

新能源汽车驱动系统控制之VCU核心功能
汽车电子
描述
新能源汽车电动化的动力总成增加了很多高低压电气部件(如图1)。
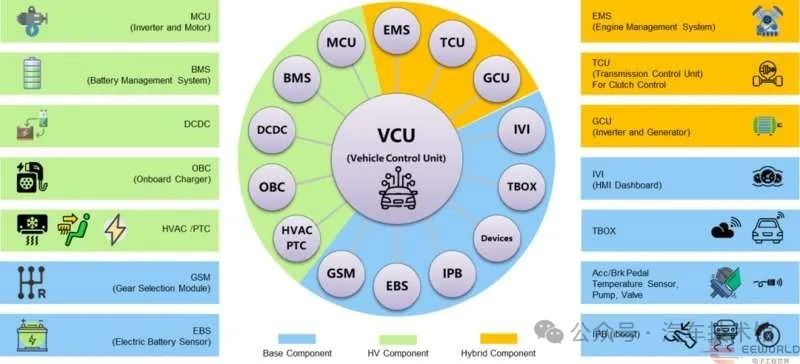
图1 VCU是新能源汽车驱动系统控制的“大脑”,成熟的系统软件在提高运行效率、降低能耗排放、提高故障后处理的鲁棒性等方面都发挥着重要作用。是电动化动力总成系统解决方案真正落地的核心能力之一。 作为车辆驱动协调控制系统的核心控制器,VCU需要负责整车状态协调、驾驶员驾驶需求实现等最基本也是最重要的功能。因此VCU软件的完善度直接影响了车辆运行的稳定性和行驶安全性。随着“域融合”的概念推广,越来越多的新功能也逐渐被融合到VCU控制器中,例如:跟充电相关的AC/DC车辆端充电主控功能,以及跟底盘相关的电动四驱控制功能。 从系统功能划分角度考虑,可以把VCU的功能划分为:车辆系统、传动系统、电力系统、热管理系统,以及OBD诊断、通讯、安全监控等系统功能。VCU的主要功能如下图2。

图2 VCU系统功能分类和概览 VCU软件核心功能介绍 基于多个已经量产的客户项目,经过多年的系统知识建立和功能软件开发验证工作,目前联合汽车电子的VCU软件已经在“扭矩”“电”“热” 三个核心领域都具备完整的并且可根据客户需求灵活配置的VCU系统解决方案。本文会主要围绕与“扭矩”相关的车辆驱动方面介绍一些VCU软件中的核心功能。