

基于ARM的汽车“黑匣子”设计
ARM
描述
汽车行驶记录仪俗称汽车黑匣子,是一种能够对车辆行驶速度、时间、里程以及其他状态信息进行记录的电子装置。本文设计的基于TI 公司的TMS470R1A256 汽车行驶记录仪可以记录汽车行驶的状态,并对通过汽车行驶状况的记录分析、鉴定道路交通事故,提高交通管理执法水平和运输管理水平,保障车辆运行安全具有重要作用。文中主要给出了系统的硬件设计及主程序的软件设计。本文在传统记录仪的基础上,增加GPRS , GPS及USB 主机等功能,实现对正在行驶的汽车进行远程监控、卫星导航等功能。
1 "黑匣子"的分类
由于各研制生产厂家的出发点不同,因而产品的类型不同,产品结构形式也不尽相同。目前市场上的记录仪己形成了一个种类繁多、性能不一的产品格局。汽车行驶记录仪根据其功能不同可以分为单一型、事故型、管理型、综合管理型和3G型。
3G型是从软件、硬件和系统功能上进行了优化设计,以综合管理为主要目地而开发的新一代汽车行驶记录仪。主要特征是多通道数据采集处理,全程连续记录,大容量存储卡和强大的综合管理软件系统,实现资源共享。此类型记录仪利用多通道数据采集处理平台、GPS 卫星定位仪、大容量数据存储卡、日趋成熟的地理信息系统和后台综合管理平台软件等强有力的现代化技术手段,重点针对营运和特种车辆的综合化管理目标,来完成车辆综合化管理进程。可通过在微机软件介面上重放的全程连续记录曲线和各开关传感器的连续状态,对车辆的营运、安全、质量等综合指标进行强有力的全程监控,根据需求打印统计图表,并采用动态分析方式,为驾驶员的安全驾驶提供极高价值的参考。
本文介绍的就是基于ARM 的3G型汽车"黑匣子"的设计。
2 系统总体设计
本系统包括记录仪车载端主机和监控软件组成。其中主机采用TI 公司32 位的RISC 微处理器TMS470R1A256 作为主控制器,包括基本记录模块、显示模块、打印机模块、GPS 模块、GPRS 模块、数据通讯模块。系统整体设计框图如图1 所示。
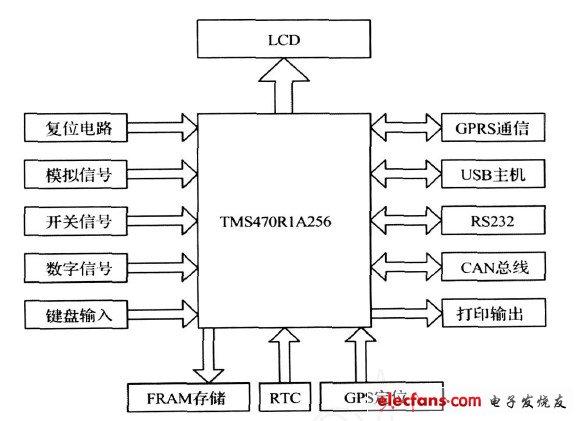
图1 系统原理框图
系统通过TMS470R1A256 对外部模拟信号输入、数字信号输入以及开关量输入三种信号分别进行采集。需要保存的数据经过处理后存储于内部大容量存储器中,实时数据(如实时车速、实时时问) 及报警信号等可通过显示面板输出显示。GPS模块对经纬度,速度进行测量,通过GPRS 实现远程监控和实时跟踪。
3 系统硬件设计
3. 1 TMS470R1A256.
TMS470R1A256 是TI TMS470R1 x 通用16/32 位精简指令( RISC) 微控制器的系列产品。
TMS470R1A256 主要包含以下资源: 256 KBFlash、12 KB SRAM、零管脚锁相环(ZPLL) 时钟模块、模拟看门狗(AWD) 定时器、实时中断(RTI) 、串行外围接口( SPI) 、串行通信接口( SCIx) 、标准CAN 控制器( SCC) 、二类串行接口(C2Sib) 、外部时钟分频器( ECP) ,10 位多缓冲ADC(MibADC) 、16 输入通道、高端定时器( HET) ,多达49 个I/ O口和一个只输入口。
TMS470R1A256 的Flash 存储器是非易失性的、电可擦除的,可编程的存储器,并具有32 位宽的数据总线接口。Flash 操作以系统时钟频率进行, 可达24MHz.在管道模式下, 频率可达48 MHz.
SCI 是全双工的、串行I/ O 接口,实现了CPU与采用标准不归零制(NRZ) 格式的外围设备间的异步通讯。SCC 利用串行的、多主机通信协议实现了高效的分布式实时控制和高达1Mbit/ s 的稳定通讯。SCC 是高噪声和恶劣环境中,要求可靠串行通信和多道通讯应用的理想选择。C2Sib 使TMS470R1A256 可以在遵循SAEJ I850 协议标准的二类网络中发送与接收信息。
3. 2 TMS470R1A256 与MC33993 之间的通信
美国MO TOROLA 公司推出的可编程多路开关检测接口集成电路MC33993 可检测多达22 路的开关量输入信号,并可将检测到的多路开关状态(三态) 信号通过该芯片的SPI 口传送给MCU .此外,该器件还具有22 路模拟多路开关功能,可用以读取多路模拟输入信号。该模拟输入信号经缓冲器可由模拟多路开关输出以供MCU 读取。并且MC33993 可使得包括MCU 在内的整个系统能在一个较低的静态电流下工作这对远程监控之类的系统非常重要,因为对它们而言,电流损耗是重要的设计考虑。因此,本设计选用MC33993 作为多路开关检测接口电路。
系统中MC33993 采用SPI 与MCU 实现硬件连接,如图2 所示:当外部有开关量输入,状态发生改变时, MC33993 会发出中断信号IN T 给TMS470R1A256 , TMS470R1A256 响应中断读取开关量输入状态,从而提高MCU 的工作效率。
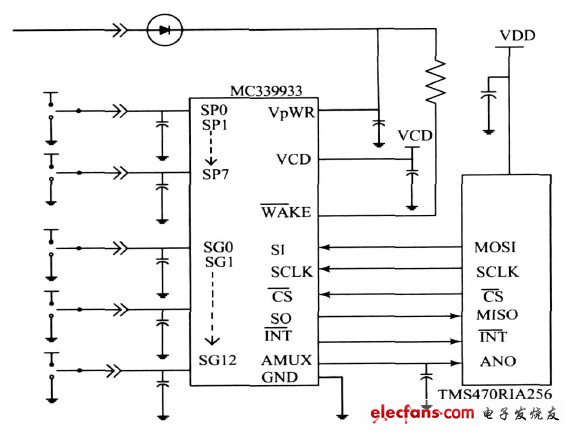
图2 MC33993 与TMS470R1A256 的硬件连接。
3. 3 TMS470R1A256 与FM24L256 之间的通信
在汽车行驶记录仪行业中,数据安全保存是最重要的。随着记录仪的发展,保存的数据量越来越大,这就需要大容量的存储器,而大容量的EEPROM 指标不是很高,尤其是擦写次数和速度影响电能表自身的质量。FM24L256 是由RAMTRON公司研制的新型存储器,它的核心技术是铁电晶体材料,拥有随即存取记忆体和非易失性存贮产品的特性。FM24L256 和A T24C256 容量等同,总线结构兼容, 但FM24L256 的性能指标远大于A T24C256 .
FM24L256 的通讯方式是双向两线协议,脚位少,占用线路板空间小。图3 描述了FM24L256 与MCU 硬件连接方式。

