

如何利用GSG-721与ublox GNSS接收机实现RTK功能仿真?
电子说
描述
作者介绍
一、前言
实时动态载波相位差分技术(RTK)是应用测量来纠正当前卫星导航(GNSS)系统的常见误差。RTK定位是基于至少两个GNSS接收机——参考站和一个或多个流动站。参考站在可视卫星中获取测量数据,然后将这些数据和它的位置一起广播给流动站。流动站也收集卫星的测量数据,并将其与参考站传输过来的参考校正RTCM数据一起处理,实现厘米级的定位精度。
RTK技术在许多领域都有广泛的应用,特别是在地理测量、土地测绘、建筑施工和机器导航等领域。它可以提供高精度的位置信息,使得在这些领域中进行精确测量、定位和导航成为可能。
今天,德思特术工程师何佳壕为您介绍如何利用GSG-721 GNSS模拟器与RTCM功能插件实现一次RTK功能仿真!
二、了解Skydel RTCM插件
德思特GNSS模拟器可以在本地实现RTK的仿真,Skydel RTCM 插件允许模拟来⾃基站的 RTCM 3.3消息,⽽⽆需为基站接收器⽣成真实的射频信号。RTCM 消息可以通过串行端⼝连接或 NTRIP从 Skydel 应⽤程序流式传输到流动站接收器。
三、测试目的
本次测试我们将模拟GPS L1+L2,BEIDOU B1+B2信号输出一个圆形轨迹,并针对RTK开启与否对定位精度的影响做对比。
四、测试前准备
(一)测试器材检查
本次测试我们需要用到的硬件有:
● GSG-721 GNSS模拟器以及配套的显示器、鼠标、键盘
● Ublox GNSS接收器,型号:C099-F9P-0,支持RTK功能
● 安装了ublox上位机软件u-center 23.08version的PC一台
● 路由器,提供本地网络与可能用到的VPN网络
● 其他连接用配件
(二)测试连线
测试中共有三套测试连线:
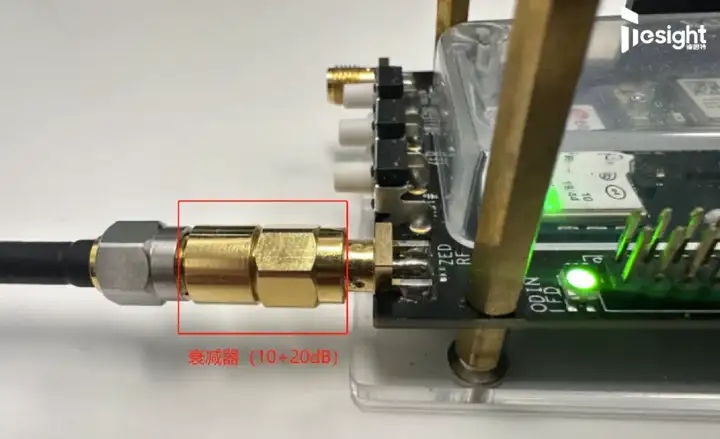
①射频组:GSG-721的前面板GNSS仿真信号端口出接出线缆,加入10dB+20dB衰减器(公进母出),接入Ublox GNSS接收器左上角ZED端口。