后续还会有其它文章介绍与“电”“热”相关的核心功能介绍。 支持多模式的车辆运行模式管理功能(混合动力) 混合动力车辆的运行模式决策和切换过程控制可以实现:纯电运行、串联增程、并联驱动三种运行模式决策和切换(图3)。
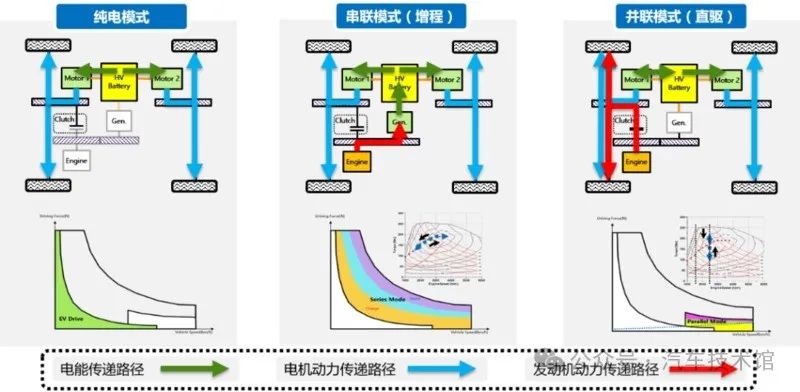
图3 混动运行模式和能量流 整车运行模式决策功能基于ECMS(等效燃油消耗最小)算法(图4),在各种工况下决策出能量消耗最小的运行模式(图5)并实现电机/发动机最优能量分配比例,以达到更好的动力性和经济性:在中低速时通过增程器发电,使发动机始终工作在高效区并为动力系统提供动力源;在高速时让发动机和电机共同驱动车辆行驶,满足动力性和经济性需求。该模式决策相比行业中应用广泛的基于规则的能量管理策略,ECMS能够达到更好的节油效果,与全局优化策略和基于工况自适应的能量管理策略相比,ECMS能够更好应用于实际工程项目中。

图4 混动模式管理功能架构
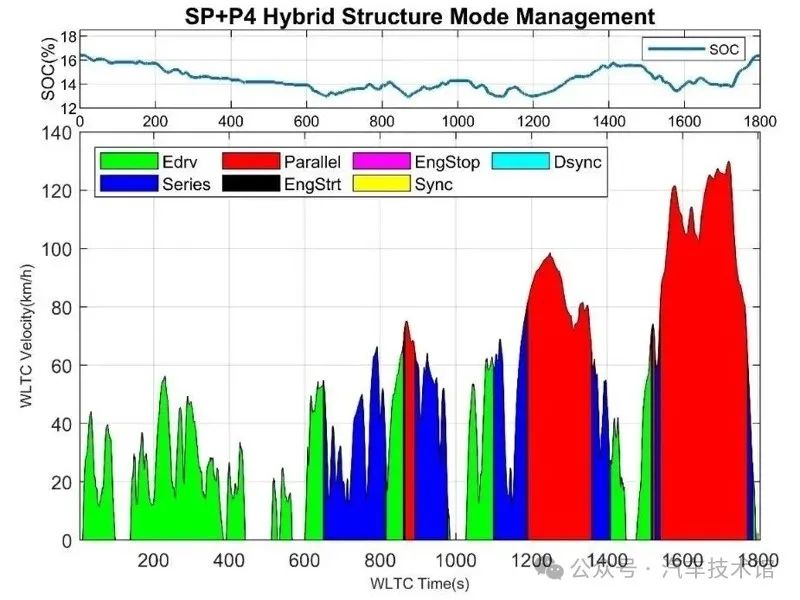
图5 WLTC循环中模式分布 当车辆运行工况发生变化车辆运行模式需要切换时,模式切换过程控制功能可以确保在不影响驾驶员驾驶需求扭矩实现的前提下,VCU通过协调发动机、增程器、驱动电机和离合器之间的转速和扭矩配合,实现快速平稳的模式切换控制过程(图6)。