图3 FM24L256 与TMS470RIA256 的硬件连接
3. 4 TMS470R1A256 与SL811HS 之间的通信
本系统中USB 的主机通过主机控制器与USB设备进行数据传输。USB 主机应当具有: 检测USB 设备的插拔;管理USB 主机与USB 设备之间的控制流;管理USB 主机与设备间的数据流和收集USB 主机的状态等功能。
SL811HS 是CYPRESS 公司生产的、可支持全速数据传输的USB 控制芯片,且内含USB 主从控制器,支持全速、低速数据传输,并能自动识别低速或全速设备。SL811HS 所提供的接口遵从USB1. 1 标准,可与TMS470R1A256 微处理器相连。SL811HS 的数据接口与微处理器进行接口可提供8 位数据I/ O 或双向DMA 通道,并能以从机操作方式支持DMA 数据传输。SL811HS 内部有一个256 字节的RAM ,可用做控制寄存器或数据缓冲器。SL811HS 与TMS470R1A256 的硬件连接方式如图4 所示。
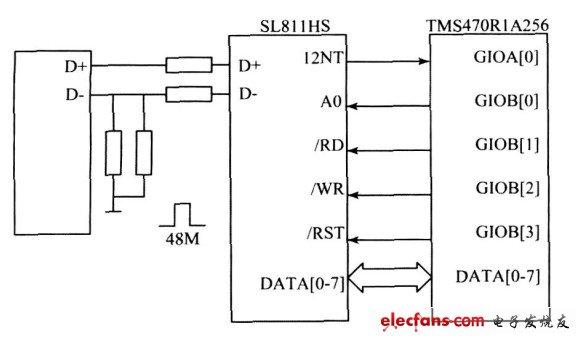
图4 SL811HS 与TMS470R1A256 的硬件连接。
3. 5 TMS470R1A256 与HOLUXGR285 之间的通信
HOLUXGR285 智能型卫星接收模组,采用美国瑟孚公司所设计的第二代卫星定位接收芯片,是一个完整的卫星定位接收器。具备全方位功能,能满足专业定位的严格要求与个人消费需求。适用范围从汽车导航、保安系统、地图制作等。
HOLUXGR285 通过RS2232 , TTL 与其它电子设备沟通,并以内建充电电池,存贮卫星资料。
其耗电量低,且能同时追踪12 颗定位卫星的讯号,每0. 1 秒接收一次,每秒更新一次定位信息。
HOLUXGR285 与TMS470R1A256 均为3.
3V 供电,故无需电平转换便可通过串行通讯口实现数据交换。硬件连接如图5 所示。

