

基于液压控制的密炼机料斗翻转特性影响因素研究
描述
引言
传统密炼机料斗翻转力由蜗轮蜗杆提供,机器在密闭空间内长时间工作,极易产生粉尘污染,导致电机负载增大进而严重烧毁电机或出现限位开关失灵现象,影响橡胶熔炼安全、成本和进度。
基于此,对料斗翻转拟采用液压缸驱动代替蜗轮蜗杆传动;为提高料斗卸料率,需精确控制料斗翻转角度,故引入闭环控制技术[1]。结合相关机械翻转理论技术[2-3]和PID调节控制理论[4],本文提出了一种基于角度控制的密炼机料斗翻转闭环控制系统,基于AMESim软件搭建了密炼机料斗翻转角度PID闭环控制系统,研究了基于翻转液压缸角度的PID闭环控制特性,重点分析了基于料斗翻转角度控制特性的影响因素,仿真了料斗转动惯量、翻转阻尼及PID控制器微分系数对翻转角度波动程度的影响,对密炼机料斗翻转装置研制及系统优化设计具有指导意义。
1
基于角度控制的密炼机料斗翻转液压系统
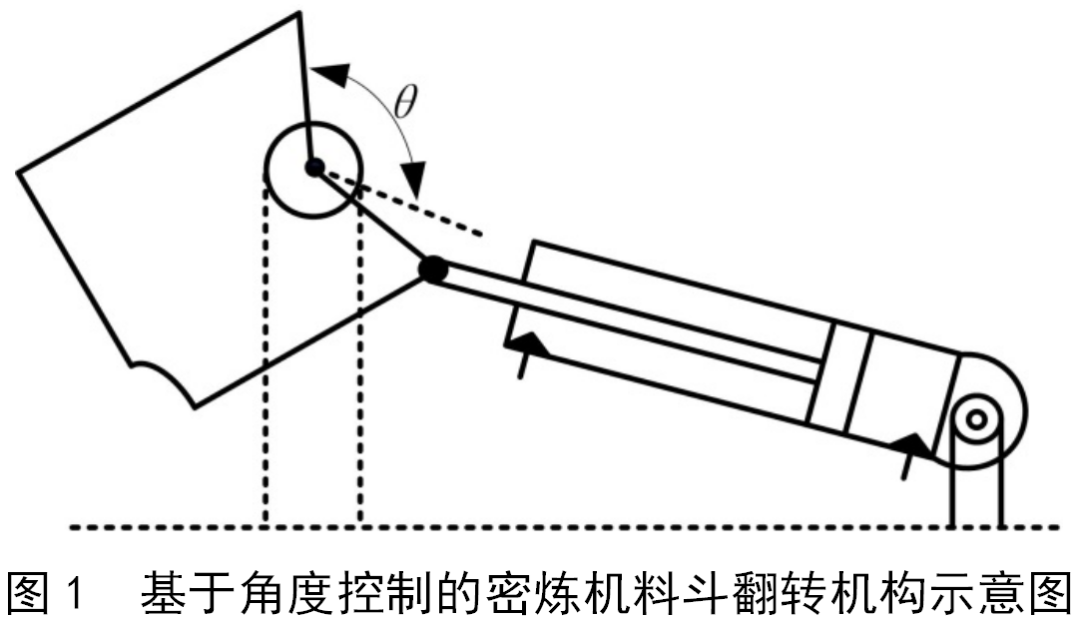
基于角度控制的密炼机料斗翻转机构示意图如图1所示,此时翻转液压缸活塞处于缩回状态,密炼机料斗已翻转卸料。设定密炼机料斗翻转角度为θ。
密炼机料斗翻转角度PID控制液压系统如图2所示[5-8],使用角度传感器及其传输通道构成翻转角度闭环控制液压系统,设定密炼机料斗翻转角度目标值为θ0。
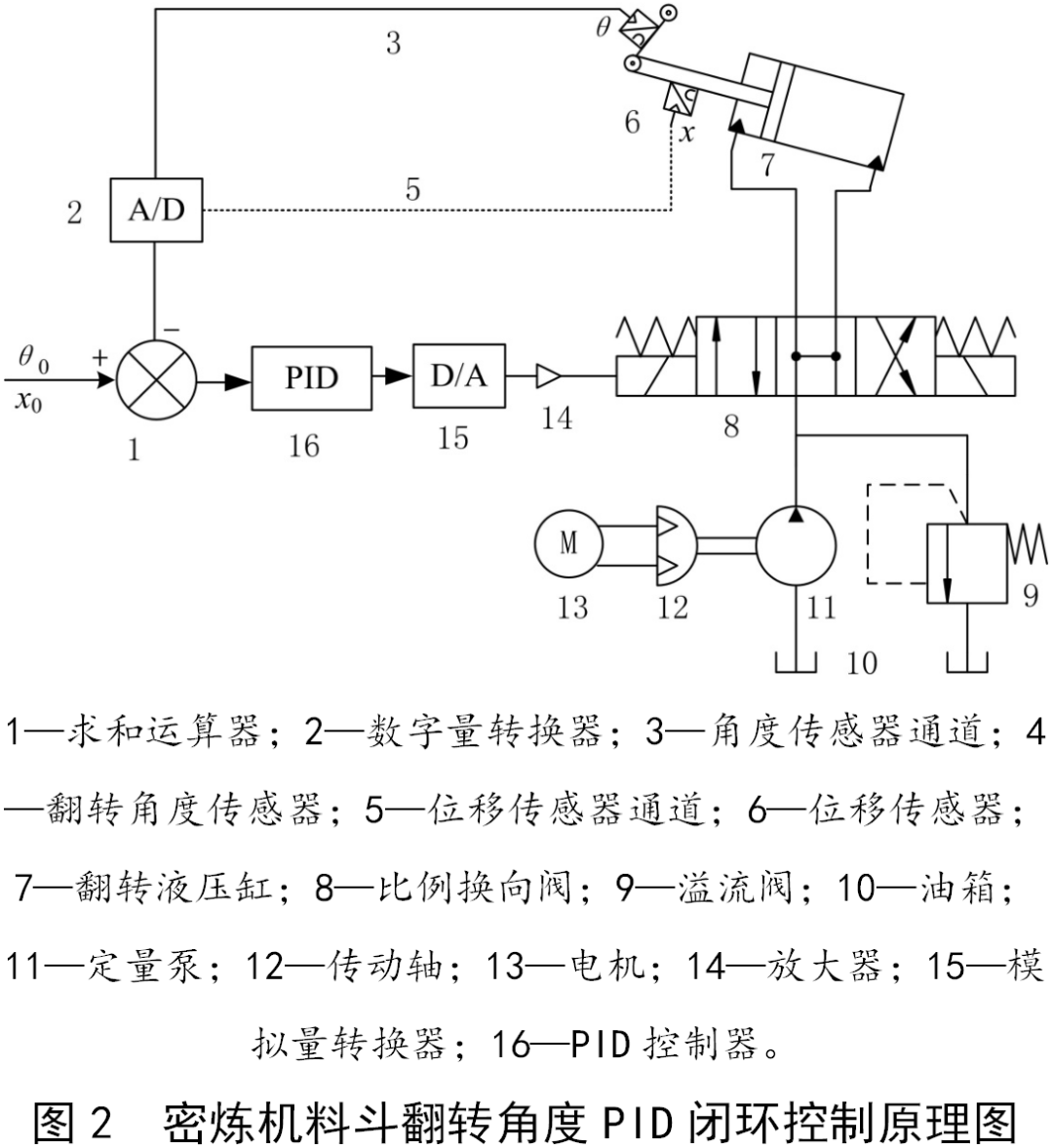
图2中电机带动定量泵工作,泵提供液压缸动作流量和压力,比例换向阀换至左位,液压缸活塞缩回,料斗逆时针旋转卸料;比例换向阀换至右位,液压缸活塞伸出,料斗顺时针旋转至待装料状态。
