

基于TMS320F2812的高频链逆变器控制系统
电源设计应用
描述
本文以TMS320F2812高性能DSP控制器为核心,设计了高频链逆变器的控制系统及部分硬件电路,该逆变电源的主电路采用全桥双向电流源高频链逆变器的拓扑结构,选择电压瞬时值反馈的单闭环控制方案,可实现能量的双向流通。实验结果表明了该控制策略的可行性及有效性。
1 高频链逆变电源的拓扑和原理
全桥双向电流源高频链逆变器的主电路拓扑结构如图1所示,它由高频逆变器、高频变压器和周波变换器3部分组成。工作时,按能量传递方向来看,该逆变器工作在两个不同状态。当输入电源向负载传递功率时,高频链逆变器将直流电压能源变换为脉动的电流能量存储在储能式高频变压器中,周波变换器将该高频脉动电流低频解调,经滤波后得到低频交流电,供电给负载。负载向输入电源回馈能量时,高频逆变器工作在整流状态,周波变换器工作在调制状态。
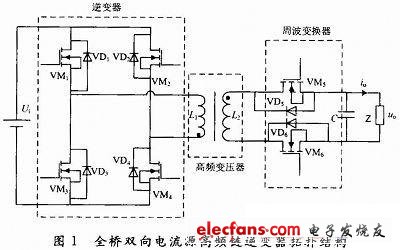
全桥双向电流源高频链逆变器是以反激式(Flyback)功率变换器的拓扑结构为基础的。按照输出电压uo和输出电流io的极性划分,该逆变器具有4种工作模式A,B,C,D,每一种工作模式的结构拓扑都相当于一个Flyback功率变换器,而且对于不同的负载,逆变器的工作模式顺序不同。
当uo>0,io>0时,逆变器工作在模式A,VM1和VM4高频斩波,VM5常通。Ui,L1,L2,VM1,VM4,VM5,VD6,C,Z构成一个Flyback变换器,电源Ui向负载Z传输能量。
当uo<0,io>0时,逆变器工作在模式B,VM5高频斩波,VM6常通。Li,L1,L2,VM5,VM6,VD1,VD2,VD3,VD4,C,Z构成一个Flyback变换器,负载Z向电源Ui回馈能量。
当uo<0,io<0时,逆变器工作在模式C,VM2和VM3高频斩波,VM6常通。Ui,L1,L2,VM2,VM3,VM6,VD5,C,Z构成一个Flyback变换器,电源Ui向负载Z传输能量。
当uo>0,io<0时,逆变器工作在模式D,VM6高频斩波,VM5常通。Ui,L1,L2,VM5,VM6,VD1,VD2,VD3,VD4,C,Z构成一个Flyback变换器,负载Z向电源Ui回馈能量。
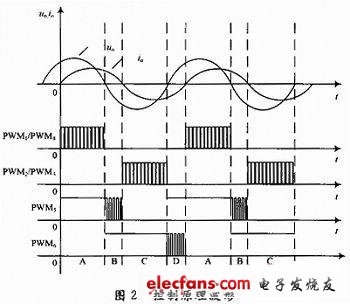
当逆变器带感性负载时,输出电流的基波分量io落后于输出电压uo,其控制原理波形如图2所示。从图中可以清晰地看到,控制原理波形与上述4种工作模式是一一对应的。逆变器工作顺序为A→B→C→D。
2 高频链逆变电源控制系统
2.1 控制系统的总体结构
控制系统以TMS320F2812为核心,主要包括电压模拟量采样电路、电压电流过零信号检测电路和MOSFET驱动电路等。现场采集到的电压模拟量经过模拟信号调理电路送入DSP的ADC单元,由DSP定时采样并完成A/D转换,DSP将A/D转换后的数据与参考正弦电压信号做比较得到误差信号,再根据DSP捕获单元捕获到的系统输出电压电流过零信号情况,输出脉冲信号至驱动电路,完成对主电路的控制。
2.2 控制系统的硬件电路
2.2.1 电压、电流检测及调理电路
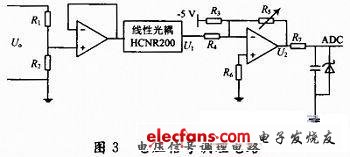