②网络组:外部以太网接入到路由器WAN端口,LAN1接出至GSG-721后面板以太网端口;LAN2接出至安装了ublox上位机软件的PC以太网端口。
③电源组:GSG-721后端直接接入220V交流电,Ublox电源线与数据线是分开的两条线缆,需要都接入到目标PC上。
至此,我们就完成了基本的连线。
五、测试配置——GSG-721 Skydel界面配置
(一)软件license检查
打开Skydel主界面,点击"Help"-“About GSG-7”,检查是否具有相关星座选件、MULTI选件、RTK选件。
(二)基准站(Base)配置
1.预保存
打开一个Skydel实例,开始一个新的配置,此处可以“ctrl+s”将该配置做预保存,命名为Base以方便后续区分。
2.输出信号设置
导航到Settings – Output(设置 - 输出),选择NoneRT,双击两次,分别选择:
● GPS L1CA+BEIDOU B1
● GPS L2C + BEIDOU B2

3.时间同步
在Setting设置->Vehicle车辆->Body车身中选择参考站位置。将轨迹类型设置为“Fixed固定”,并输入坐标经纬高=(-73°,45°,2)。
4.RTCM配置
将RTCM插件加载到配置中。进入Settings设置->Plug-ins插件,选择Add Plug-in添加RTCM插件。设置插件实例的名称和类型,并选择 "OK"。选择新的插件,在本案例中我们将使用Ntrip直接传输。
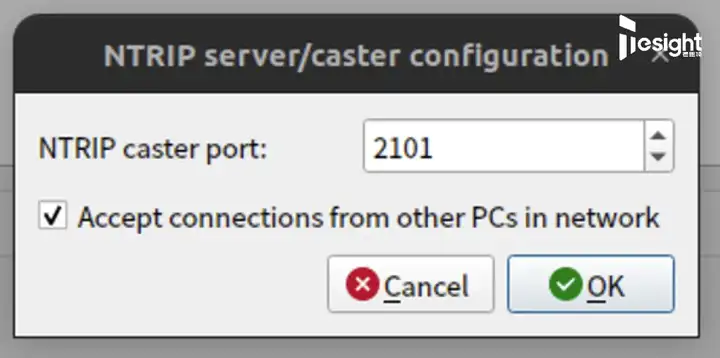
①勾选Ntrip选项,点击右侧“config”
②可设置端口号默认为2101,勾选:Accept connections from other PCs in network
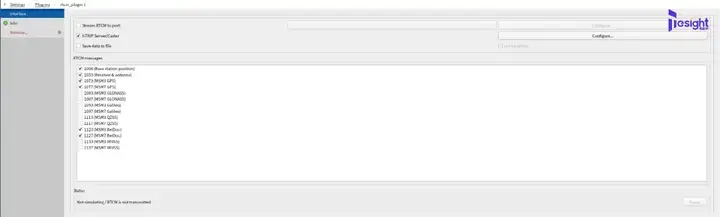
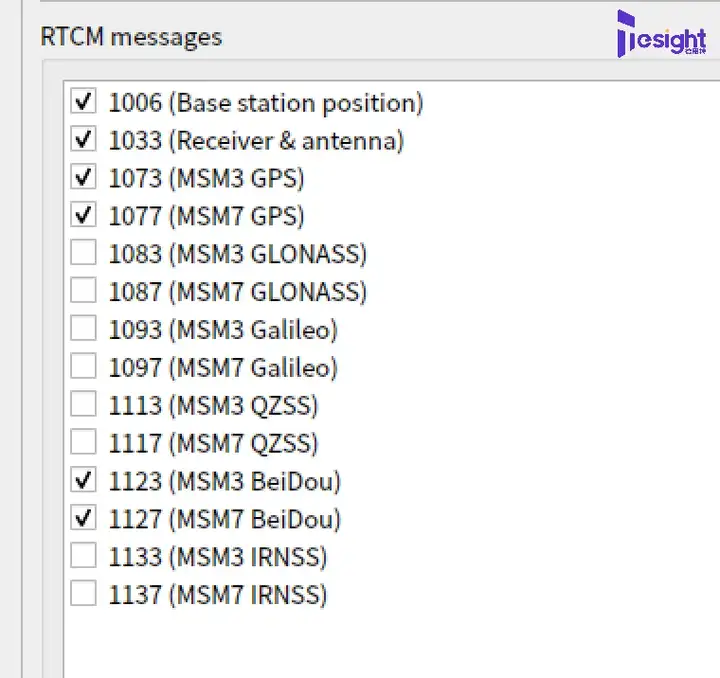
③根据GNSS星座需求,配置对应的RTCM消息类型,本例中选择:
1006,1033,1073,1077,1123,1127
④打开命令行,输入“ifconfig”,获取本机IP地址192.168.100.255:
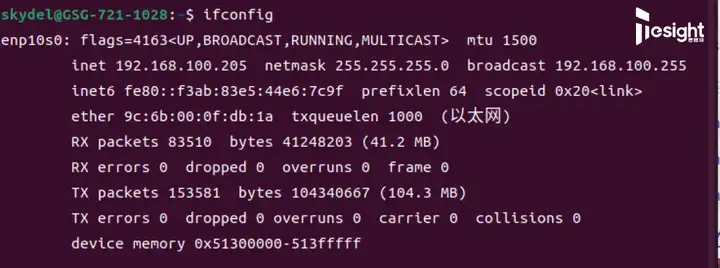
至此,我们完成了基准站配置。
(三)流动站(Rover)配置
1.预保存
新打开一个Skydel实例,开始一个新的配置,此处可以“ctrl+S”将该配置做预保存,命名为Rover以方便后续区分。
2.输出信号设置
与基准站配置一致:导航到Settings – Output(设置 - 输出),选择DTA-2116,双击两次,分别选择:
GPS L1CA+BEIDOU B1
GPS L2C + BEIDOU B2

3.时间同步
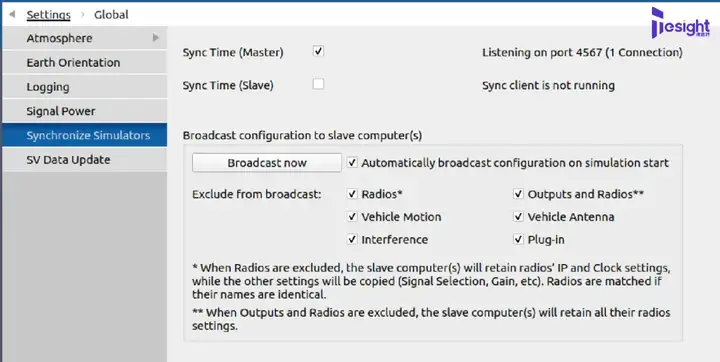
进入Settings设置->Global全局->Synchronize simulators,设置复选框Sync Time(Master),这将允许参考站模拟与流动站模拟同步开始。设置复选框"Automatically broadcast configuration on simulation start"。在Exclude一栏,勾选所有选项。
4.设置车辆轨迹
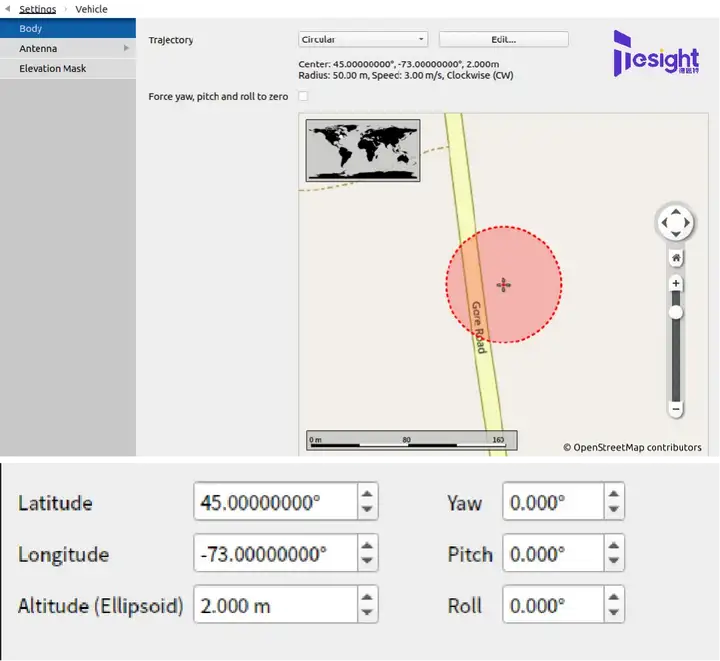
在Settings设置->Vehicle车辆->Body车身中选择参考站位置。将轨迹类型设置为"Circle(圆形)",并输入坐标经纬高=(-73°,45°,2),轨迹半径为50m,速度、方向默认。
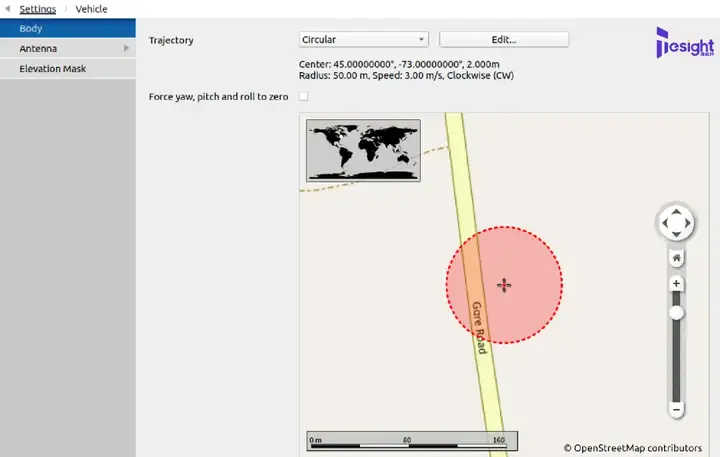
保存配置,至此我们完成了流动站配置。
(四)ublox u-center设置
1.连接
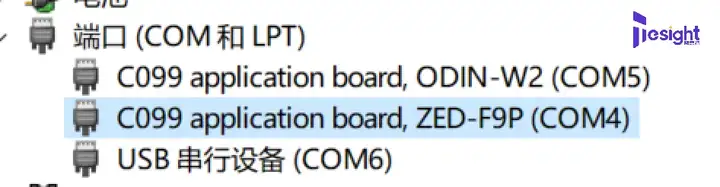
①在准备好的PC上连接ublox接收机,打开设备管理器,查看串口号,本例中串口号为COM4。
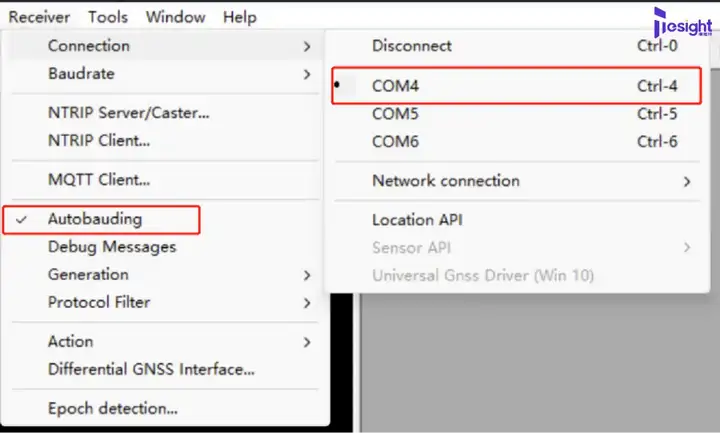
②打开u-center,在上方receiver选择对应串口COM4,设置波特率模式为:“Autobauding”,等待连接成功。
2.观测无RTK情况