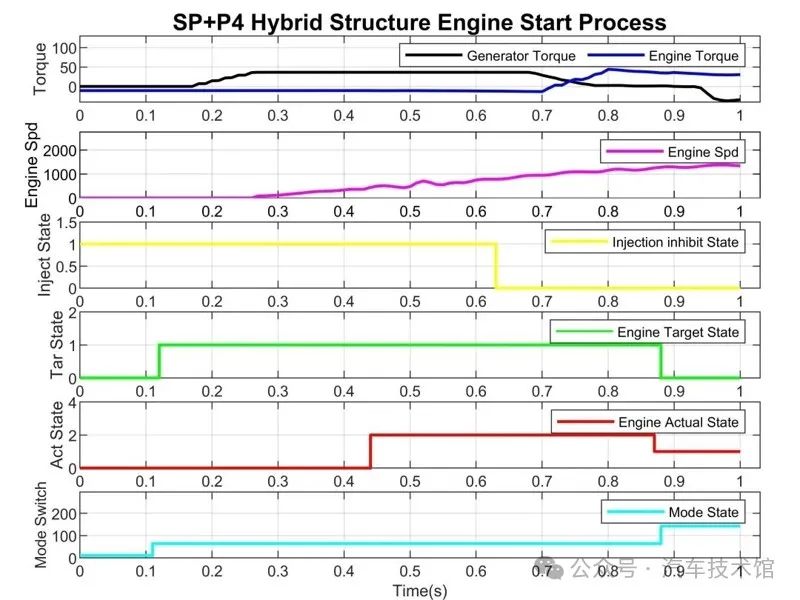
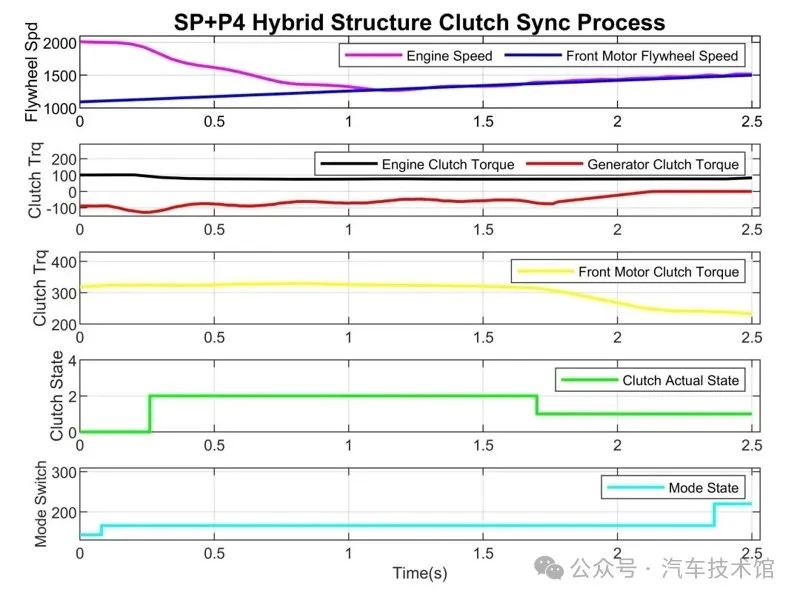
图6 模式切换过程测试效果 基于部件物理层级的扭矩管理 扭矩管理需要协调来自驾驶员、驾驶辅助功能的驱动和制动扭矩需求,并可以根据整车运行模式功能和模式切换功能的输出,协调各驱动部件(发动机、发电机、前驱动电机、后驱动电机)准确响应各种来源的扭矩需求。 已开发应用的扭矩管理功能实现了可灵活配置拓展的扭矩结构(图7),可支持纯电、混动项目,四驱/两驱项目的灵活配置。基于实际部件物理层级的扭矩结构,也更易于拓展应用到其它拓扑结构的混合动力/纯电车辆。
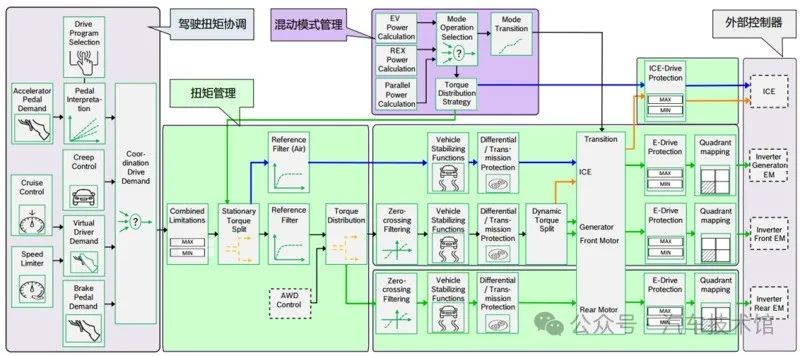
图7 扭矩管理示意图 多种分配方式的四驱控制功能 四驱控制功能是将驾驶员需求扭矩按照当前四驱控制需求进行前后轴扭矩分配,最终输出至前后驱动电机,四驱控制功能在分配前后轴扭矩时能够充分考虑不同因素的影响,兼顾整车的经济性,动力性和操纵稳定性。也可以识别车辆的运动趋势,主动介入车辆的运动控制,实现无级全范围分配比调节(图8)。
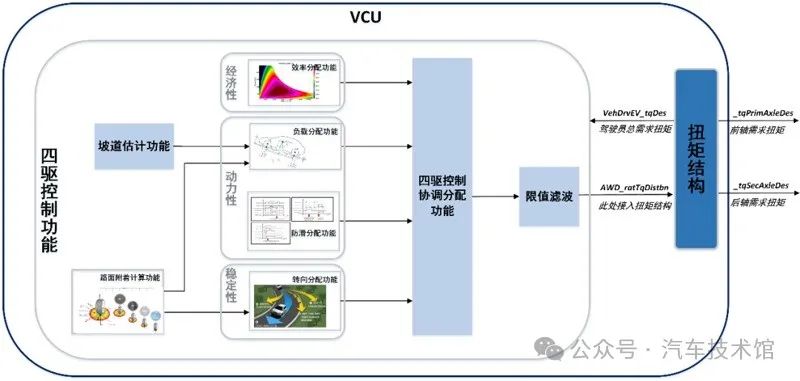