系统需要检测输出电压的瞬时值及输出电压过零信号和输出电流过零信号,作为反馈变量至DSP。系统输出电压采集电路使用线性光耦HCNR200实现隔离采样。HCNR200具有高线性度、低成本、高稳定度及可灵活设计等优点,适合采样电路的工作要求。该电压采集系统中,先将输出电压分压,然后经过线性光耦HCNR200实现反相采集信号,幅值为1;再经过反相比例加法器使得采集到的交流电压信号大小在0~2.5 V之间,中心值为1.25 V;再经过限幅保护送至DSP的A/D端。电压检测电路图如图3所示。
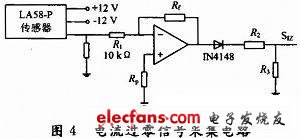
输出电流过零信号采集电路的主要原理是利用运算放大器的饱和截止特性,将电流霍尔传感器LA58-P采集到的电流信号反相比例放大,通过选择较大的放大倍数,使运算放大器工作在饱和状态,这时输出波形近似双极性方波,再经过IN4148二极管整形及分压后得到幅值为3.3 V单极性方波,送至DSP的I/O接口,电路如图4所示。输出电压过零信号采集电路与之相似,只是换用线性光耦HCNR200采集电压信号而已。
2.2.2 马区动电路
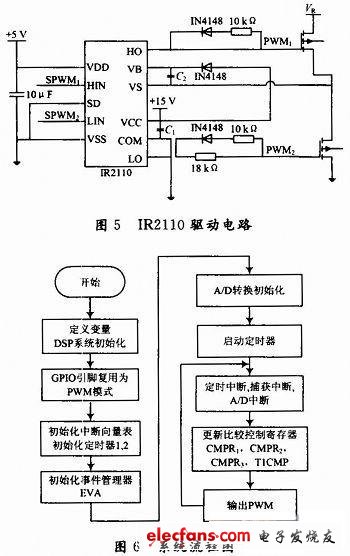
DSP控制单元输出的SPWM信号需经过隔离驱动模块再送至MOSFET的栅极,实现对MOSFET开断的控制。驱动电路有很多种,该系统中的驱动电路采用集成芯片IR2110完成。IR2110内部应用自举技术实现同一集成电路可同时输出2个驱动逆变桥中高压侧与低压侧的通道信号,工作电压可达500 V,特别适合桥式电路的驱动。IR2110设计和使用都非常方便,其电路接线图如图5所示。其中,引脚HIN及引脚LIN分别为驱动逆变桥中同支路上下两个MOSFET功率管驱动脉冲信号的输入端,接DSP控制器发出的2路驱动脉冲信号。低压侧通道门极驱动输出VCC提供电源,高压侧通道门极驱动输出由VB供电。15 V电源接至引脚VCC,自举电容C2负极接至VS(高压侧浮动地)一脚,正极接至浮动电源VB上,+15 V电源通过快恢复二极管对自举电容充电,为高压侧通道HO供电,自举电容C2使高压侧电源获得一个高于VR的电压。自举电容C2的取值取决于开关频率、占空比和功率等,对于5 kHz以上的开关应用,通常采用0.1μF的电容。
2.3 控制系统的软件设计
在设计软件框架时,本着模块化、子程序化的设计思想,根据程序所实现功能的不同,将其分为4个模块:主程序模块、周期中断模块、ADC中断模块和CAP中断模块。图6为控制系统的主流程图。
在主程序模块中,对各个模块进行初始化,调节计算程序和其他程序。初始化程序中先将6个复用的I/O引脚设置为PWM波输出引脚,再对其他寄存器进行初始化。在完成所有的初始化工作后,使能以下所需中断。CAP中断对输出电流电压的极性进行判断,用变量Flag_I和Flag_U作为标志,以判断逆变器的工作模式;A/D中断中将采样值转换成算法运算所需的实际值,与参考信号做比较,得到误差信号;T2周期中断实时根据所更新的误差信号对脉冲宽度进行调整,更新比较寄存器中的数值。主要寄存器的设置如下:
PWM信号的产生用到了EVA的两个通用计时器和全比较单元。其中,通用定时器GP1用于产生对称三角载波;GP2用于触发定时器中断程序,以调整占空比。PWM波形的产生所需要的对事件管理器用寄存器主要有以下几个:
(1)设置周期寄存器T1PR和T2PR
设定功率管的开关频率为20 kHz,则三角波载波频率为20 kHz,系统时钟频率为150 MHz。T1定时器的计数方式采用连续增减模式,则T1PR的值可由以下式子计算得到。