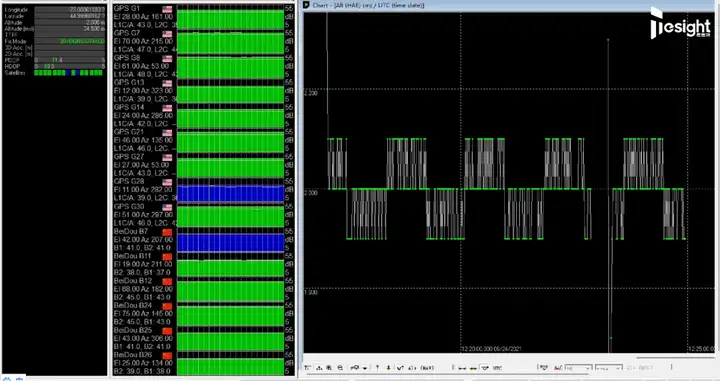
在Skydel中选择“Rover”实例,点击“Start”,Ublox中打开GNSS信号观测窗口、Chart图,点击冷启动,等待信号稳定后,观测到定位模式为3D,观测高度偏移:
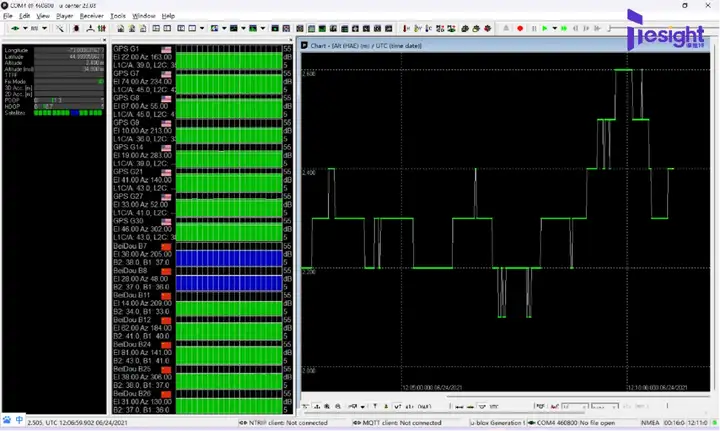
可以看到设置高度为2m,但是定位结果并没有在2m附近稳定下来,最高达到了2.6m,定位偏差基本在0.1-0.5米内。
3.观测有RTK情况
①进入U-Center,点击Receiver中的 "NTRIP Client":
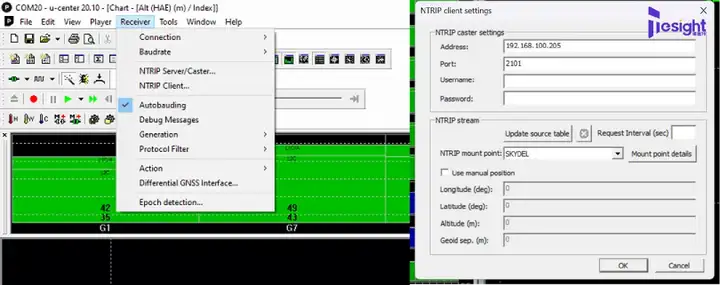
②在这个窗口中,输入之前GNSS模拟器所在的IP地址与Ntrip端口号:
● IP:192.168.100.255
● Port:2101
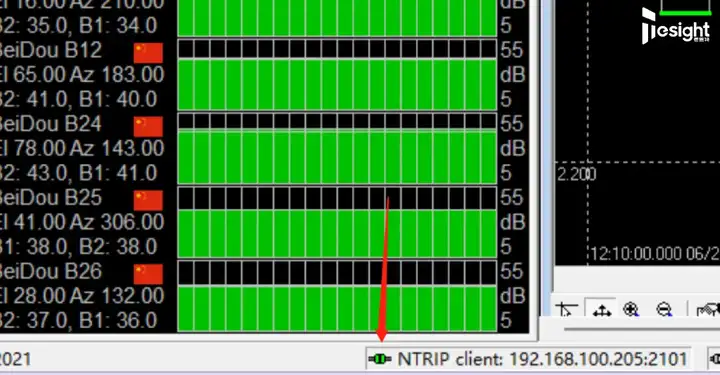
点击更新源表,出现Skydel后选择OK,此时下方Ntrip端口变绿,RTCM消息开始推送。
③冷启动设备,等待信号稳定,定位模式变为3D/DGNSS,观测高度偏移,我们注意到这次的高度是稳定的,精确定位到高度为2m,误差区间为±0.1米,即RTK功能正常发挥作用。
END
通过此次文章,您是否已经了解到如何利用GSG-721与ublox GNSS接收机实现RTK功能仿真?如果您在操作中有问题或想了解更多,欢迎联系德思特!
关于德思特
德思特是原虹科测试测量事业部孵化出来的独立公司,基于超过10年的业务沉淀,德思特公司专注提供电子测试/测量解决方案。主要业务范围涵盖:汽车电子仿真及测试、射频微波及无线通信测试、无线频谱监测与规划、无线通信(包括智能网联汽车无线通信、轨道交通、卫星通信、室内无线通信)、半导体测试、PNT解决方案、大物理和光电测试等。
核心成员具有9年以上的测试测量、无线通信及其他相关行业资历;技术团队获得世界五百强PNT解决方案合作伙伴Safran的GNSS技术及信号仿真和软件Skydel培训认证证书、航空航天测试和测量合作伙伴Marvin Test 的自动化测试软件ATEasy培训认证证书。