图8 四驱控制功能架构 四驱经济性分配功能可以在平稳驾驶的过程中使前后轴驱动电机工作在当前需求下的系统整体效率最优点,实现双电机、三电机及四电机的效率最优分配,降低能耗增加续航里程。 四驱动力性分配中的负载分配功能可以通过识别当前路面坡度及车辆加减速情况,建立前后轴载荷模型计算前后轴扭矩的最佳分配比,在载荷转移时通过前后轴扭矩智能分配充分利用地面最大附着力,减少车轮滑转提高车辆加速能力(图9)。
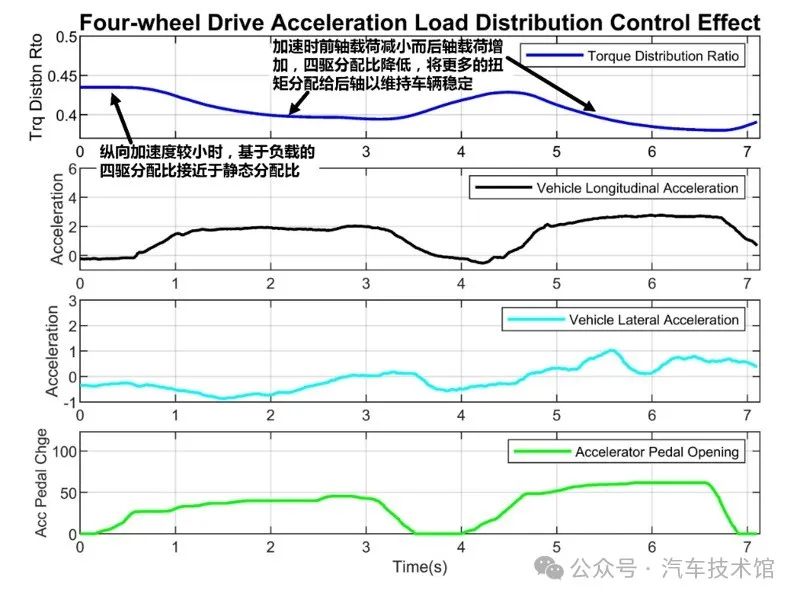
图9 加速负载转移四驱分配测试效果 四驱动力性分配中的脱困防滑功能能够在车辆单轴处于滑转状态时主动调整前后轴扭矩分配向未滑转轴转移,降低动力损失,在识别到前后轴交替滑转时,动态控制前后轴扭矩分配,充分利用路面附着系数,提高车辆在低速时的脱困能力,降低无力感,提升驾驶舒适性。(图10)
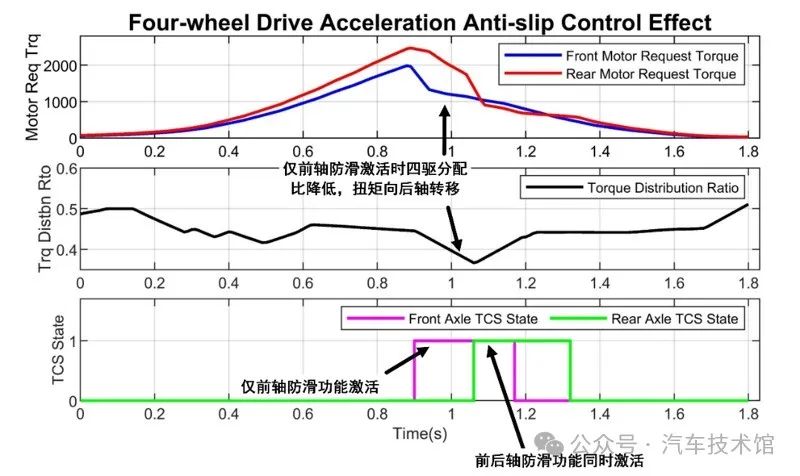
图10 驱动防滑功能测试效果
四驱操纵稳定性分配使汽车跟随驾驶员转向意图,提高转向敏捷度,主要包含转向状态监测与转向扭矩控制。可以在ESP介入前通过前后轴扭矩分配实时调整车辆运动姿态,及时抑制车辆转向不足(US)和转向过度(OS)的失稳状况发生,在加速转向工况降低ESP的介入频次,减少制动冲击与横摆感,提高驾驶员的驾驶感受(图11)。
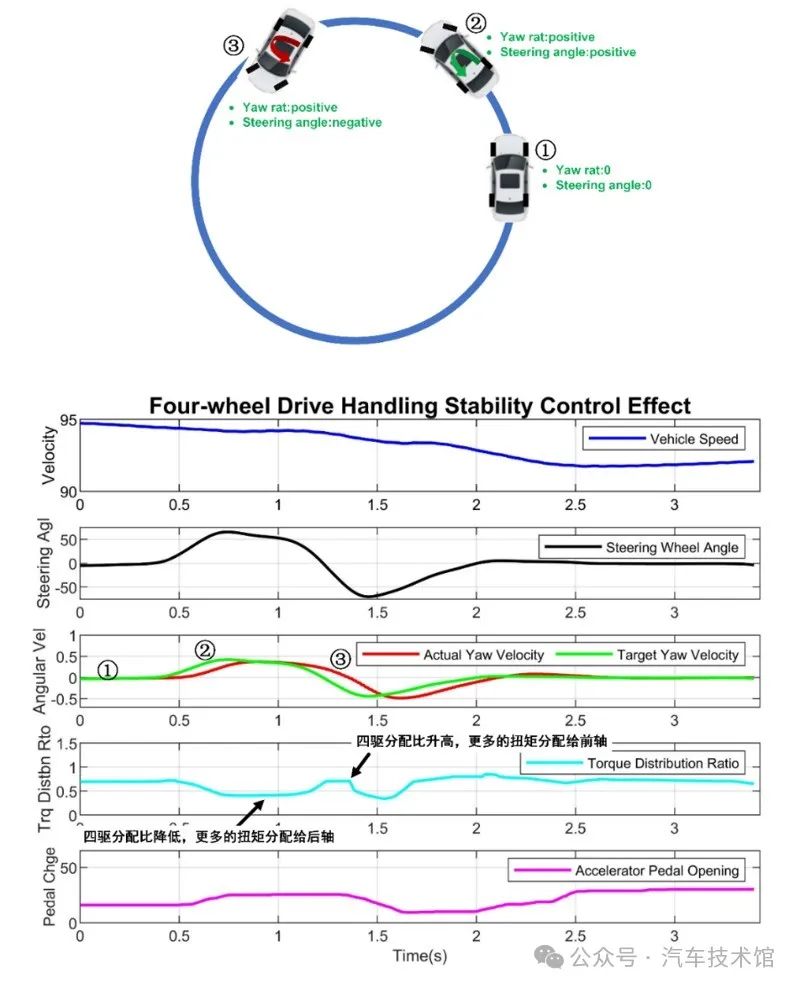
