

 鸿蒙南向开发实战:【智能扫地机】
鸿蒙南向开发实战:【智能扫地机】
电子说
描述
样例简介
此Demo采用润和的智能小车套件为硬件模型,通过修改代码具备了扫地机器人简易的避障功能及防跌落功能,并且能通过wifi接入数字管家应用场景。智能扫地机不仅能接收数字管家应用下发的指令启动或停止扫地机器人,而且还可以加入到数字管家的日程管理中。通过日程可以设定智能扫地机启动的时间段,使其在特定的时间段内,智能扫地机自动启动或者停止。
避障功能原理:通过超声波传感器,传回正前方障碍与智能扫地机的距离信息,配合电机控制,避开障碍物;
防跌落功能原理:如图左右各朝下安装了红外传感器,通过红外对管(发射管和接收管)收发特性:1 在地面上时发射管发出的红外信号充分经地面反射回接收管,即接收管能接收到足够强的红外光,代码判断为在地面;2 小车悬空时,发射管发出的红外信号不能被接收管接收,代码判断为在悬空状况;3 再配合两轮运动控制,避免小车跌落。
运行效果
当设备应用启动之后,操作效果如下:
样例原理

如上图所示,智能扫地机整体方案原理图可以大致分成:智能扫地机、数字管家应用、云平台三部分。智能扫地机通过MQTT协议连接华为IoT物联网平台,从而实现命令的接收和属性上报。
工程版本
- 系统版本/API版本:OpenHarmony 1.0.1 release
- IDE版本:DevEco Device Tool Release 3.0.0.401
快速上手
准备硬件环境
- BearPi-HM Nano套件一套
- 预装HarmonyOS手机一台
注:HarmonyOS是华为基于开源项目OpenHarmony开发的面向多种全场景智能设备的商用版本
准备开发环境
|

准备工程
鸿蒙开发文档参考+mau123789是v直接领
本用例采DevEco Device Tool工具进行开发,当配置完开发环境后,我们可以在IDE上进行工程的配置下载。
- 打开DevEco Device Tool,连接远程linux服务器:[DevEco Device Tool 环境搭建]
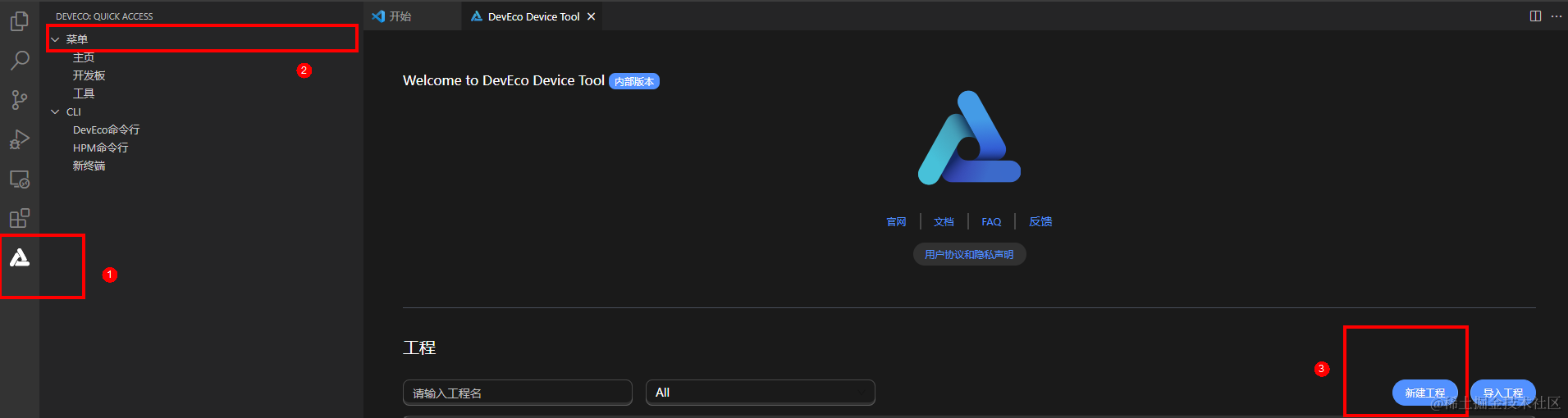
- 点击左下角DevEco插件图标,然后点击左边框出现的主页,弹出主页界面,主页中选择新建项目,如下图:
- 配置下载工程
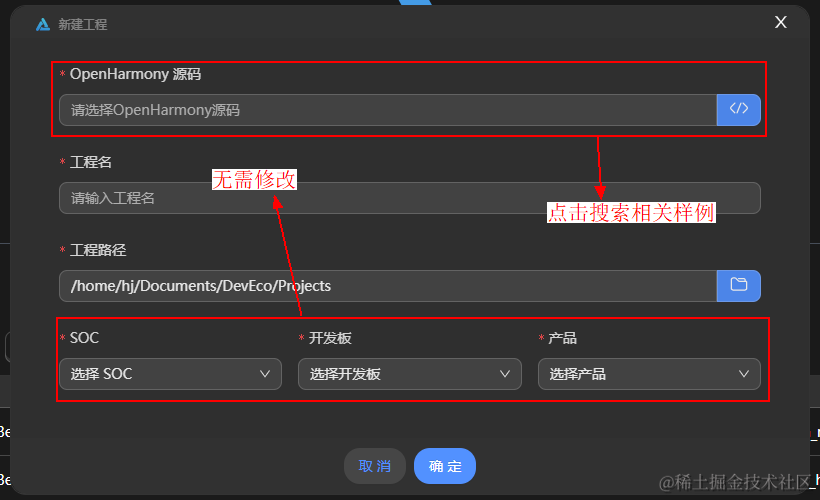
如上图所示,填写对应样例工程的名称,选择对应的样例组件和样例工程存放路径后,点击创建即可进行样例工程的下载。下载界面如下:

当右下角显示正在下载OpenHarmony镜像时,耐心等待下载完成即可。

准备工具链
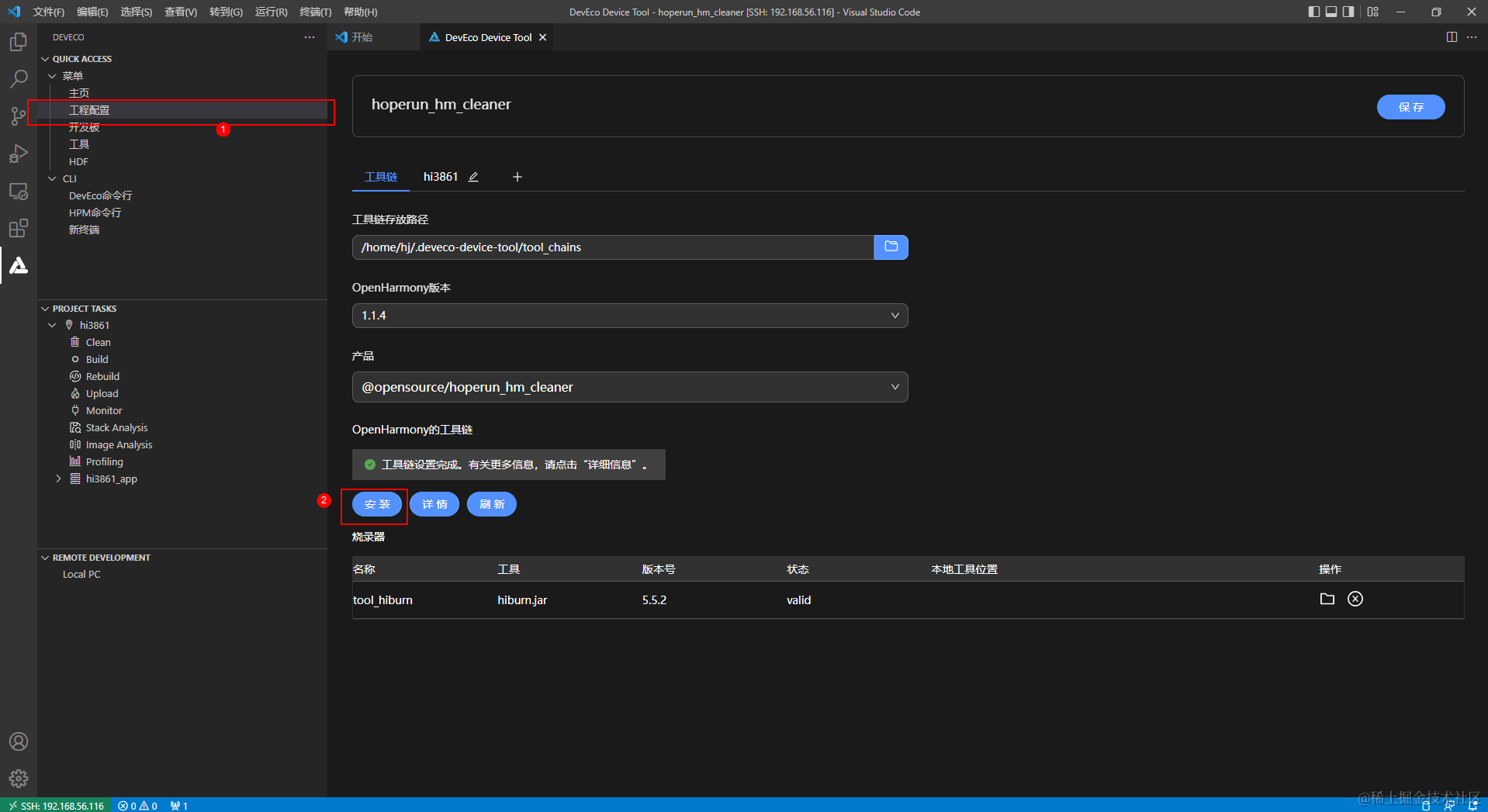
- 在Projects中,点击Settings按钮,进入cleaner配置界面。
- 在toolchain页签中,DevEco Device Tool会自动检测依赖的编译工具链是否完备,如果提示部分工具缺失,可点击SetUp按钮,自动安装所需工具链。
- 工具链自动安装完成后如下图所示。
st