料斗翻转角度闭环控制逻辑图如图3所示。
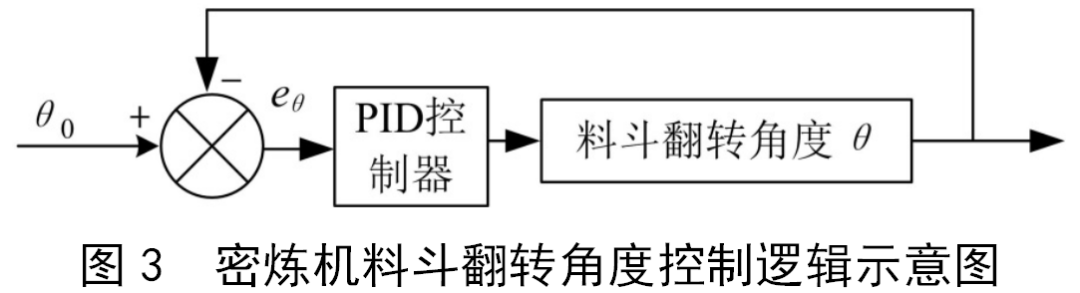
密炼机料斗翻转角度闭环控制:密炼机翻转液压系统通过角度传感器实时输出料斗翻转角度θ,通过反馈通道到达求和运算器,与其目标角度值θ0比较输出角度误差eθ,eθ传输到PID控制器控制阀芯实时动作,直至料斗翻转角度逼近目标角度值。
2
基于角度控制的料斗翻转液压系统建模
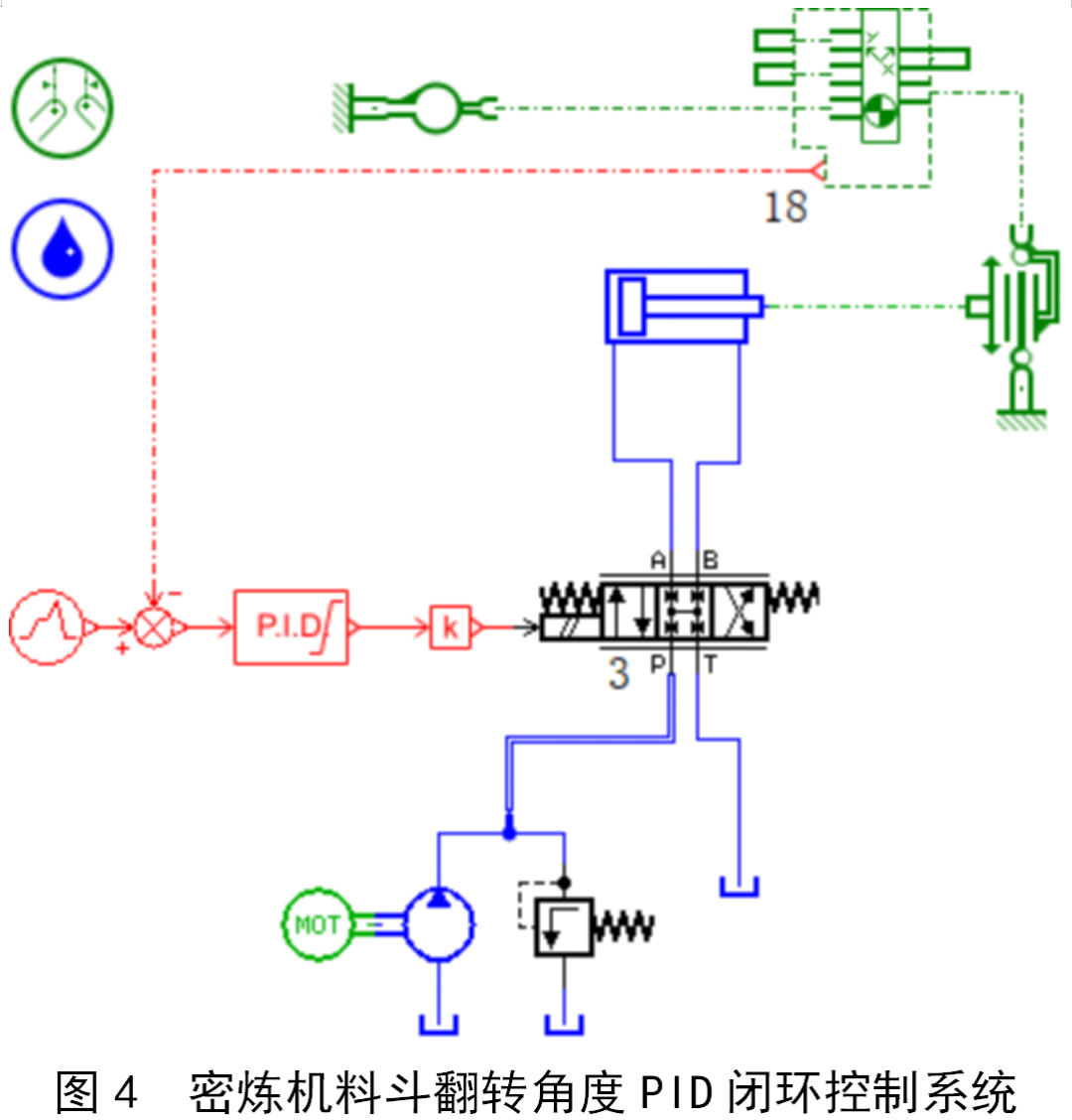
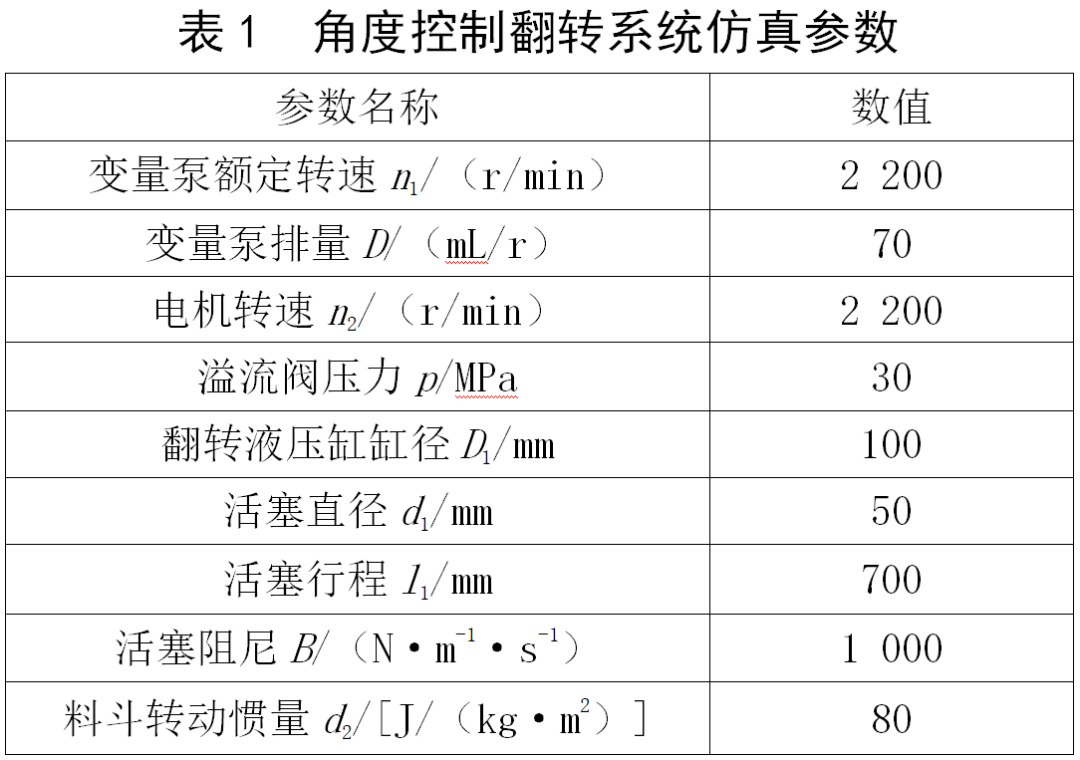
基于AMESim软件的液压库搭建如图4所示的基于角度控制的密炼机料斗翻转闭环控制系统仿真模型,系统仿真参数如表1所示。
