

嵌入式超声波测距系统的实现方案
嵌入式设计应用
描述
目前所研究的超声波测距传感器测距范围普遍较小,线性度和重复性较差。文中所提出的研究方法能很好的解决这2 个问题,在保证线性度和重复性均不低于1. 5‰的前提下,测量范围达到了5 m 以上。为了增大超声波发射功率和准确接收回波信号,在分析超声波测距误差原因和考虑软、硬件成本的基础上,提出了一种以C8051F320 微控制器、反激变换器和专用集成电路PW0268 为核心器件的超声波测距系统及其硬件和软件的设计方案。系统中还集成了声速的温度补偿、串行输出和LCD 显示等功能,能实时修正超声速度和显示测量值。实验结果表明,该超声波测距系统具有测量数据准确,线性度高、重复性好、迟滞小、成本低等优点,可广泛应用于工业中非接触测距场所。
1 超声波测距系统原理
目前超声测距的方法中,广泛采用的是回波时间法。该方法的主要原理是通过阈值比较或相位相关等方法检测换能器从发射超声波到收到回波信号的时间t,再根据测量时的超声波速度v,求出距离s. 计算公式是:

式中速度v 是环境温度T 的函数:

回波时间法测距的主要误差来源于声速的变化、回波信号的衰减以及接收阈值的设置。在测量回波时间上,阈值比较法测回波时间简单实用,但容易受到环境噪声的影响; 相位相关法相对于阈值比较法误差小,不容易受到外界噪声干扰,但是对微处理器的速度和存储有很高的要求,会增加硬件和软件的成本。
有别于回波时间法,另外一种广泛采用的测距方法是相位差法,主要是根据机械波的波动原理,2π 的相位变化对应的是机械波的1 个波长,根据发射波和返回波的相位差计算波长差,进而得到距离值。这种方法测量精度高,但仅限于距离在1 个波长范围内的测量,而且相位差的鉴别也会大幅度增加设计成本。
认真分析研究上述方法优缺点后,文中在脉冲时间法的基础上,利用阈值比较原理,超声波发射模块采用反激变换器提高超声波的发射功率,接收模块采用时控增益放大器准确获得回波信号,最后测算出距离值。采用这两种核心器件不仅使得测距系统电路结构简单,设计成本低,而且测量范围大,静态特性良好。
2 超声测距系统
超声波测距系统整体原理框图如图1 所示。超声波测距系统的主控部分是C8051f320 单片机,它是完全集成的混合信号片上系统型微处理器,具有高达25MIPS 的高速流水线结构的微控制器内核,拥有全速非侵入式的在系统调试接口。在超声波测距系统中采用这款微处理器的主要原因是它具有5 个捕捉/比较模块和具有看门狗定时器功能的可编程计数器/定时器阵列(PCA) ,这不仅使测算回波时间非常方便和准确,而且可以同时控制5 个超声波测距模块工作。
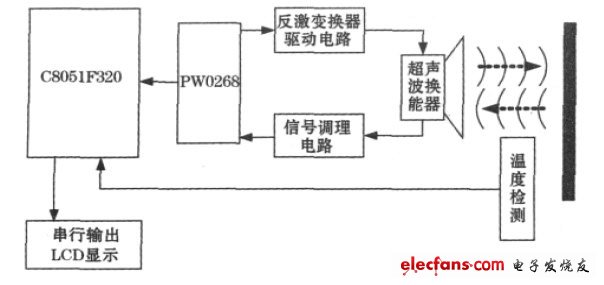
图1 超声波测距系统整体原理框图
