

TransModeler中的同向车道流量调整技巧
汽车电子
描述
TransModeler的变道模型适合大范围仿真的路径选择模拟,参数设置非常重要。在大范围仿真模型中,变道模型的参数直接影响了车辆的车道选择。用户常见的问题是,在交叉口同一方向的几个车道,经常是一个车道排了很长的队,而其他可用的车道却没有车辆。这实际上是驾驶行为参数设置的问题。下面用一个案例,详细分析解决这一问题的设置方法。
1、问题描述 某用户在一个片区仿真过程中,发现一交叉口北进口(Link25)左转四条车道中,出现三条车道基本闲置的情况,而最左侧车道的占用率为100%。检查下游路段、车道连通性均无问题,尝试增加左转车辆需求,车辆依旧只在最左侧车道排队。
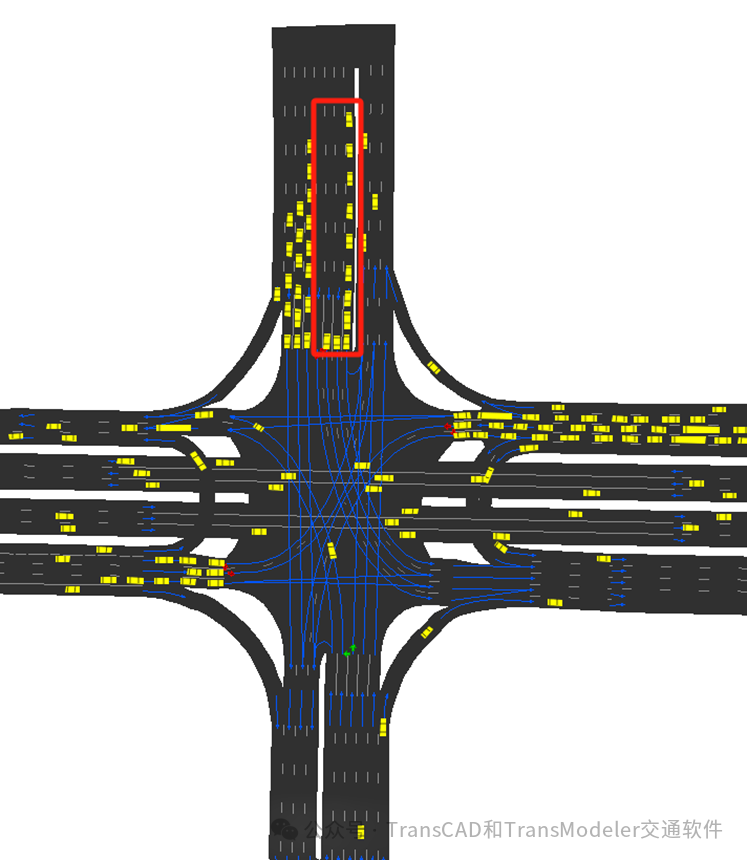
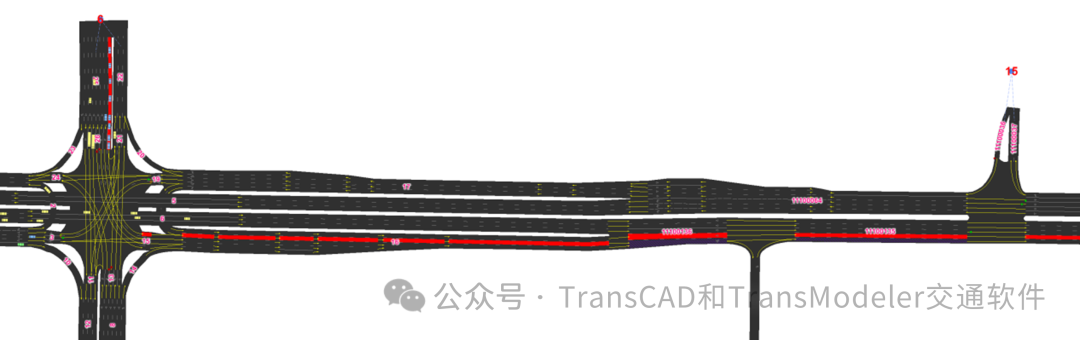
2、原因分析 上述问题的出现,一般是和仿真车辆的网络中的路径选择相关。通过路径分析发现,车辆左转后需要继续直行,途经的路段均为Link25-Link26-Link15-Link16-Link11100136(下图红色路径),但由于涉及多处车道数变化,及Link11100136中公交专用道设置(最右侧车道)的影响,车辆在Link25中选择不同的车道出发,对应的变道次数会有所不同。选择最左侧车道出发的车辆,变道次数最少,只需换一次;若在左侧第二车道,得变道两次;若第三车道,则变道三次。