3
基于角度控制的翻转控制特性仿真分析
在基于角度控制的密炼机料斗翻转PID闭环控制系统仿真模型中,设置料斗理想目标角度值为132°,输入PID参数值:kp=10、ki=0.05、kd=0.01,时间间隔0.01 s,仿真3 s得到如图5所示的基于角度闭环控制的料斗翻转控制特性曲线,其中图5(a)为基于角度闭环控制的料斗翻转角度及液压缸位移变化曲线,图5(b)为基于角度闭环控制的料斗翻转角速度及液压缸速度变化曲线。
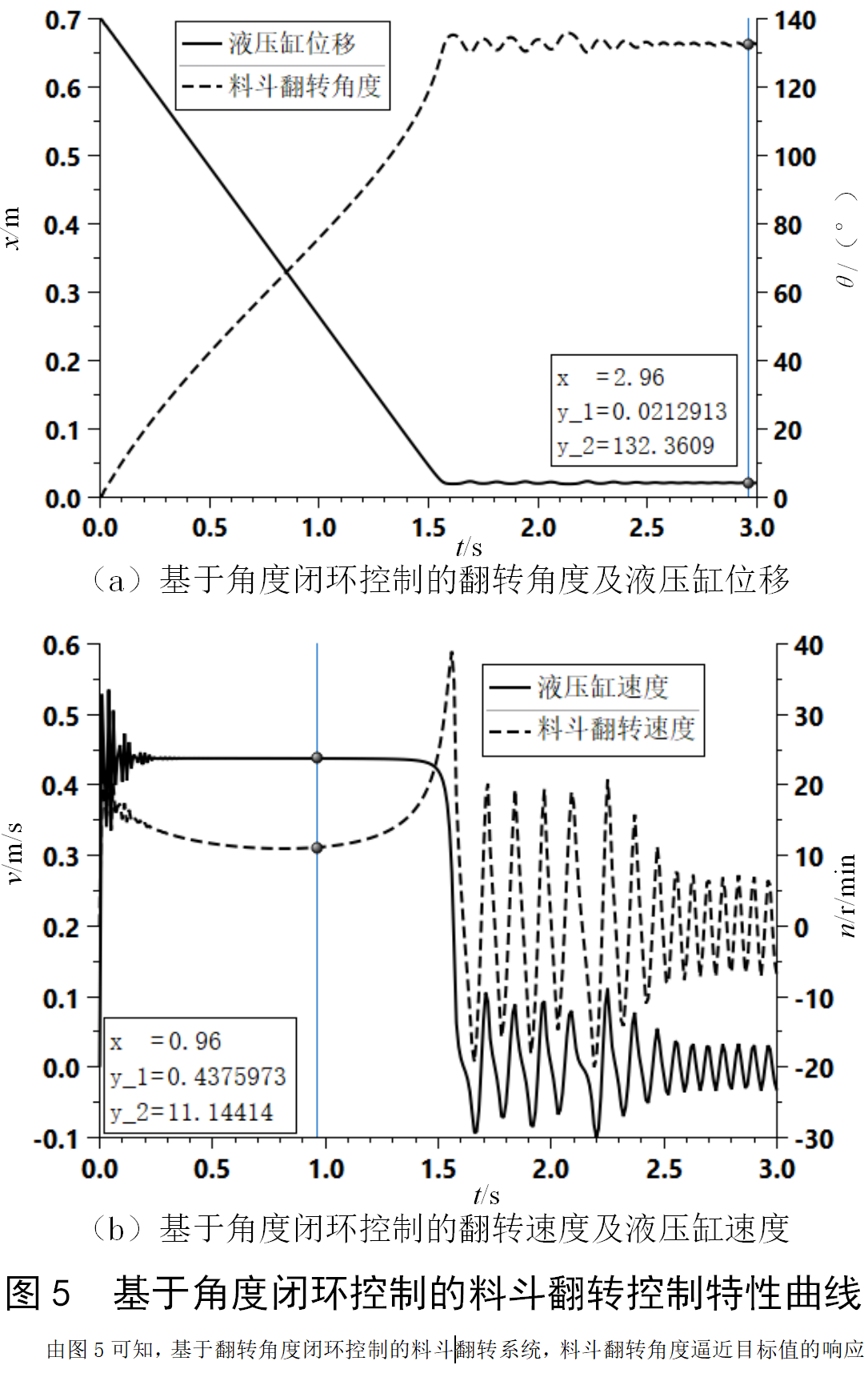
由图5可知,基于翻转角度闭环控制的料斗翻转系统,料斗翻转角度逼近目标值的响应时间约1.6 s,滞后0.2 s,实际料斗翻转角度为132.4°,料斗翻转过程中液压缸活塞缩回速度可达0.44 