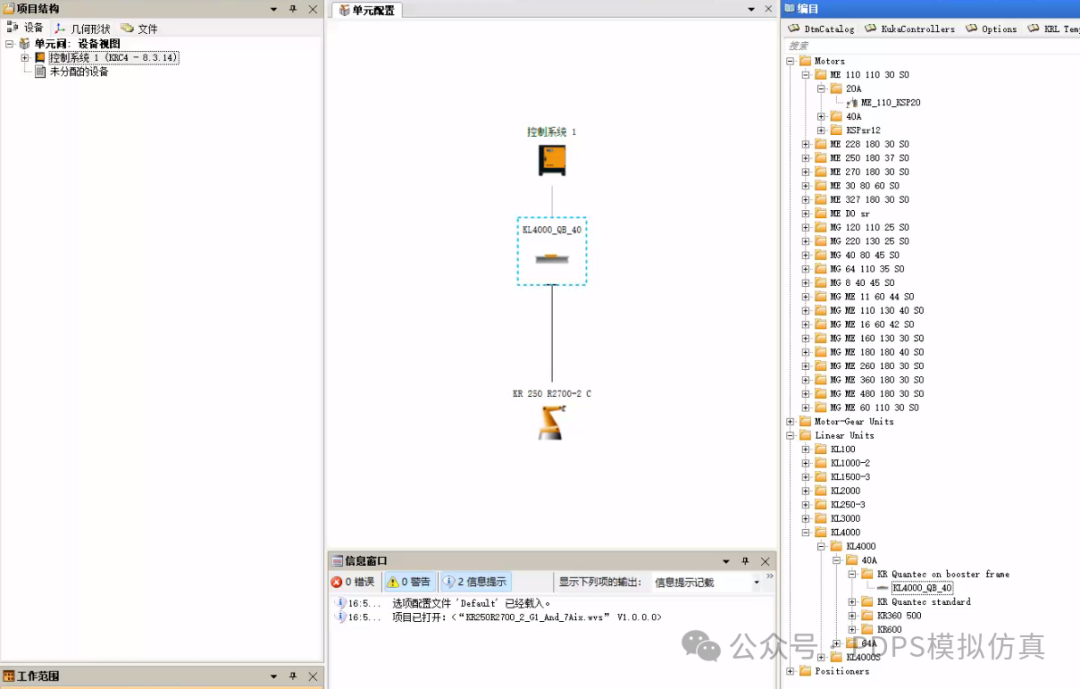
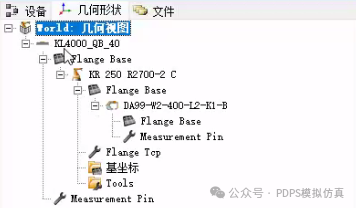
STEP4:编目窗口-Robots,选择对应机器人型号,鼠标拖到控制系统1栏中

STEP5:编目窗口-ExternalKinematics,选择7轴的型号,鼠标拖到控制系统1栏中,本项目用到的是KL400-QB-40
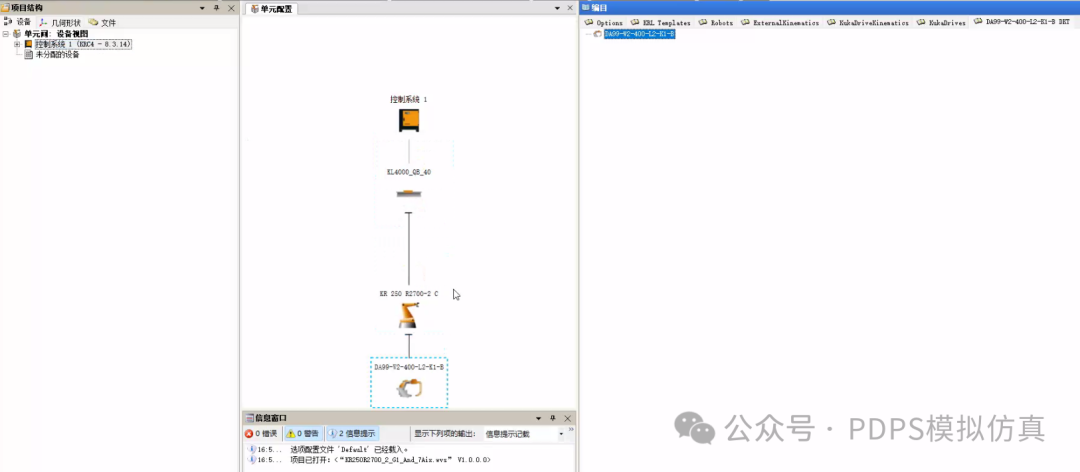
STEP6:编目窗口-DA99-W2-400-L2-K1-B DKT,选择DA99-W2-400-L2-K1-B,鼠标拖到控制系统1栏中
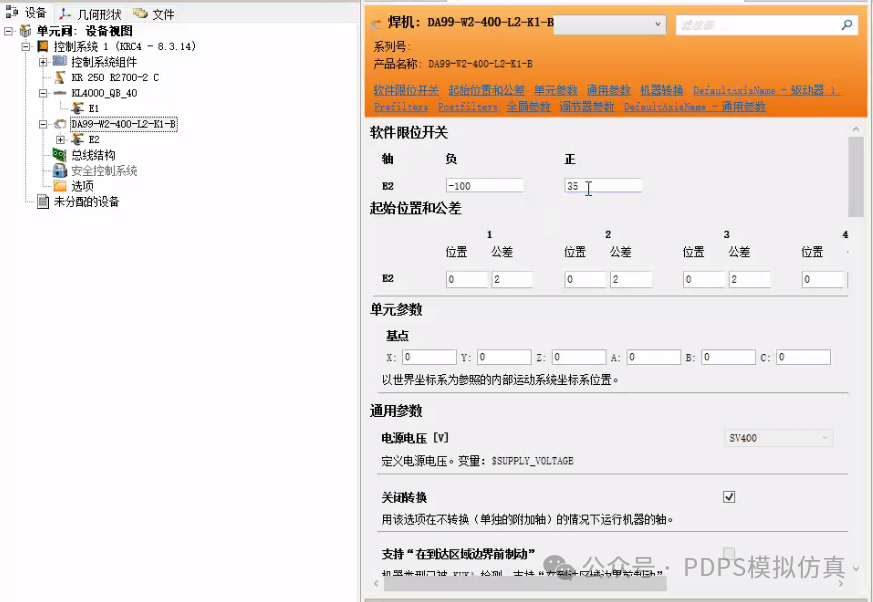
STEP7:配置焊枪的参数,极限位(焊枪开口范围)以及传动比
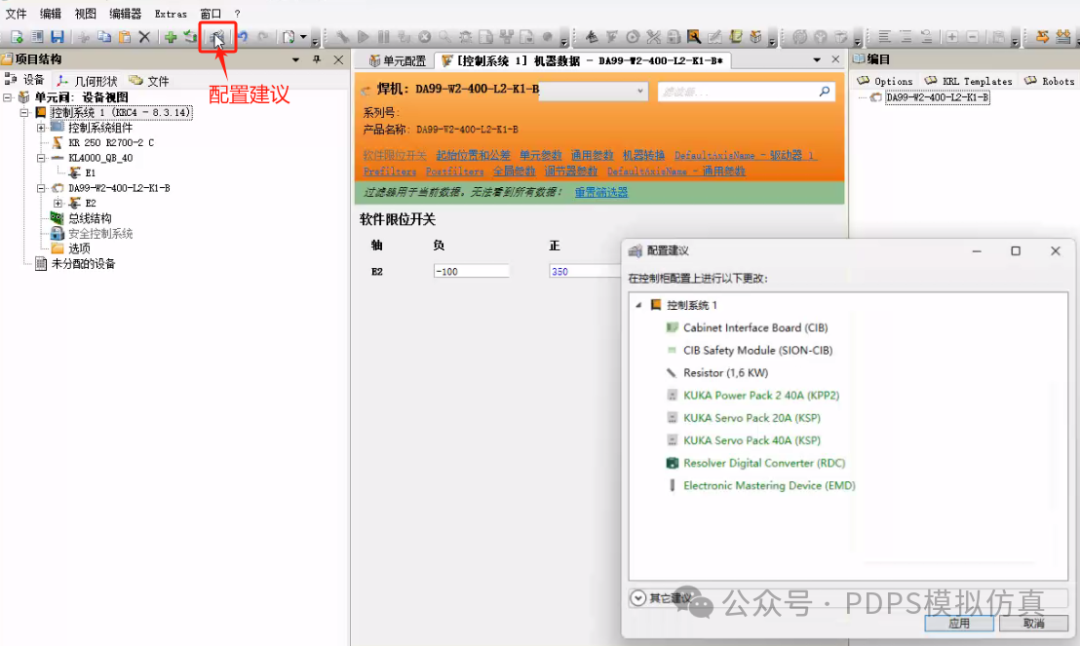
STEP8:选中控制系统1,点击配置建议,点击应用
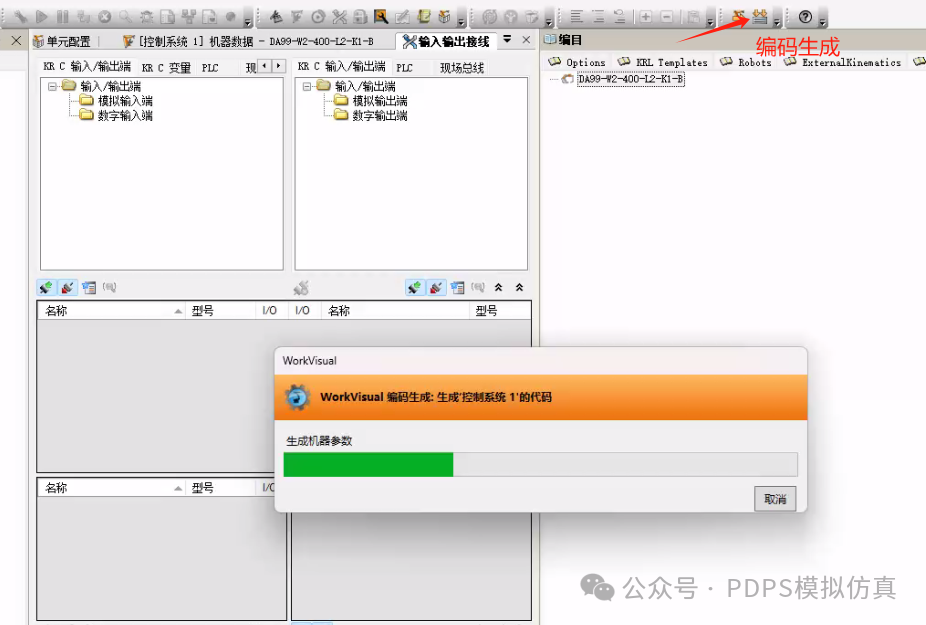