由于变道次数对路径选择参数的影响太大,导致位于最左侧车道为最优路径选择,但这显然跟实际情况不相符。与仿真驾驶行为中,这个情况和车辆强制变道模型的临界距离(Critical Distances)参数有关。只有当车辆到下个路段的长度大于临界距离参数时,下游车道才会在换道选择集中。每增加一次换道,临界距离相应增加,导致了上述现象。不同国家和地区的驾驶员行为差异,需要通过设置临界距离来加以区分。
3、仿真原理
说了上面的原因后,用户不得不需要了解一下变道模型的仿真原理了。通常,车辆变更车道,可以分为自主变道和强制变道。
(1)自主变道(Discretionary LaneChanging)
在车辆考虑自主或强制车道变更之前,它将首先探索当前和相邻车道,以确定哪些车道符合行驶条件。车道可能因各种原因被视为不具备条件:
当前车道和预期车道之间存在障碍物。
禁止从当前车道变为预期车道(实线),且驾驶员遵守本变道法规。
车道被事故或失速车辆阻塞。
车道有“封闭”车道使用信号。
车道上的收费亭关闭。
不允许车辆进入车道(例如,仅限高载客率车辆进入)。
车辆位于高速公路出口或城市交叉口的“临界距离”内(由前瞻look-ahead模型确定),且预期车道未连接到车辆路径。