m/s,滞后位置控制系统0.04 m/s,料斗翻转速度约为11.14 r/min,滞后位置控制系统0.9 r/min,料斗翻转启动和结束时冲击振动严重。
4
翻转特性影响因素研究
通过减小料斗转动惯量消除翻转启停冲击,设置料斗转动惯量分别为20、40、60、80 kg·m2进行基于角度控制的料斗翻转仿真,得到如图6所示的料斗转动惯量对料斗翻转角度的影响。
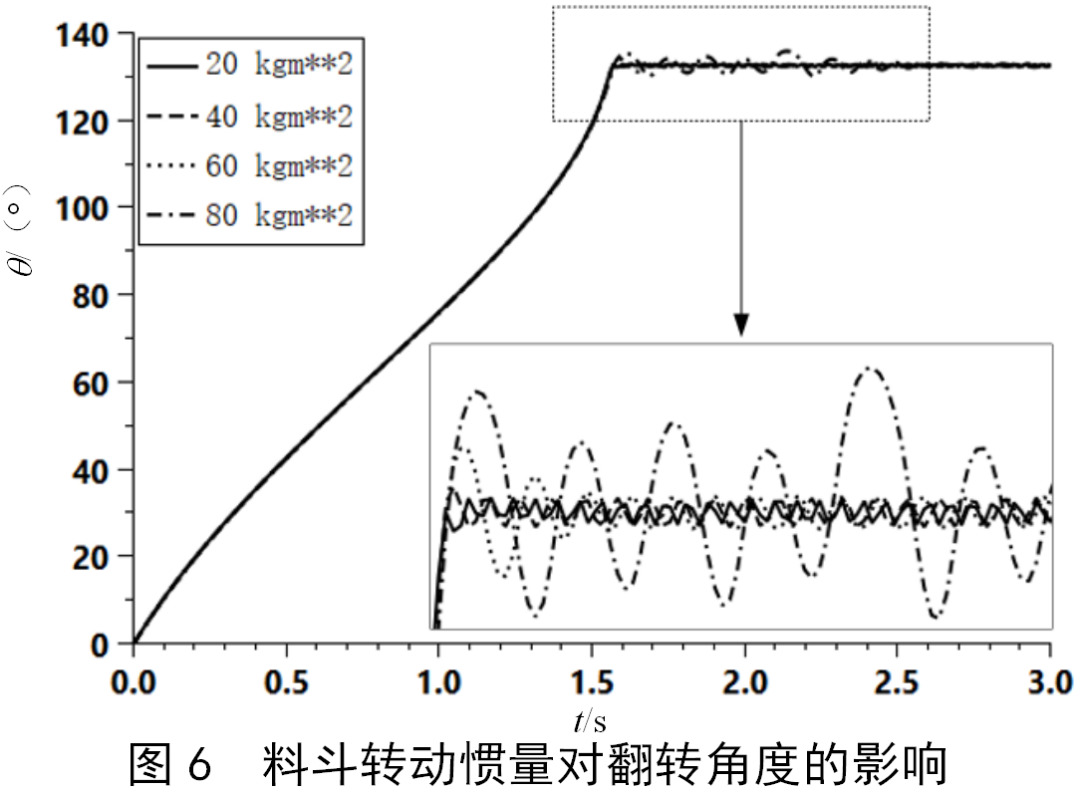
由图6可知,减小料斗转动惯量对减小料斗翻转角度具有明显的效果。
在实际中可设计料斗形状使其装料重心与旋转铰接点尽可能小,进而减小料斗转动惯量,降低料斗翻转振动。
