

基于紫光FPGA的CAN控制器系统架构
接口/总线/驱动
描述
CAN 是 Controller Area Network 的缩写,是ISO国际标准化的串行通信协议。CAN总线协议已成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。为了满足应用需求,紫光同创基于自研FPGA芯片可提供符合CAN协议标准的解决方案。
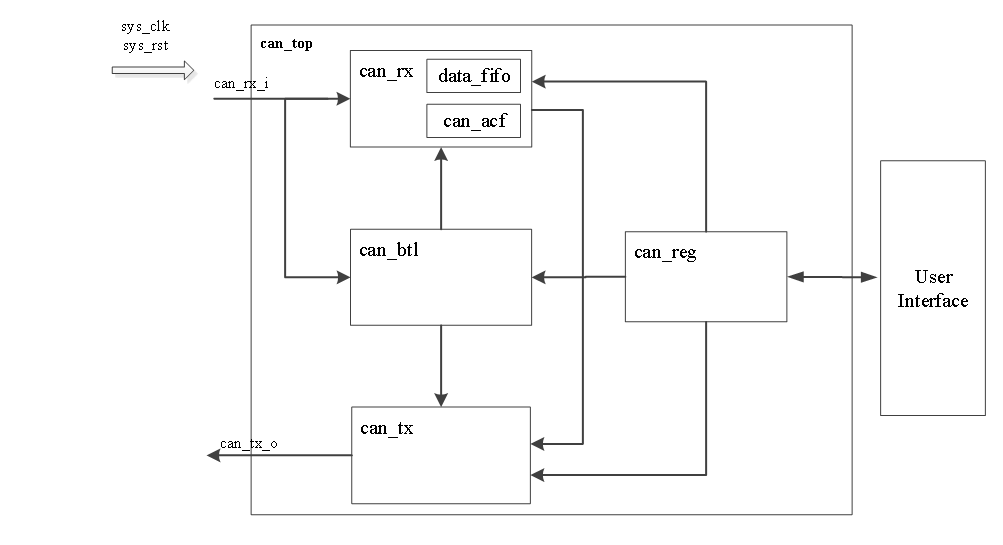
CAN控制器系统架构
can_reg:通过用户接口管理配置,控制CAN寄存器的寻址。向位时序模块、can发送模块和can接收模块提供配置信息和操作指令,并接收来自can接收模块的状态信息。
can_btl:监视串行CAN总线并处理总线相关位时序,完成硬件同步和在同步。用于补偿CAN网络上的物理延迟和因时钟频率偏差、传送延迟等所产生的误差。
can_tx:向CAN总线发送数据信息。同时完成CAN节点的仲裁判定、填充位增加、CRC位计算和插入等功能。
can_rx:接收CAN总线上的信息。同时完成CAN节点的错误检测、ACF过滤、CRC检测校验、填充位删除等功能。

方案演示开发板
基于紫光同创FPGA芯片,外接CAN透传模块(实现差分电平转换),可实现和第三方调试器USB CAN的通讯。
CAN信息发送帧
CAN信息接收帧
FPGA侧向第三方调试器发送信息帧,第三方软件正常接收信息帧,通过第三方调试软件可以观察接收到信息帧的打印,对比得第三方调试器接收信息帧类型、数据帧数据内容与FPGA发送一致。
第三方调试器向FPGA侧发送信息帧,此时通过FPGA侧串口读取缓存的信息帧,对比得FPGA侧接收信息帧类型、数据帧数据内容与第三方调试器发送一致。
基于紫光同创FPGA芯片的CAN控制器符合CAN2.0协议标准,目前已经覆盖公司全系列产品,可支持从125kbps至1Mbps的通信速率,支持所有类型的错误检测等等,广泛应用于工业自动化、医疗设备等场景的应用。
审核编辑:黄飞
-
基于FPGA的CAN总线通信系统2012-08-11 4944
-
CAN总线的系统架构2021-08-19 2060
-
基于STM32和FPGA的CAN总线运动控制器的设计2013-01-31 1416
-
FPGA实现CAN总线控制器源码2016-06-07 1177
-
基于FPGA和CAN控制器MCP2515设计惯导系统的CAN总线2016-07-13 1721
-
基于DSP_FPGA与CAN总线的跟踪控制器设计2017-10-21 973
-
基于FPGA的CAN总线控制器SJA1000软核的设计方案解析2017-12-07 3179
-
基于FPGA与CAN总线控制器的自适应汽车前照灯系统的设计2018-12-10 4669
-
如何使用FPGA进行CAN控制器软核的设计与实现2019-07-19 1876
-
如何使用FPGA和CAN控制器MCP2515实现惯导系统的CAN总线接口的设计2021-01-27 2297
-
CAN控制器和收发器2021-12-04 2495
-
如何用FPGA实现CAN总线通信控制器2022-07-29 3764
-
基于FPGA的CAN总线控制器的设计2023-05-18 2908
-
基于FPGA芯片的CAN控制器系统设计2024-01-12 2534
-
CAN收发器与CAN控制器的区别2024-05-28 6503
全部0条评论

快来发表一下你的评论吧 !