自主变道( DLC )主要是在车辆对当前速度普遍不满意的情况下考虑,只有在不需要强制变道( MLC )时才考虑,强制变道优先。如果车辆没有以或接近其期望速度行驶,并且其变道行为没有限制(例如,强制变道、事故),它将考虑自主换道。
(2)强制变道(MandatoryLane Changing)
与自主变道一样,在评估强制变道模型之前,确定合格的车道选择集。用于确定车道合格性的规则与用于自主变道的规则相同。然而,强制变道并不像自主变道更那样被明确地建模为备选方案之间的选择。换言之,驾驶员不会“选择”强制改变车道。相反,各种各样的条件可能会导致车道变更的需要,并且由于缺乏替代方案,车道变更将是强制性的。例如,车辆将进入强制变道状态,以应对其下游车道的事故产生的阻塞。在各种情况下,车辆都需要进行强制变道,例如:
车辆位于其路径分叉位置的“临界距离”内,且不在连接的车道上。
事故或失速车辆阻塞了车辆的当前车道。
车道上显示“封闭”车道使用标志。
当前车道或下游车道预留给其他车辆类型。
没有电子收费通行证的车辆位于下游有电子收费亭的车道上。
正在缩减一条车道(即,车道连线连通性偏差小于1)。
(3)前瞻Look-Ahead
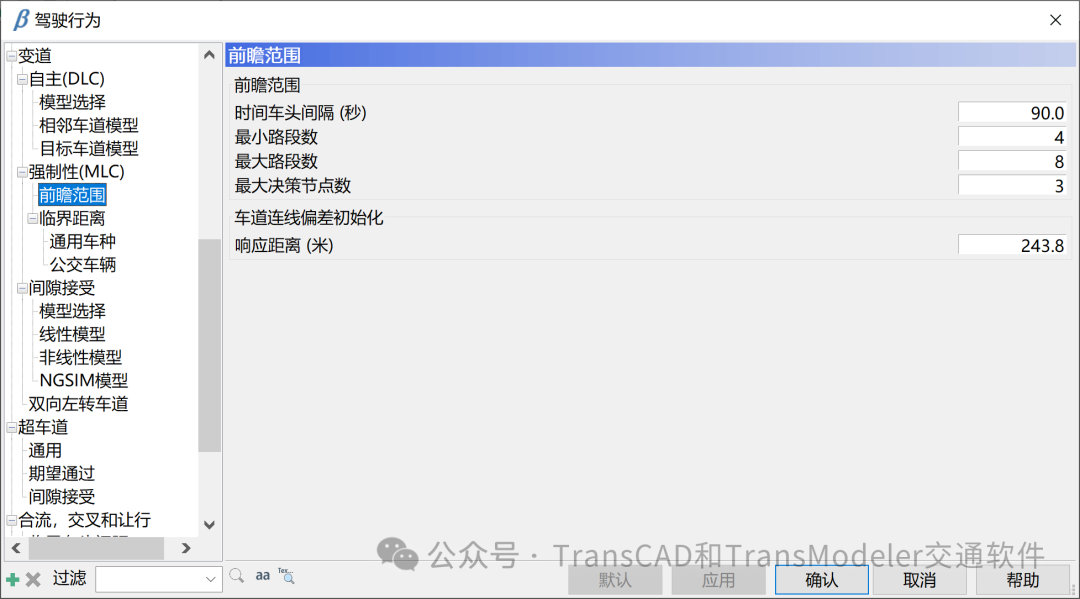