编译
样例代码下载完成后,DevEco Device Tool会重新要求连接远程服务器,输入密码连接后会进入对应的代码编辑界面,此时点击左下角DevEco插件图标,选择PROJECT TASKS可以查看到对应的样例工程,点击build选项进行编译,并可在终端查看对应的编译结果。

固件生成在对应工程目录的out/hispark_pegasus/smart_cleaner/目录下。

烧录/安装
编译完成后可以通过DevEco Device Tool进行烧录,在烧录前需要做一些烧录的配置:
配置准备
在配置烧录前需要先查看DevEco Device Tool是否可以正常识别串口。
- 点击左边栏"REMOTE DEVELOPMENT",找到 并点击” Local PC “ 选项。
- 查看 Local PC右边图标
如若图标为 ,则代表DevEco Device Tool已连接本地,可以正常识别串口。
,则代表DevEco Device Tool已连接本地,可以正常识别串口。
如若图标为 ,则代表DevEco Device Tool未连接本地,不能识别串口,此时需要点击该绿色图标进行连接,连接成功后图标会变为
,则代表DevEco Device Tool未连接本地,不能识别串口,此时需要点击该绿色图标进行连接,连接成功后图标会变为 。
。
 ,则代表DevEco Device Tool已连接本地,可以正常识别串口。
,则代表DevEco Device Tool已连接本地,可以正常识别串口。 ,则代表DevEco Device Tool未连接本地,不能识别串口,此时需要点击该绿色图标进行连接,连接成功后图标会变为
,则代表DevEco Device Tool未连接本地,不能识别串口,此时需要点击该绿色图标进行连接,连接成功后图标会变为 。
。
- 点击主页,在主页选择对应工程,点击配置工程进入到配置页面

配置串口
配置页面选择的板级配置页面,在该页面查找到烧录选项,配置烧录选项中的upload_port和upload_protocol,upload_port选择开发板对应的串口号,upload_protocol默认选择hiburn-serial,最后点击右上角的保存按钮进行保存。

烧录
当配置完串口以及固件后,直接点击左边栏工程管理中的upload即可,此时下方终端会出现对应烧录的信息,当终端出现BootromDownloadBoot字样,按下开发板的 “RESET” 键复位开发板即可。

操作体验
设备配网
- 在设备上电前需准备好安装了数字管家应用的HarmonyOS手机
- 写设备NFC标签;
- 烧录完成后,上电。刚烧录完后设备处在配网模式下,OLED显示WIFI_CONNECT_ING,将手机上半部靠近开发板NFC标签处,wifi连接成功后会显示WIFI_CONNECT_OK,成功连入华为云端会显示IOT_CONNECT_OK;
- 无需任何操作手机将自动拉起数字管家应用并进入配网状态,配网过程中无需输入热点账号密码。
无感配网操作如下图所示:

设备控制
配网完成后,数字管家应用会自动进入智能扫地机的控制页面,通过控制页面可以实现对智能扫地机启动、停止操作。

添加日程
使用者可以进入数字管家的日程管理页面中添加智能扫地机的相关日程,具体步骤如下:
- 在输入日程名称后,选择相关通知成员和扫地机设备;
- 选择期待执行的扫地机操作,例如:设置智能扫地机在特定时间段内启动或停止;
- 设置日程的重复日期,例如:可以设置单次日程(仅在当天执行),或者重复日程(设置日程在设定的 星期几重复执行)

审核编辑 黄宇
- 相关推荐
- 热点推荐
- 机器人
- 鸿蒙
- HarmonyOS
- OpenHarmony
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 10629
-
扫地机器人如何选购?2015-01-21 7854
-
扫地机器人方案2015-05-18 10619
-
【NanoPi2申请】扫地机器人2015-12-02 3601
-
原来扫地机器人是这样工作的!2015-12-24 31563
-
联鸿物联智能扫地机方案设计说明2016-09-29 6801
-
智能扫地机器人解决方案2017-05-27 8809
-
扫地机是否需要安装摄像机2017-11-25 3958
-
你对扫地机了解多少?2017-11-30 2734
-
如何选择好的扫地机器人2018-08-20 4602
-
智能扫地机器人用什么马达2018-10-12 7080
-
DONI家用智能扫地机优势介绍2018-12-07 6296
-
扫地机的自动回充方式2021-09-14 2205
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 2843
-
【OpenHarmony开发样例】基于润和Wi-Fi IoT智能小车套件开发的智能扫地机2022-03-07 12042
全部0条评论

快来发表一下你的评论吧 !