图5 HOLUXGR285 与TMS470R1A256 的硬件连接
3. 6 TMS470R1A256 与Benq M22 之间的通信
Benq M22 是一款内嵌TCP/ IP 协议栈,支持GSM/ GPRS CLASS4 , 可工作在EGSM900MHz ,DCS 1800MHz ,PCS 1900MHz ,可以支持数据业务的透明和非透明传输。从封装上来说,M22 使用连接座式接口,模块上自带天线MMCX 接头。由于支持GPRS 甚至拥有嵌入式的TCP/ IP ,可以用于实时性要求较高,数据量相对较大,传输速度相对较快的汽车行驶记录仪中。
Benq M22 和上位机的通讯数据接口为UART ,电平为TTL/ CMOS , 波特率为标称的300~115200bp s 的自适应波特率,只要是这个区间的标称波特率,模块自动识别,无须用户去干预,可以接成全串口或者半串口通讯。所谓的全串口,是指DB9 的九条线都需要接上,所谓的半串口则只接RXD , TXD 和GND 就可以进行通讯了。本系统采用半双工模式,则模块的RXD 可以直接连接TMS470R1A256 的TXD ,模块的TXD 可以直接连接TMS470 R1A256 的RXD ,如图6 所示。

图6 M22 与TMS470R1A256 硬件连接
4 系统软件设计
系统上电后,首先对系统进行初始化。然后进行自检,自检范围包括数据存储器、时钟和I/ O 口,自检后根据自检结果在显示器上显示相关信息。
如果自检不通过,显示"自检不正常"和错误代码。
自检通过后,然后进入驾驶员身份认证,通过后,LCD 显示相关数据,等待数据刷新。系统主程序流程图如图7 所示。

图7 系统主程序流程图
4. 1 数据采集
记录仪读取到原始数据后,根据脉冲量和车辆特征系数等能够计算出总累计行驶里程、最近2 个日历天的累计行驶里程、最近360 小时内的累计行驶里程、每200 毫秒的速度和每分钟的速度。
记录仪采集的脉冲来自于速度传感器,该速度传感器每转产生8 个脉冲,而车辆在每公里使速度传感器旋转的转数由车辆特征系数决定。记录仪根据所记录的脉冲数,可以得到车辆行驶的里程。
由脉冲数计算出行驶速度,只要先由脉冲数计算得到里程数,再除以时间,即可得到速度。
4. 2 GPRS 设计
M22 支持GPRS CLASS4 , 即下行速度42. 8 Kbp s ,上行速度21. 4 Kbp s.同时,M22 也支持嵌入式的TCP/ IP 协议。这个嵌入式的TCP/ IP协议解决了从命令模式连接到数据传输模式的一个比较复杂的过程。
因为有了嵌入式的TCP/ IP ,所以可以实时的传输大量汽车记录数据,实现实时监控车辆的运行情况。使用TCP 协议进行数据通信时,必须要经过三个阶段,第一个阶段是连接建立阶段,第二个阶段是数据收发阶段,第三个阶段是连接释放阶段。
本系统中发送短消息采用而PDU 模式,因为它不仅支持中文短信,也能发送英文短信。PDU模式收发短信可以使用3 种编码: 72bit 、82bit 和UCS2 编码。
5 结 论
本设计是在传统记录仪上,添加GPS , GPRS模块,并对该系统进行测试的结果是能够实现精确定位(民用标准) 、远程监控、电子狗及数据传输等功能,实现了基本记录仪与GPS 导航一体化,满足系统的设计要求。
-
求购汽车黑匣子方案2010-10-08 904
-
车载行车记录功能-汽车黑匣子2012-02-24 7549
-
新手求教汽车黑匣子系统该如何设计?2021-04-22 1835
-
请问如何去设计一种汽车黑匣子系统?2021-05-14 1892
-
基于Zigbee的汽车无线黑匣子设计2011-09-13 812
-
基于ARM的汽车黑匣子设计2012-05-24 2377
-
汽车行驶记录仪(汽车黑匣子)2017-01-14 1374
-
运用核心器件打造属于自己的爱车黑匣子2017-11-20 1157
-
飞行记录仪为什么称为“黑匣子”呢?它是怎么制造的?2018-06-25 9450
-
一文读懂“黑匣子”!黑匣子的发展历史2019-04-01 12681
-
智能驾驶的黑匣子——华为数据管理方法2020-12-10 1652
-
飞机黑匣子为什么难成为“云匣子”?云匣子的天梯2022-03-30 3681
-
黑匣子如何定位、打捞2022-07-30 2491
-
“黑匣子”:飞行见证者2022-04-27 1819
-
基于ARM的汽车黑匣子电路设计2023-10-11 500
全部0条评论

快来发表一下你的评论吧 !