在整个仿真过程中,TransModeler都会对每辆车的下游路径保持一个大致的“概略图”。所有车辆在考虑换道时都会考虑这张“概略图”。对于每辆车,这张概略图相当于驾驶员对其下游路径的感知。意识延伸到下游多远取决于前瞻范围look-ahead range。前瞻范围是以时间为单位测量的。因此,通过计算车辆以每个路段的自由流速度行驶一段由前方距离给定的时间时的下游距离来确定前方距离。换言之,如果前瞻范围为90秒,驾驶员将在大约90秒后意识到其路径。在做出换道决策时,驾驶员将考虑换道对其在接下来90秒内必须执行的操作的影响,以便保持在其路径上。
在特殊情况下,特别是当车辆行驶在或接近一个很长的路段时,合理的前瞻时间范围可能不足以涵盖车辆可能需要在长路段下游执行的移动。为了避免长路段干扰车辆的前瞻范围,TransModeler将保证每辆车的下游路段数量最少。如果可以假设这种情况很少见或为了提高计算效率,您可能会发现减少这个最小路段数是有帮助的。
前瞻时,模型除了考虑转弯或出口外,还将考虑车道减少。例如,如果车道连线的连通性偏差α小于1,则部分驾驶员(1 – α)会尽一切努力在车道结束前强制换出车道。连通性偏差可用于模拟各种情况,例如车道减少,不需要使用车道或更需要使用其他车道。但是,在驾驶员接近车道末端之前,可能无法了解或实现这些条件。因此,有一个参数用于控制连通性偏差开始影响强制换道决策时的响应距离。
(4)临界距离Critical Distance