通过增加阻尼消除翻转启停冲击,设置料斗旋转阻尼为100、400、700、1 000 N·m/(r/min)进行仿真,得到如图7所示的料斗翻转阻尼对翻转角度的影响。
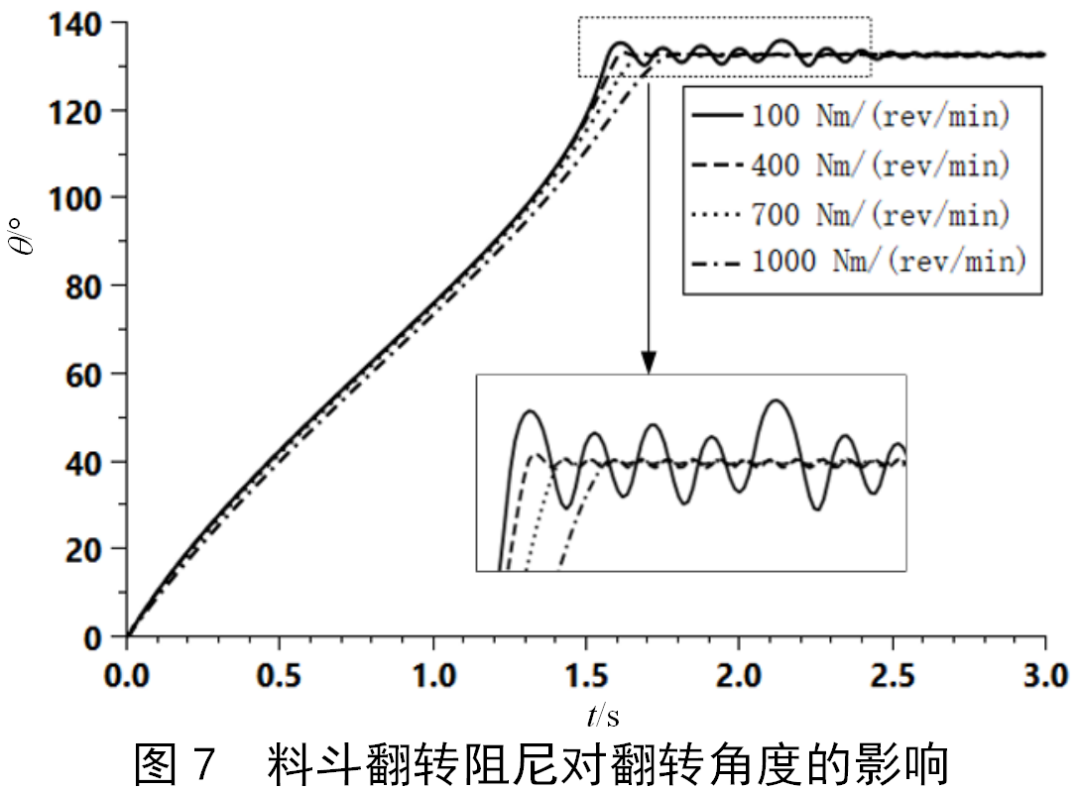
由图7可知,当料斗翻转阻尼为400 N·m/(r/min)以上时,料斗翻转停止波动基本消除。
设置PID控制器微分项系数分别为0.01、0.1、1、5进行仿真,得到如图8所示的PID微分项系数对翻转角度的影响。
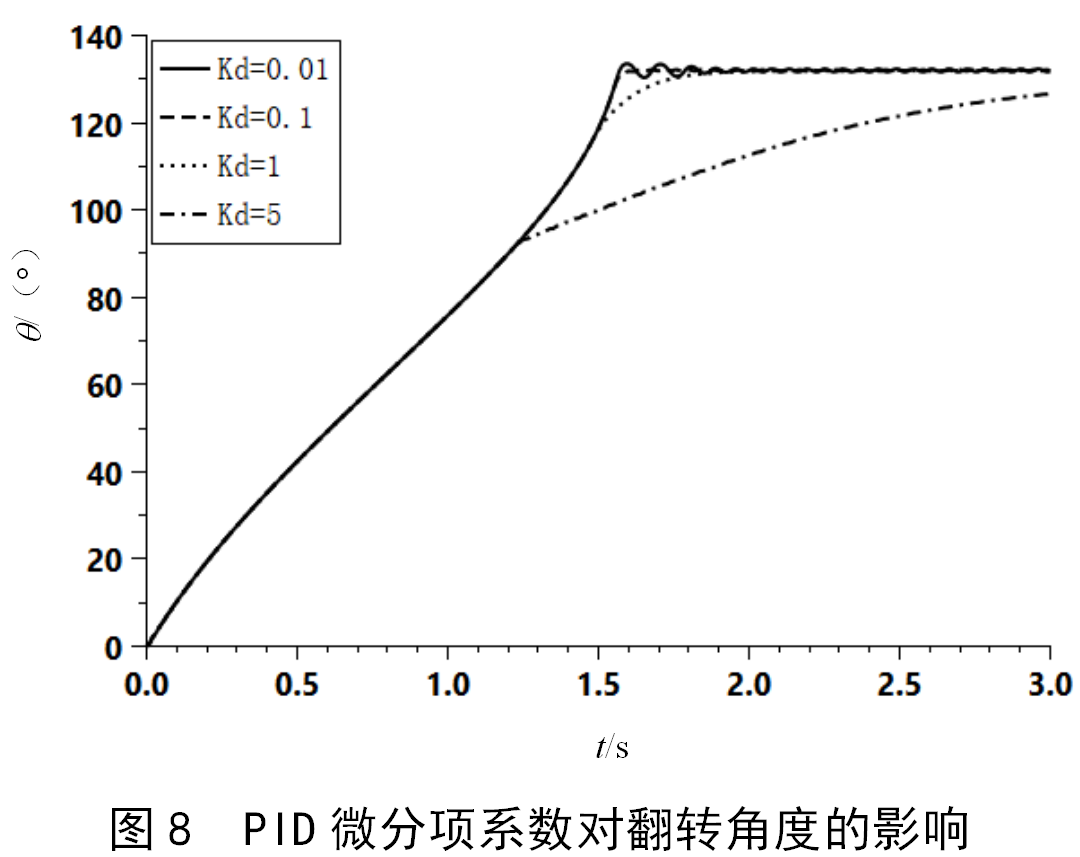
由图8可知,增大PID微分项系数,料斗翻转停止冲击逐渐消除,当微分项系数为0.1时,料斗翻转波动得到有效控制。
5
结论
