

如何准确把握无人机中的PID控制逻辑?
军用/航空电子
描述
作者:逆风而行
一、背景
对于PID的初学者,经常会有疑惑,为什么位置的误差通过PID就变成了期望速度?他们之间有什么物理关系吗?还有对于无人机,为什么期望升力,又是期望加速度,又是期望油门,这个输出的量纲到底是什么?
其实,产生这个疑问的根本原因是没有区分开环控制和闭环控制。在实际控制系统中,我们经常用到开环控制和闭环控制的组合。开环控制其实就是前馈,闭环控制是反馈。接下来将以一个简单例子,说明这种这两种控制的关系。
二、关于开环与闭环控制
对于平面上一个木块,质量为,木块的加速度能够瞬间达到设置的值,现在希望木块达到速度,请问需要设置怎样的加速度。
2.1 开环控制
使用高中物理知识,容易想象,施加如下加速度
可以使得木块在时达到期望的速度。其实,这就是一个开环控制,在理想环境中可以成立,但是在实际环境中并不可行。实际的问题有:施加的加速度有点噪声,或者不能精确地达到,或者小物块的受到微小的空气阻力,这些都将会导致,积分后速度无法刚好达到。再考虑几分钟,几小时甚至几天之后,让这的速度维持下去几乎是不可能的事情。
2.2 闭环控制
为了解决这个问题,一个直观的思路就是来一个实时的控制,如果偏移了,就施加个反方向的加速度,也就是
其中,为一个正的常数。如果 ,那么 ,让木块加速度;如果 ,那么 ,让木块减速。这样,一个比例控制就横空出世了。通过这样一个实时的反馈,我们有信心让这个木块几天后还保持着的速度。控制器Simulink仿真如图1所示,效果如图2所示。
对比开环控制与闭环控制,开环控制是有明确的物理关系的,这个加速度大小与施加的时间符合运动学规律。但是闭环控制并没有这样的物理等式(但是具备物理关系),速度的误差乘以一个系数显然不等于加速度,况且这个系数还可以随意调节。
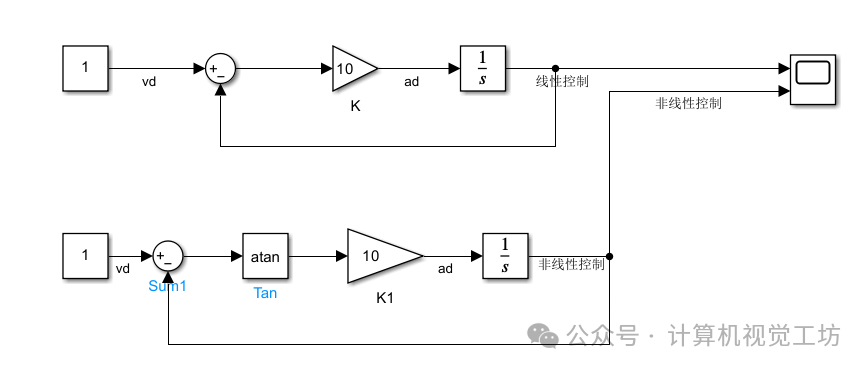
图1 控制器框图
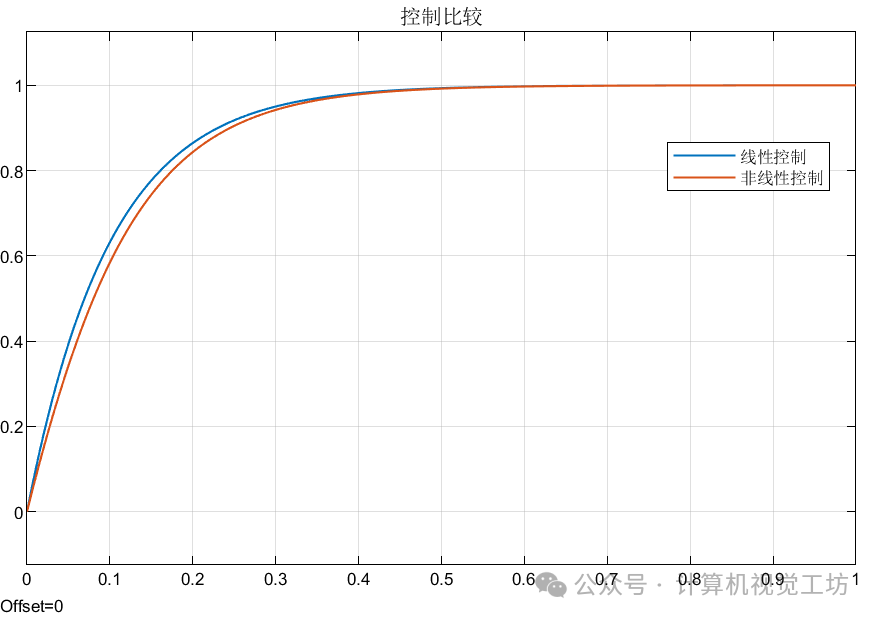
图2 线性与非线性控制
再如,控制率完全可以改为
一个非线性控制就诞生了,一样能让速度达到期望值,这更显然没有确定的物理等式。控制器Simulink仿真如图1所示,效果如图2所示。
注意区分控制器与被控对象。前面说反馈控制没有明确的物理等式,但是被控对象还是有明确的等式关系的,加速度积分是速度。如果被控对象不具备明确的物理等式,例如 轴的加速度与 轴的速度,那么这个系统不可控,不可控的系统也就没有设计控制器一说了。
三、关于量纲
现在假设不能直接控制木块的加速度,而是能够直接控制施加的外力。显然
如果使用开环控制,那么
如果使用闭环控制
此时,理论上 。
在实际工程中,我们把PID参数随意调大调小,输出是加速度还是力并不重要,这个量纲的转化已经包含在参数中了。
这就解释了为什么无人机中期望的升力为什么又变成期望油门。其实不用在意这个量纲,只要是升力和油门是一个正比例关系,把PID对应调大调小就完成了量纲变化。而名称根据业内习惯称呼即可。
上面说的量纲变化只针对线性关系(准确说只针对正比例关系)。如果两者有非线性关系,就不是直接调节PID大小这么简单了,可能需要设计对应的非线性控制率。如果有微积分关系,控制器结构都需要做出对应的调整。
审核编辑:黄飞
-
无人机培训2017-02-13 4265
-
无人机遥控方向控制问题2018-05-10 7078
-
无人机中的MCU是如何工作的?2018-10-09 2734
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3838
-
无人机飞行控制器电路该怎么设计?2019-10-22 5078
-
无人机飞控系统2021-07-21 2824
-
无人机云台是什么2021-09-01 10608
-
如何设计出一个利用PPM控制无人机动作的四轴无人机?2021-09-23 3796
-
请问一下无人机飞行控制逻辑以及不稳定原因是什么?2021-11-01 3183
-
利用WIFI控制无人机的教程2022-07-28 4046
-
制作无人机的小型PCB2022-08-01 2124
-
无人机反制市场分析2022-08-23 6954
-
改进PID的无人机飞行姿态角控制消颤算法_陆兴华2017-03-19 1078
-
无人机PID控制律设计方案pdf下载2018-03-16 1546
-
无人机的陀螺仪是什么作用 无人机控制系统原理2023-07-21 9589
全部0条评论

快来发表一下你的评论吧 !