当车辆前瞻时,它将记录在前瞻范围内其路径上需要变道(即转弯、匝道出口或其他岔路口)的任何点。这些都是临界点(关键点)。在这些临界点上游的临界距离内做出的所有车道改变决定都是强制性的。即使车辆当前处于有利的或连通的车道上,这与车辆在临界点必须走的路径一致,其保持在当前车道上的变道决定也是强制性的。除非存在特殊情况,如阻塞当前车道的事故,否则不会考虑其他替代方案。临界距离因驾驶员而异:更具攻击性的驾驶员在将自己定位在连通车道之前,可能会更愿意冒险接近临界点;更为谨慎、保守的司机可能会在更远的上游做出强制性的车道改变决定,以便跟随他们的路线。
临界距离也可能是和车辆行驶的道路设施类型相关。例如,在高速设施(如高速公路)上,临界距离可能更长,因为当以更快的速度行驶时,必须在更长的距离上做出决定和采取行动。相反,在低速设施(如城市街道)上,临界距离通常较短,因为可以在较短距离内做出决策和采取行动。
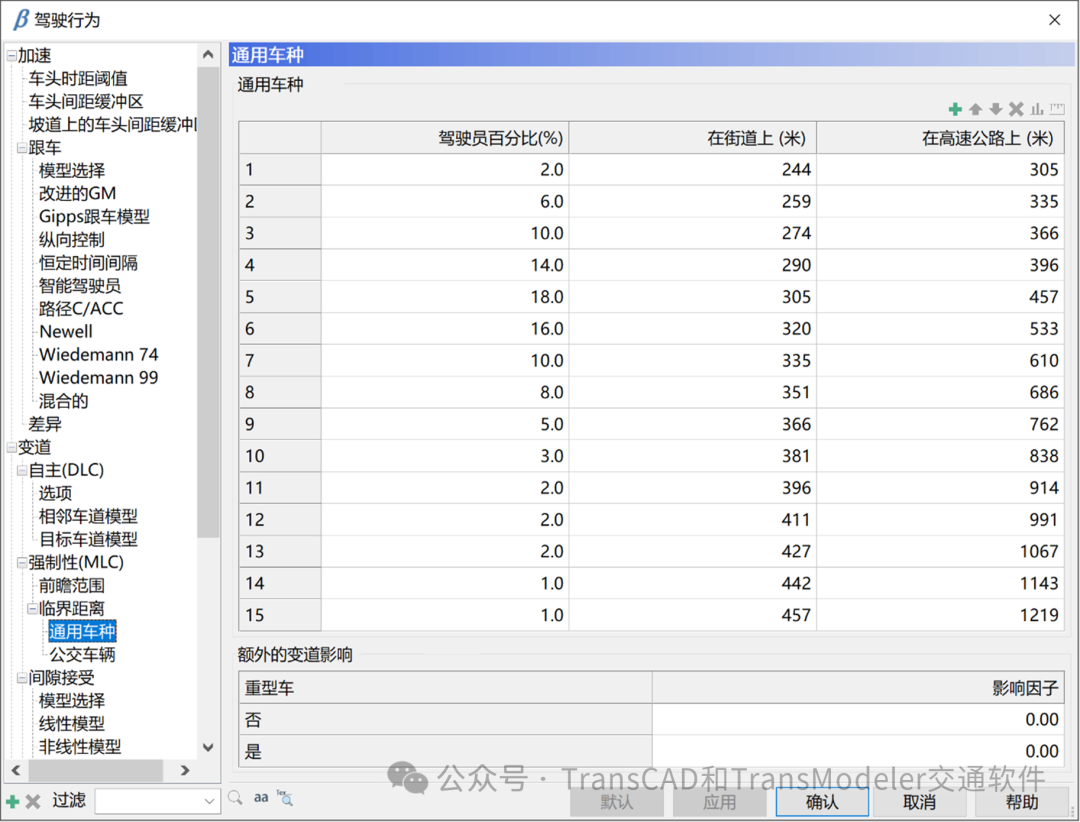
参数表包含高速公路和城市街道上的临界距离在驾驶员中的分布。使用一组给定的临界距离值的驾驶员百分比是明确规定的。此表定义了适用于一般车队(即非公交车辆)的临界距离。第二个参数表用于定义公交车辆驾驶员的分布。下面2个图是TransModeler6.1的参数表界面。
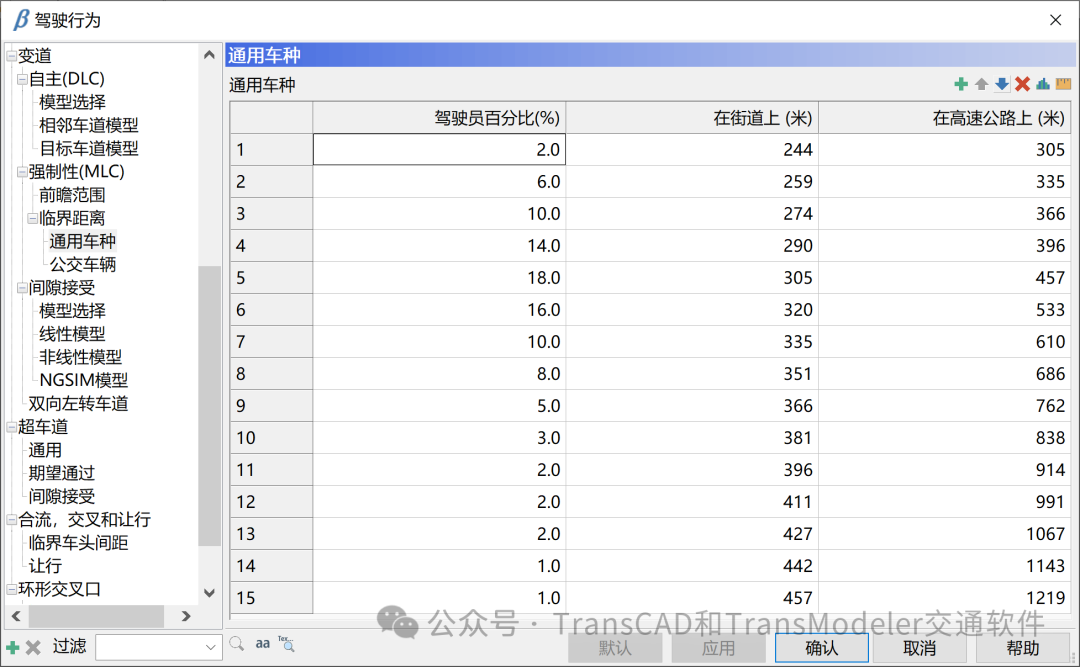
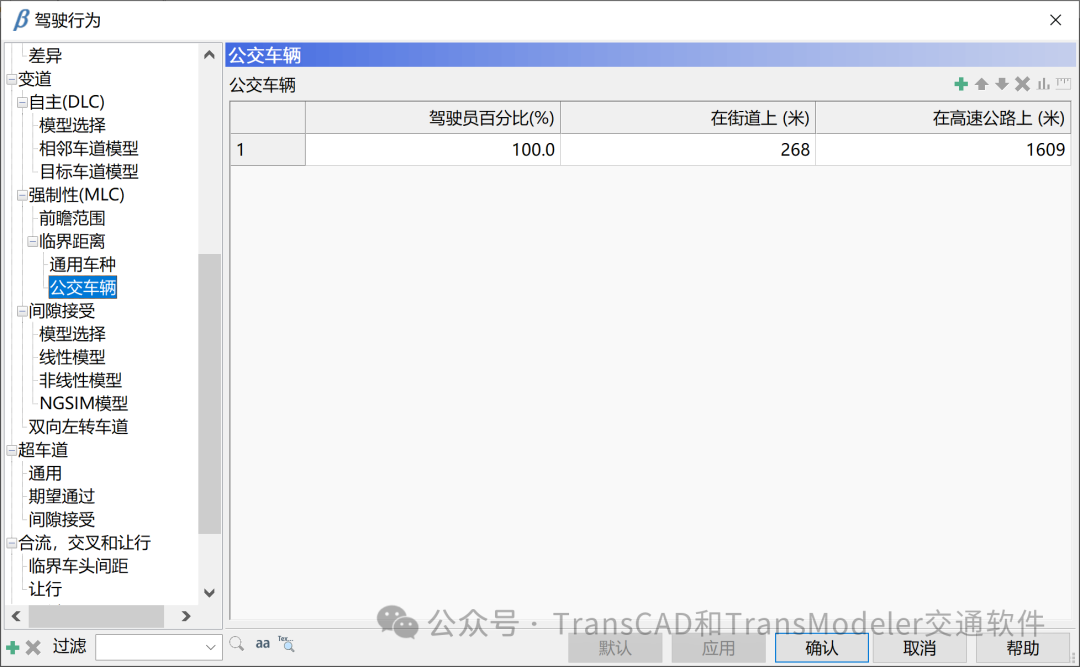
