

基于非线性自适应学习控制器的四轴飞行器避障方案
军用/航空电子
描述
0.这篇文章干了啥?
这篇文章主要研究了四轴飞行器在避开障碍物时的运动控制问题。他们提出了一种新的设计方案,基于低成本的动态线性优化,针对不确定条件下的障碍物进行自适应学习控制。首先,他们提出了一种针对无人机模型的非线性变量增益PID(NLVG-PID)控制器。其次,他们采用极值搜索(ES)算法来学习在离线最大或最小误差阶跃信号中的最佳NLVG-PID参数。最后,他们进行了数值模拟实验,并表明所提出的自适应学习控制器可以减少在典型3D路径曲线(如风暴路径)中的响应超调和稳定时间。
下面一起来阅读一下这项工作~
1. 论文信息
论文题目:Low-cost adaptive obstacle avoidance trajectory control for express delivery drone
作者:Yanhui Zhang, Caisheng Wei等
作者机构:School of Aeronautics and Astronautics, Zhejiang University等
2. 摘要
本文研究了用于快递投递的四轴飞行器障碍物避障轨迹控制(OATC)问题。提出了一种新的非线性自适应学习控制器,该控制器成本低廉且适用于不同轮距大小的无人机,以适应无人机投递任务中的大角度机动和负载变化。该控制器由非线性可变增益(NLVG)函数和极值搜索(ES)算法组成,以减小超调和稳定时间。最后,在四轴飞行器上进行了模拟实验,验证了所提出的控制方案在两种典型的无碰撞轨迹下的有效性。
3. 效果展示
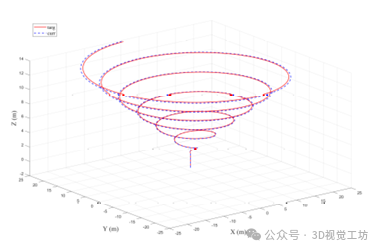
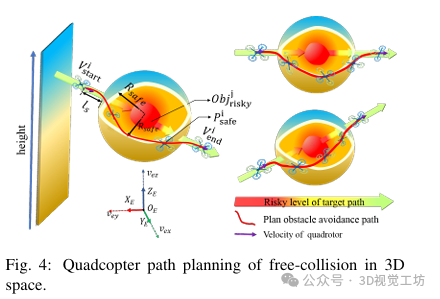
3D视图中的风暴类型障碍物避让路径。
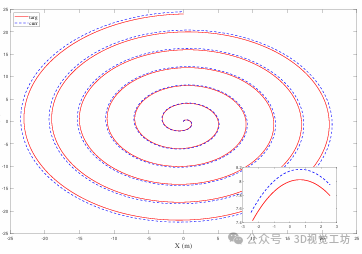
在X-Y视图中的风暴类型障碍物避让路径。
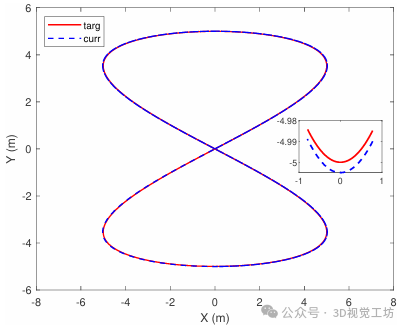
3D视图中的利萨茹型路径。
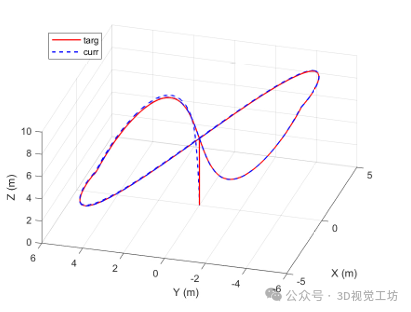
X-Y视图中的利萨茹型路径。
4. 主要贡献
分析了固定增益PID控制器的结构以及非线性动力学和运动学模型。
设计了一个适用于递送四轴飞行器的NLVG-PID控制器,并引入了极值搜索来学习在边界条件下的最优非线性PID参数。据作者所知,这是第一个在递送无人机中使用的NLVG-PID障碍物避障控制器。
在四轴飞行器上进行了模拟实验,验证了所提出的控制方案在两种典型的无碰撞轨迹下的有效性。
5. 基本原理是啥?