传统密炼机料斗机械翻转驱动力由电机带动蜗轮蜗杆传动装置提供,机器长时间工作会因粉尘污染导致负载增大,进而造成蜗轮蜗杆传动卡死,烧坏电机。针对此不足,采用液压控制油缸提供料斗翻转驱动力,设计了一种密炼机料斗液压翻转角度PID闭环控制系统,对料斗翻转角度、翻转速度、液压缸位移及液压缸速度变化情况进行了仿真,重点研究了基于角度控制料斗翻转特性的影响因素及其规律,对液压控制式密炼机料斗翻转装置研制具有理论指导意义,主要得出以下结论:
(1)减小料斗转动惯量、增大料斗旋转阻尼,料斗翻转振动得到有效控制;
(2)PID微分项系数选取0.1,料斗翻转角度曲线稳态误差较小。
审核编辑:刘清
-
江铃全顺轻型客车液压悬置系统隔振特性研究2006-01-01 503
-
基于组态王6.5的实验型密炼机控制系统2009-04-11 535
-
基于PLC的全液压推土机行驶控制器研究2010-04-02 463
-
密炼机的推断控制系统2010-10-07 1412
-
高速液压伺服控制器中的应用研究2016-04-06 731
-
汽车电动液压助力转向电子控制系统的研究2016-04-26 857
-
短间隙磁控放电离子电流特性及影响因素研究2017-01-04 668
-
ESP液压控制系统的研究2017-09-07 956
-
船用舵传动装置试验及液压控制设计2018-03-01 825
-
液压滑阀配合间隙含颗粒油液的泄漏特性研究2018-03-05 705
-
水液压比例阀的动态特性仿真2018-03-07 739
-
液压平衡阀主阀芯节流槽静态特性研究2018-03-19 946
-
密炼机的基础知识2022-07-06 167
全部0条评论

快来发表一下你的评论吧 !