只有当车辆到下个路段的长度大于临界距离参数时,下游车道才会在换道选择集中。每增加一次换道,临界距离相应增加。我们举例子说明该参数是如何在变道模型中发挥作用的。假设临界距离参数为400m(每个司机从随机分布抽取一个随机数,这里假定是400m),如果车辆选择最左侧车道出发,途中变道1次,则只需要提前400m做变道选择即可;选择左侧第二车道出发,途中变道2次,则需要提前800m做变道选择;左侧第三车道出发,途中变道3次,则需要提前1200m做变道选择。在本案例中,Link25-Link26-Link15-Link16-Link11100136的距离约600m,只够做出1次变道选择。
4
、解决方法
(1)延长路段
通过延长Link25后仿真,左转车辆在四个左转车道中均有分布,问题解决。由于本案例正好Link25是仿真建模的边界,适当延长路段可以认为是合理的。但如果路段的实际距离就只有这么长,那这个办法就不可取了。
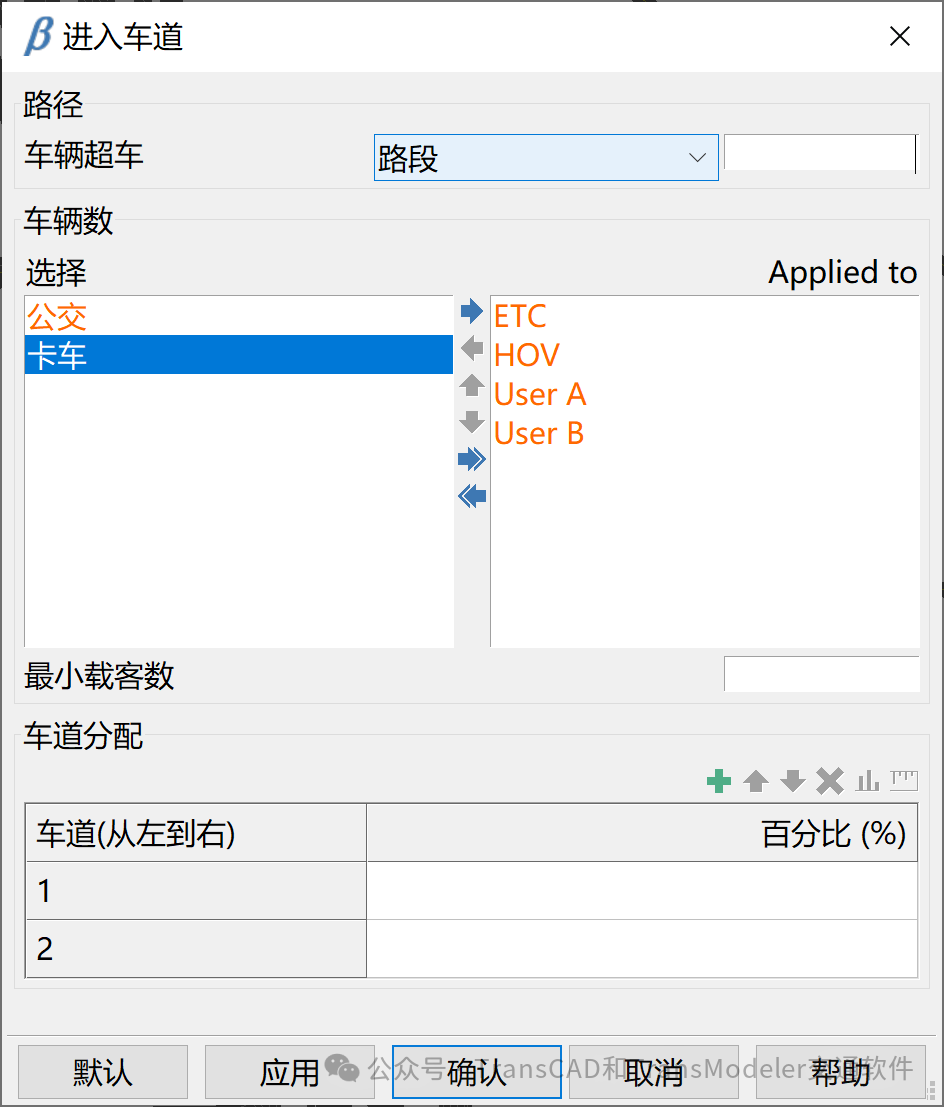
(2)设定起点入口车道参数(Entry Lane at Origin)
该参数作用于出行起点的路段(如本例),制定路段上不同车道的利用率。类似于宏观模型中,设置小区形心连接线的比例。选择 Parameters> Parameter Markers Toolbar ,从下拉菜单中选择 Entry Lane at Origin ,对不同车型在各车道上的利用率进行设置。