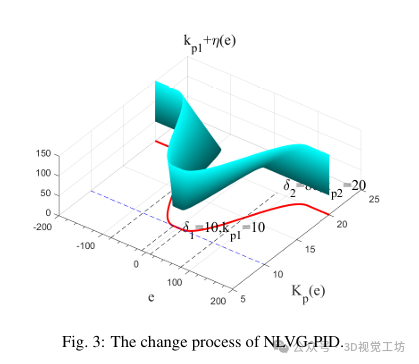
这篇文章的基本原理是通过设计一种新颖的非线性自适应学习控制器,用于快递四轴飞行器的障碍物避免轨迹控制问题。该控制器结合了非线性可变增益(NLVG)函数和极值搜索(ES)算法,以适应无人机快递任务中的大角度机动和负载变化。NLVG函数用于替代传统固定增益PID控制器中的固定增益项,以提高控制器对不同大小误差的快速控制能力。ES算法用于学习在边界条件下的最佳非线性PID参数。通过这种方式,文章提出的控制方案能够有效地实现四轴飞行器在两种典型的无碰撞轨迹下的障碍物避免控制。
6. 实验结果
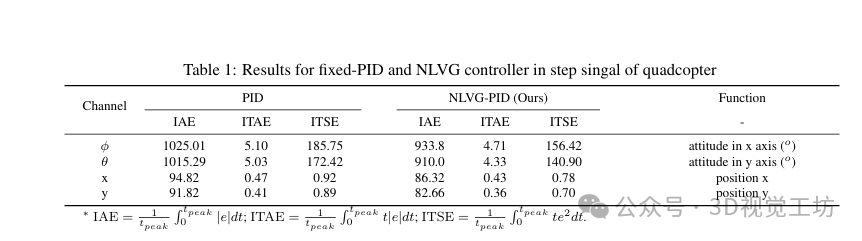
本文通过模拟实验验证了NLVG-PID控制器在四轴飞行器的障碍物避让轨迹控制中的有效性。实验结果如下:
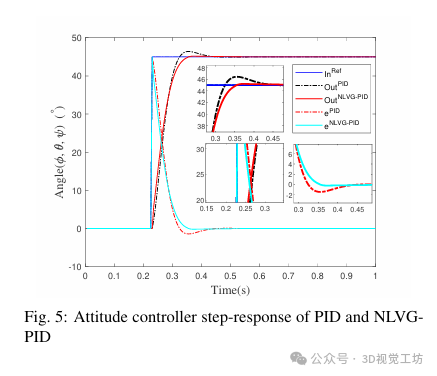
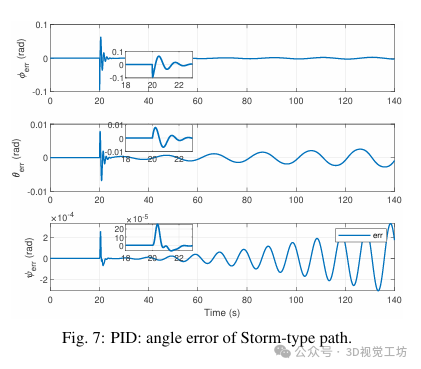
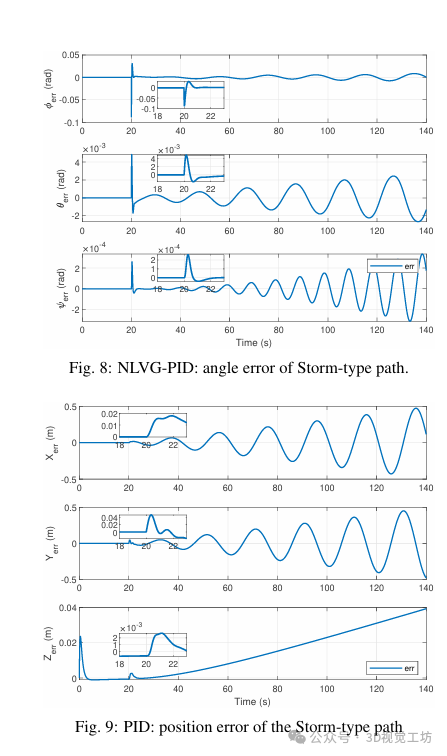
风暴路径跟随实验:在设计的风暴路径下,NLVG-PID控制器在姿态角和位置控制方面表现出色。与PID控制相比,NLVG-PID控制器能够更快地收敛到期望轨迹,并且在动态干扰下表现更加稳定。通过欧拉角和位置误差的分析,可以看出NLVG-PID控制器对于复杂路径跟踪具有良好的性能。
利萨茹曲线跟随实验:在3D利萨茹曲线路径下,NLVG-PID控制器同样展现出了优秀的控制性能。虽然路径更加复杂,但NLVG-PID控制器仍然能够快速且稳定地跟踪期望轨迹,姿态角误差和位置误差得到了有效控制。
综上所述,NLVG-PID控制器在四轴飞行器的障碍物避让轨迹控制中具有良好的性能,能够适应复杂的飞行环境并实现精确的轨迹跟踪。
7. 总结 & 未来工作
本文研究了四轴飞行器障碍物避让的主动运动控制问题。提出了一种基于低成本动态线性优化的自适应学习控制器设计方案,用于处理不确定条件下的障碍物。首先,提出了一种针对构建的无人机模型的 NLVG-PID 控制器。此外,采用 ES 方法在离线最大或最小误差阶跃信号中学习最优 NLVG-PID 参数。基于这一设计进行了数值模拟,结果表明,所提出的自适应学习控制器能够减少典型 3D 路径曲线(如风暴路径)中的响应超调和稳定时间。
审核编辑:黄飞
-
智能避障手势感应四轴飞行器方案选择及电路设计2021-07-22 2904
-
如何基于STM32的四轴飞行器进行学习2020-01-09 8107
-
【设计技巧】四轴飞行器姿态算法2019-07-14 3251
-
如何学习制作四轴飞行器2019-04-03 2866
-
STM32完整学习资料(四轴飞行器)2018-06-28 4072
-
四轴飞行器如何对频_四轴飞行器怎么操作2018-03-28 101783
-
大热的四轴飞行器设计_软硬件参考方案2018-02-20 2626
-
四轴飞行器组合导航非线性滤波算法2016-05-16 1126
-
四轴飞行器控制原理2016-04-28 1269
-
四轴飞行器的设计与研究2016-03-21 1474
-
非线性滤波在四轴飞行器中的应用2015-12-31 7508
-
如何学习自制四轴飞行器?2015-07-10 19592
-
四轴飞行器毕业设计_四轴飞行器源代码_四轴飞行器制作教程2015-05-08 14777
-
半智能四轴飞行器设计2013-10-28 2569
全部0条评论

快来发表一下你的评论吧 !
