

机器视觉中如何选择相机与对应的镜头
工业控制
描述
相机和镜头是计算机视觉中重要的组成部分,合适的相机和镜头决定了系统的好坏。但是大部分的计算机视觉工程师对如何选择工业用相机和合适的镜头上犯了难。本文主要介绍如何选择相机与对应的镜头。
相机成像原理
学过初中物理的同学肯定不会忘记小孔成像。
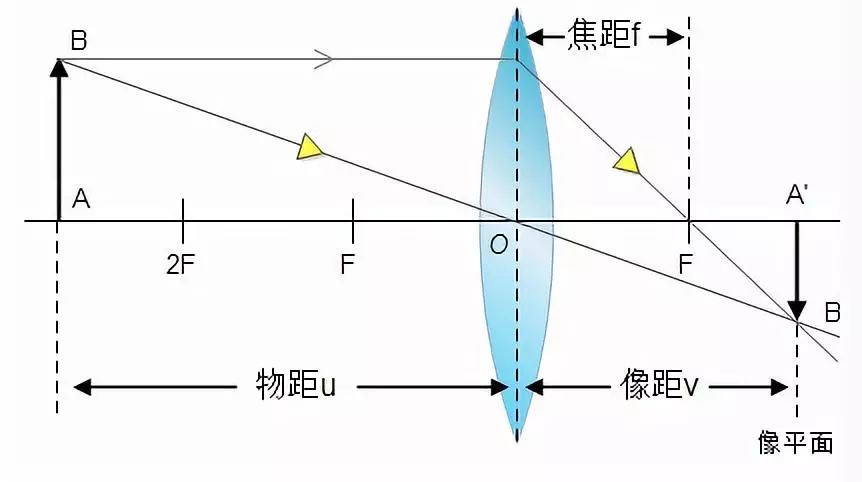
凸透镜成像有几个关键的点需要记住:
1、物距大于2倍焦距以外,实像;
2、物距等于2倍焦距,实像;
3、物距在1到2倍焦距之间,实像;
4、物距等于1倍焦距,不成像;
5、物距在1倍焦距以内,虚像;
相机的选择
相机选择主要包括两个方面:线阵相机的选择和面阵相机的选择。首先,不管是线阵相机,还是面阵相机,都需要事先指导和相机有关的一些参数。
1、分辨率(这里说的是相机传感器成像大小):例如1024pixel x 1024pixel;
2、帧率(面阵相机):每秒能拍摄的图像张数;
3、行频(线阵相机):每秒采集的图像行数,实际上也是每秒拍摄的张数;
4、像元尺寸:传感器上一个物理像元的尺寸,例如:7.4um x 7.4um;
5、传感器尺寸:像元尺寸乘以分辨率就是传感器尺寸;
6、焦距:指平行光入射时从透镜光心到光聚集之焦点的距离;
7、物距:物体到透镜光心的距离;
8、光学放大倍率:一般的情况下是固定值,一般就是0.35倍-2.25倍或者是0.75倍-4.5倍;
9、工作距离:也就是物距;
10、曝光时间:为了将光投射到照相感光材料的感光面上,快门所要打开的时间;
11、视场角:最边缘的入射光线在镜头中心组成的角度
12、靶面尺寸:传感器成像的大小;
13、精度:传感器一个像素所代表的实际物体的尺寸是多少;
14、景深:在摄影机镜头或其他成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围
线阵相机的选择
线阵相机适合于高速运动的物体,一般建议40km/h运动的物体可以采用线阵相机拍摄。
1、确定成像物体的尺寸:例如 AxB(单位:mm);
2、工作距离暂定为C(单位:mm)
3、精度D(单位:mm/pixel)
4、速度为V(单位:mm/s)
5、景深E(单位:mm)
那么相机必须具有的采集速度为:V/D(用来确定行频)
相机最小的成像尺寸为(假设是以A作为成像宽度):A/D(用来确定相机的成像尺寸)
有了这两个参数,基本上就可以确定相机的型号了,例如:行频为55k, 尺寸为2048x1,其他满足要求即可。
面阵相机的选择
面阵相机的选择要稍微复杂一点,适合低速运动的物体。一般建议40km/h。同样需要下面这些参数:
1、确定成像物体的尺寸:例如 AxB(单位:mm);
2、工作距离暂定为C(单位:mm)
3、精度D(单位:mm/pixel)
4、物体运动速度为V(单位:mm/s)
5、景深E(单位:mm)
首先,成像的视场必须大于物体的物理尺寸,例如,市场定为2Ax2B(尽量保有余量)
相机水平成像尺寸:A/D;垂直成像尺寸:B/D;根据计算结果,就选择大于这两个数据的相机尺寸axb;
现在考虑曝光时间,因为这个关系到成像有没有拖影;
曝光时间 < D‘/V(当相机的成像尺寸确定后,重新确定精度,假设为D‘,计算为2A/a)
镜头的选择
有了相机,没有镜头是不行的。
镜头的选择过程如下:
放大率F = 像元尺寸/精度 (相机选择了之后,像元尺寸也就确定了)
焦距=工作距离*放大率/(放大率+1),计算出结果后,就选择比这个数值小,而且最接近的标准焦距;
靶面直径=相机像元尺寸x相机的水平或者垂直的像素数,(所以镜头的尺寸必须大于这个数值,要不然在传感器上成的像就不全)
这几个参数确定后就可以选择镜头型号了。
这里要注意,选择镜头的时候,还要注意视场角,(假设市场大小为2Ax2B)
水平视场角=2*arctg(A/C)
垂直视场角=2*arctg(B/C)
审核编辑:黄飞
-
机器视觉的镜头选择2012-10-22 3327
-
如何选择镜头2017-01-14 3261
-
【设计技巧】机器视觉设计者如何选择合适的镜头?2019-07-19 2251
-
分享一个机器视觉相机镜头及原理方面的基础知识2019-07-25 3025
-
湖南机器视觉系统中的镜头参数如何设置?2021-05-26 1574
-
机器视觉入门课程(光源选型、镜头选型、相机选型、打光方式分析)2017-12-15 2389
-
关于机器视觉选型问题2018-12-05 4166
-
如何选择机器视觉相机的镜头2019-05-11 5508
-
机器视觉的工业镜头与工业相机CCD应该如何选择方法说明2019-12-06 5327
-
机器视觉工业镜头参数的介绍2020-11-27 4260
-
机器视觉工业镜头专业术语的详解2021-04-28 1204
-
机器视觉如何选择合适的光源2022-11-30 3604
-
如何选择相机与对应的镜头2023-01-31 5013
-
机器视觉的镜头的选择策略,优势是什么?2023-09-20 1810
-
工业相机搭配的镜头品牌2023-12-28 3629
全部0条评论

快来发表一下你的评论吧 !