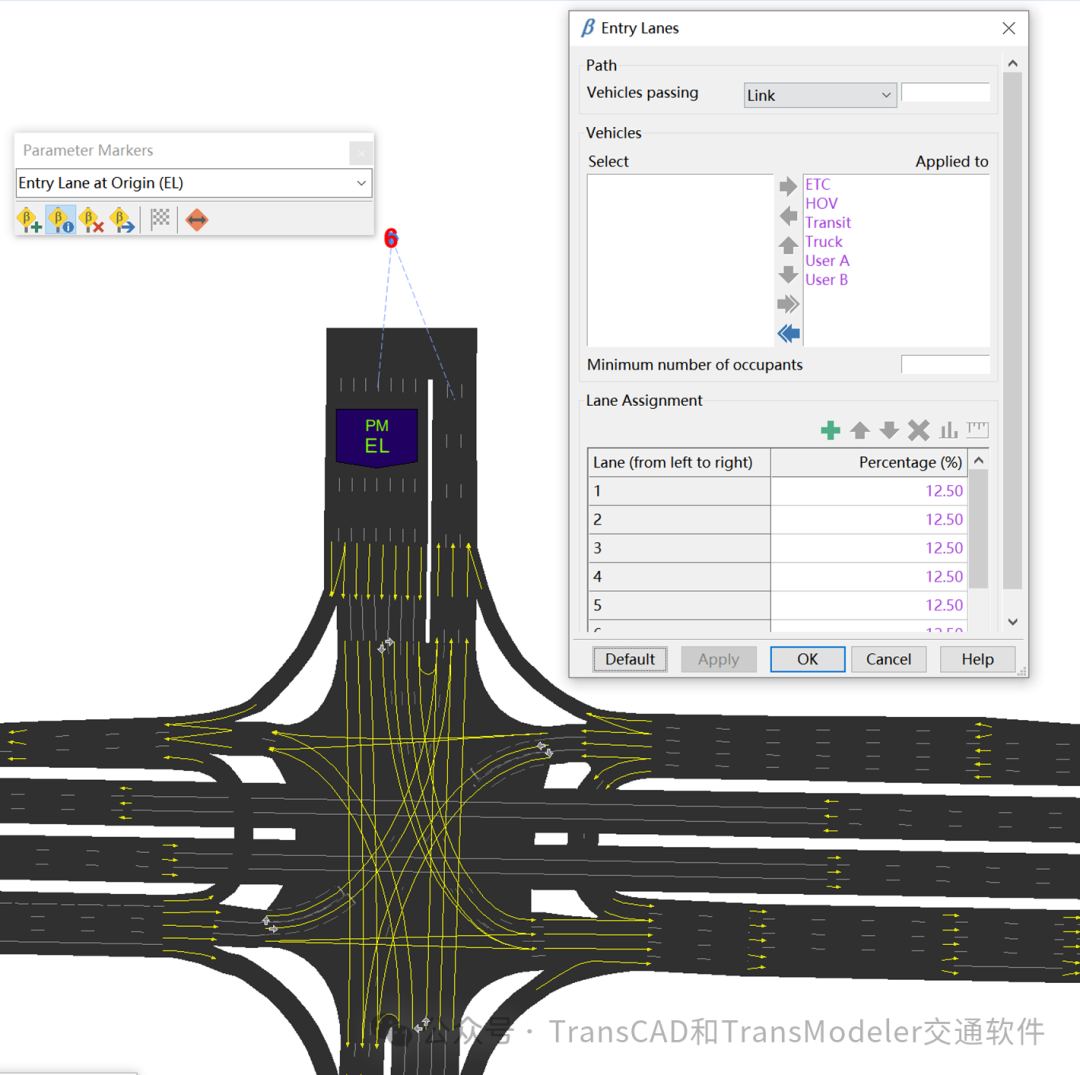
运行仿真, 左转车道的闲置问题得到解决,但是通过分析车辆的下一个转向发现,出现了新的问题,左转车道上分布着直行、右转车辆,与实际情况不符,问题仍未解决。
(3)修改临界距离参数
如果缩短临界距离全局参数值,对当前路段情况可能会有改善,但也可能会在其他地方造成驾驶行为的不合理。可以使用“参数标记”工具,在Link25设定局域参数缩短临界距离。不过,实际应用中网络很大,人工去设置可能也是力不从心的。
(4)完美方法,TransModeler7.0增加的功能
为了从根本上解决这一问题,TransModeler 7.0中新增额外的变道影响(Impact from additional lanes)参数。美国用户用默认驾驶行为参数值1.0(TransModeler 6.1版本中为1.0),中国用户可以选择小于1.0的值,比如0.25,甚至0。我们将参数额外的变道影响记为α,变道次数N所需的最小距离D用公式计算 D=D0*(1.0 + α * (N - 1)),其中D0为临界距离值。对美国用户而言,α=1,D0=400m时,变道三次最晚在1200m处开始选择;而对于中国用户而言,α=0.25,D0=400m时,变道三次只需要在600m处选择。参数α可以反映驾驶行为的激进与保守。另外,参数也区分了是否重型车。