该测距系统的发射与接收部分主要是由反激变换器和专用集成电路PM0268 构成的。反激变换器相对于正激式的变换器的主要优点是不需要输出滤波电感,这一点对减小变换器体积,降低成本很重要。PW0268 是超声波测距的专用集成电路,片内有两组可调式RC 振荡器,1个是系统参考时基,另1个是超声波振荡频率。超声波RC 振荡器具有自动变频的功能,可以修正因温度而造成换能器谐振频率的飘移。片内还集成了1 个32 阶增益的时控放大器,它可以方便的补偿超声波在波程中幅值的衰减。PW0268 还内置1 个仅需外加少量电阻及电容组成的带通滤波器,以及1 个高速比较器,可将放大后的回波信号转换成微处理器可处理的TTL 数字信号。
另外,由于集成了环境温度补偿和LCD 显示电路,该测距系统还具有声速实时补偿,测量结果实时显示等功能。
3 超声波测距硬件电路设计
超声波的发射与接收电路是超声波测距的核心电路,主要包括反激变换器驱动换能器电路和PW0268 外围电路的计算与设计。
3. 1 反激变换器驱动电路
在超声波发射电路中借鉴了开关电源中常用的反激变换器,对超声波驱动的电压信号进行了大幅度的抬升,使发出的超声波信号足够强以有利于回波信号的准确判断。驱动电路如图2 所示。40 kHz 的脉冲串通过控制场效应管不断地通断,使变换器原级电压耦合到次级完成电压抬升,驱动换能器发出超声波。其中,变换器的设计除了要考虑开关场效应管的最大电压应力,还要着重考虑变换器原、次级电流有效值、磁芯饱和度以及与换能器阻抗匹配等问题。
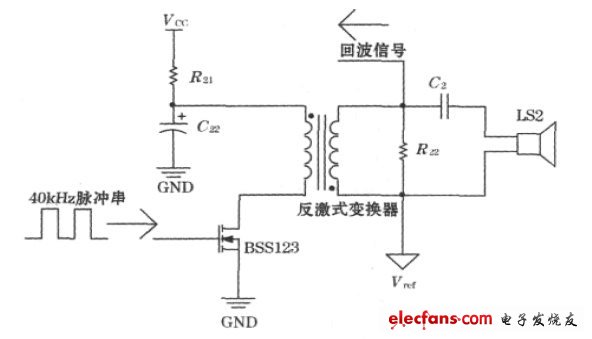
图2 反激变换器驱动电路
3. 2 PW0268 外围电路
PW0268 的I_O 管脚是双向管脚,当一短暂的低电平脉冲加在此管脚时,Driver_O 管脚开始输出超声波振荡驱动信号,之后PW0268 内部会启动1 个计时信号(Tout) ,之后I_O 管脚由输入转变为输出模式,并维持在高电平状态。在Tout 计时周期内,由外部对I_O 脚做任何下拉动作均无法再度使Driver_O输出振荡波形,当等到Tout 计时完毕之后I_O 脚恢复成为输入状态将会再次启动。当Driver_O 送出超声波驱动信号完毕之后,换能器由发射状态变为接收状态,收到的信号先送入PW0268 的前置放大器,再通过时控增益放大器以及带通滤波器,最后进行回波振幅侦测比较然后输出。回波信号在经过放大器增益处理之后送入内置比较器,当输入振幅超过设置的阈值后便将输出转态至高电平,此时I _O 脚被拉至低电位。
C8051f320 检测到这个下降沿即认为收到回波信号,从而计算出距离值。PW0268 内部原理及外围电路如图3 所示。
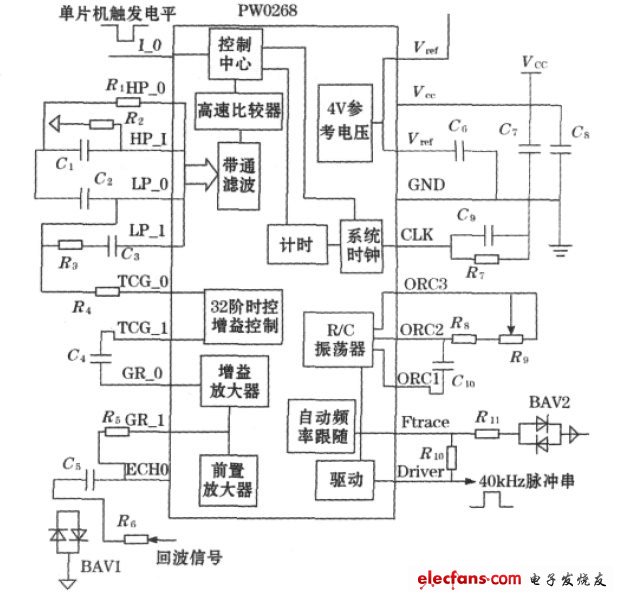
图3 PW0268 外围电路
PW0268 用于超声波测距的最大优势是其内部集成了时控放大器,其增益是以220 /F 为步进递增的,其中F 是指PW0268的系统时钟频率,它是根据所要测量的最大距离计算得出的。
例如,在20 ℃标准大气压下,要测量的范围是5 m,则超声波传输时间:

此时PW0268 的时钟频率为:

进而可以算出增益步进的时间为:

因此对于最大测量距离为5 m 的测距系统而言,PW0268在发出脉冲串后,时控放大器的增益会每过0. 92 ms 步进1 个台阶,进而补偿超声波在波程中幅值的衰减。时控增益步进如图4 所示。
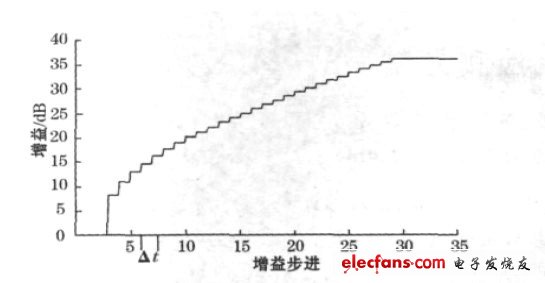
图4 PW0268 的时控增益
4 超声波测距系统软件设计
系统的软件由主程序、定时器计时程序、PCA 捕捉中断程序、环境温度采集以及串行输出和LCD 显示组成。
系统工作在连续实时测距状态下,在初始化后,低电平触发PW0268 发出超声波驱动信号,同时开启PCA 捕捉计时,系统开始等待接收回波信号,当在最大等待时间内接收到回波信号则停止计时,根据环境温度修正声速后,计算出距离值并输出显示,一次完整的测距过程完成; 当在最大等待时间内收不到回波信号,则计时清零重新触发。系统运行的流程图如图5 所示。
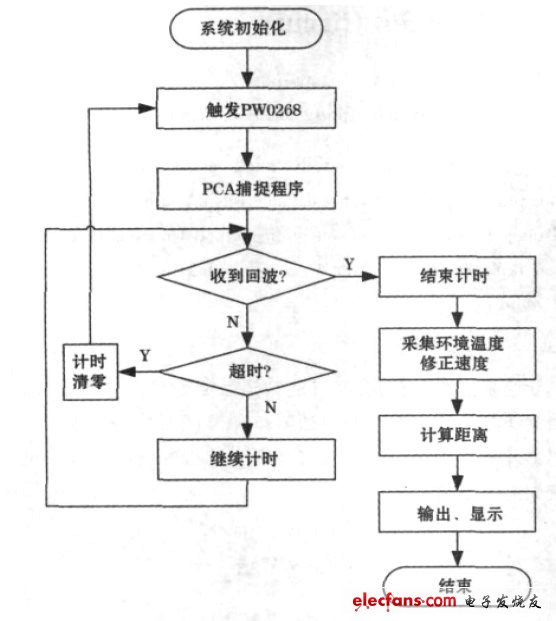
图5 系统流程图
5 实验结果与分析
为标定超声波测距系统测量精度,使用100 cm × 100 cm ×2 cm 硬平木板作障碍物进行测量,并用钢卷尺测量实际距离作为标准值。经过试验验证,所设计的超声波测距系统测量盲区约为300 mm,在( 500 ~ 5 500) mm 范围内对系统进行了3 次正反行程的标定试验,并对实验数据进行了分析和计算,测试数据如表1 所示,拟合直线如图6 所示。由此计算出超声波测距系统静态特性指标,即线性度为: 0. 11%,重复性为: 0. 15%,迟滞为0. 10%.
表1 3 次正反行程实验数据表

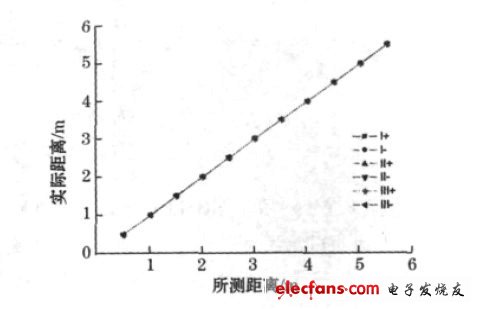
图6 三次正反行程实验数据图
6 结束语
文中所设计的超声波测距系统采用反激变换器不仅将发射超声波的功率大幅度提高,而且有利于回波信号的判断和接收,提高了测距系统的灵敏度和准确性。接收超声波时使用时控增益放大器补偿了信号在波程中的幅值衰减,准确获得了回波信号,进而测算出了距离值。经过实验测试,文中所设计的测距系统不仅测量方法简单,电路结构清晰,成本较低,而且测距性能优良,可应用于工业非接触测距等场所。
-
溪边小小树 2012-08-28
0 回复 举报嵌入式超声波测距系统的设计与实现 收起回复
-
基于STM32的超声波测距系统设计2022-01-06 1923
-
STM32嵌入式是如何实现超声波测距的2021-11-17 1468
-
怎么实现基于stm32最小系统的超声波测距的设计?2021-11-08 1558
-
STM32嵌入式实现超声波测距三种方式2021-08-16 986
-
利用超声波测距来实现报警的功能2021-08-04 1791
-
多点超声波测距报警系统2020-02-26 2982
-
什么是新型嵌入式超声波测距系统?2019-11-01 2452
-
基于STM32超声波测距设计的合集2018-09-05 11574
-
超声波测距技术方案汇总2017-10-16 2000
-
超声波测距系统毕设2016-04-18 6496
-
【OK210申请】基于OK210板卡的视频以及超声波测距方案2015-07-02 1466
-
超声波测距原理2012-04-25 13856
-
超声波测距系统设计2008-10-15 8883
全部0条评论

快来发表一下你的评论吧 !