STEP9:点击编码生成按钮,系统会自动配置
STEP10:文件-Import/Export-导出文件-选择文件的目录即可
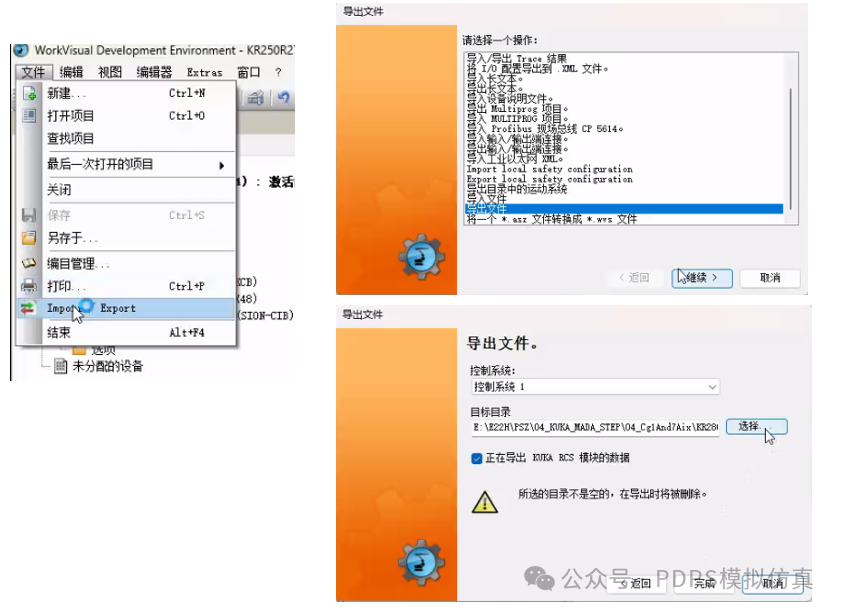
如下:
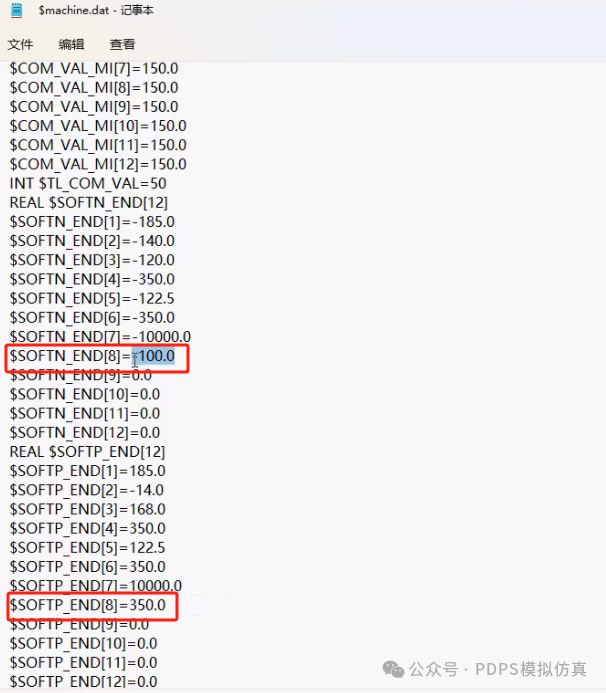
STEP11:检查mada,打开.DAT文件,查看焊枪伺服值在所设置范围内
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
KUKA重型机器人2015-02-03 8266
-
求KUKA机器人控制柜三维模型2016-04-18 6410
-
KUKA机器人问题解答2019-07-15 2588
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12317
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10869
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7974
-
工业机器人组成结构相关资料分享2021-07-05 2673
-
库卡机器人MGV电源模块维修2021-09-08 1821
-
KUKA机器人伺服驱动模块维修2021-09-17 1848
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3850
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2230
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 1901
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1715
-
Kuka机器人配置Profinet通讯网关HT3S-PNS-ECS2024-06-13 1909
-
KUKA机器人编程说明(英文)2025-03-07 451
全部0条评论

快来发表一下你的评论吧 !