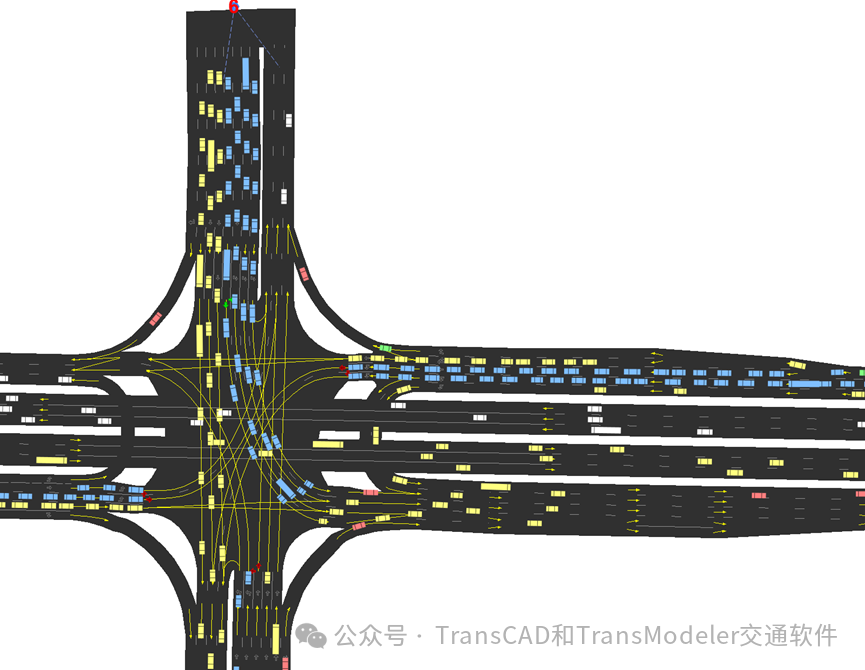
引入新的参数后,仿真瞬时界面效果如下:
审核编辑:黄飞
-
电磁流量计的主要参数及调整方法2024-10-16 3092
-
电磁流量计工作原理公式 电磁流量计的主要参数及调整方法2024-02-05 14979
-
TransModeler SE和TransModeler的对比2022-07-25 1763
-
TransCAD/TransModeler交通影响分析2022-04-06 4721
-
以TransModeler为例介绍TIA的使用2022-04-02 3123
-
基于图像的车道线检测2021-07-20 1126
-
如何实现车道线分割2020-05-22 2095
-
调整型流量计的优势有哪些2020-04-15 1722
-
玻璃转子流量计使用中应注意什么问题2020-04-11 4114
-
怎么设计基于FPGA的车道偏离预警系统?2019-09-18 1950
-
干线交通流量采集传感器布局研究2018-12-04 2514
-
请问电容器中引线径向、同向、轴向的详细图解可以分享一下吗?2018-06-27 7694
-
基于数字信号处理器的单车道车流量实时监测算法2017-12-06 1228
-
车道识别技术2012-04-11 833
全部0条评论

快来发表一下你的评论吧 !