德思特研发部,核心成员获得国际项目管理师PMP认证资质,并具备LabVIEW、python等多种编程语言能力,优势能力集中于:HIL测试,半导体测试,EOL测试和质量检测等多种系统研发集成,拥有10多个实用新型和专利授权。
围绕汽车电子、射频微波、通信、航空航天等行业提供专业可靠的解决方案,现有客户包括华为、德赛西威、蔚来汽车、理想汽车、航天科工集团、清华大学、北京航空航天大学、中电科集团等。
此外,我们还是中国无线电协会、中国通信企业协会、雷达行业协会、RIS智能超表面技术协会等行业协会的会员。
审核编辑 黄宇
-
基于软件定义架构的GNSS模拟器——GSG-721开箱大揭秘!#GNSS模拟 #GNSS仿真 #导航 #定位虹科卫星与无线电通信 2024-03-14
-
【TL6748 DSP申请】软件GNSS接收机2015-09-09 1961
-
GSG-54 销售维修 GSG542020-08-16 1392
-
GSG-54 供应二手 信号发生器 GSG542020-12-02 521
-
基于SoC的星载微型GNSS接收机设计2016-01-04 1113
-
Ublox-MAX-M8接收机配置和协议的获取2021-12-04 1244
-
浅谈GNSS接收机维护保养及维护2023-01-13 3282
-
BT-641G RTK GNSS接收机数据手册2023-04-25 782
-
简析GNSS接收机核心技术以及特点2022-11-30 4296
-
GNSS接收机维护保养方法2022-12-15 3855
-
基于A40i平台在RTK接收机上的应用-RTK接收机解决方案-飞凌嵌入式2021-10-28 2404
-
GNSS接收机是什么?怎么分类的?2023-10-30 6789
-
大坝安全监测GNSS接收机:保障水库安全2024-04-17 1568
-
BG-620 RTK GNSS接收机手册2025-03-27 658
-
使用德思特GNSS模拟器实现RTK基站与流动站的独立模拟2025-11-30 1344
全部0条评论

快来发表一下你的评论吧 !