解得T1PR=3 750。
GP2触发定时器的中断频率为20 kHz,系统时钟频率为150 MHz,T2定时器的计数方式采用连续增模式,则T2PR=7 500。
(2)设置当前全比较寄存器CMPRx的值(采用对称规则采样法)
设三角载波的幅值为1,周期为Tc。正弦信号为ur=sinωrt,若采用对称规则采样法,则得到的正弦脉冲宽度为δ=Tcsinωrti。其中,ti为三角载波过零点。为了减小CPU的负担及满足实时性的需求,SPWM逻辑驱动信号采用查表法产生。将控制系统中所需的正弦基准信号制作成一个正弦数据表供查用,根据以上设计参数,一个周期内需要400点,故占空比的宽度值Duty为:
Duty=T1PR×2sin[n]
若比较方式控制寄存器ACTRA配置PWM1~PWM6均为高有效时,根据全桥双向电流源高频链逆变器的控制方式,VM1和VM4的控制脉冲由CMPR1控制,设变量

3 实验结果分析
对系统进行实验分析,实验样机参数为:输入直流电压为24 V,输出电压为220 V正弦交流电,输出额定容量为250 VA。VM1~VM4采用MOSFET,型号为IRF2807;VM5,VM6采用MOSFET,型号为IRFPF50。高频变压器的磁芯为PC40 EE42/21/20,初级绕组为8匝,采用AWG#18导线5根并绕;次级绕组为127匝,采用AWG#20导线。如图7所示。

可以看出,在纯阻性负载的情况下,uo,io的极性相同,VM5和VM6处于工频开关状态,两个开关管一直处于互补工作状态,能量仅从输入电源流向负载。在阻感性负载时,io落后于uo,功率管VM5处于高频开关状态,实现了能量的双向流通。当逆变器带纯阻负载时,测得的逆变器的效率为83.4%。从实验结果验证了该控制策略的可行性和有效性及高效率性。
4 结语
本文基于TMS320F2812设计了全数字化控制的高频链逆变电源系统,主电路采用全桥双向电流源高频链逆变器拓扑结构,控制方案采取电压瞬时值反馈,控制方案简单。实验结果验证了全桥双向电流源高频链逆变电路在阻性负载和感性负载下的可行性。该逆变器能实现能量的双向流动,具有变换效率高,体积小,重量轻等优点,具有良好的应用前景。
- 相关推荐
- 热点推荐
- 高频链
- 逆变器
- TMS320F2812
-
基于TMS320F2812的三相异步电机驱动控制系统2012-08-18 10080
-
TMS320F2812在电机控制系统的设计及应用2015-11-06 10462
-
基于TMS320F2812的光电色选系统介绍2019-07-16 2339
-
TMS320F2812原理与开发2009-01-06 1469
-
基于TMS320F2812的交流永磁同步电机数字控制系统2009-05-09 929
-
基于TMS320F2812的控制系统设计2010-07-20 684
-
基于TMS320F2812的SPI接口设计方案2010-04-23 2862
-
基于TMS320F2812的汽车动力控制系统2011-07-07 1069
-
TMS320F2812原理图2012-02-17 4727
-
基于TMS320F2812逆变控制系统2016-01-14 729
-
基于TMS320F2812的SVPWM变频调速系统2016-04-13 838
-
基于TMS320F2812的SVPWM控制2016-04-18 849
-
TMS320F2812简介2016-05-06 1061
-
TMS320F28122017-03-04 1232
-
基于TMS320F2812的直流无刷电机的开环控制系统2023-03-10 660
全部0条评论

快来发表一下你的评论吧 !