图11 OS及US工况下的稳定性控制 四驱控制功能具有很强的扩展性和通用性,在EV和PHEV车辆上都可以使用。该方案将动力域与底盘域的部分相关控制功能进行了整合,提高了车辆运动相关的跨域整合能力。
审核编辑:黄飞
-
新能源汽车整车控制器(VCU)铝电解电容2025-11-10 900
-
新能源汽车核心技术加油站-VCU2024-04-20 1175
-
从0到1实现VCU:新能源汽车整车控制器2024-02-24 3555
-
新能源汽车vcu作用及功能是什么2023-08-09 3620
-
新能源车整车控制器(VCU)系统功能拆解2023-06-07 1814
-
VCU(整车控制器)简介2021-08-31 5491
-
新能源汽车的驱动电机控制电流2021-08-27 2357
-
为什么说新能源汽车的核心是IGBT?2021-03-08 4710
-
新能源汽车MCU常用的参数2021-01-29 4389
-
新能源汽车整车控制器介绍2021-01-04 6064
-
新能源汽车整车控制器VCU快速开发平台的系统组成2020-08-19 2440
-
新能源汽车电控系统VCU开发平台的组成结构2020-06-18 2996
-
新能源汽车核心技术详解:电池包和BMS、VCU、 MCU2017-08-11 9002
-
中国新能源汽车驱动发展2016-01-27 6712
全部0条评论

快来发表一下你的评论吧 !
